
小橋工業株式会社により出願された特許
81 - 90 / 198
オフセット作業機
【課題】トラクタにオフセット作業が行えるように装着された作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方にこの走行機体2に対し、その幅方向に水平移動自在に架設される伝動部材13に装着され、前記走行機体2の走行にともなって進行し、前記走行機体2の走行位置に対して側方にオフセットした位置での前進作業中に、畦に沿ったまま前記走行機体2に対する水平回動と水平移動の組み合わせからなる2つの動きの自由度を有する作業部51と、前記作業部51の位置及び方位を検出するセンサ20からの情報に基づいて前記作業部51の水平回動と水平移動の前記2つの量を独立して無段階に制御し、前記走行機体2の旋回をともなう前進動時に前記作業部51を畦に沿わせたまま、その、圃場の隅部付近までの直進性を維持させる制御手段を備える。
(もっと読む)
畦塗り機における前処理体用爪カバー

【課題】土砂を切削する畦切り爪を有する前処理体と整畦体を備える畦塗り機において、前処理体の畦切り爪による切削土砂の飛散範囲を制限し、整畦体の前方に集中させる。
【解決手段】畦塗り機10の前処理体7は、トラクタの後方に接続される支持フレーム13に連結される伝動フレーム14を通じ、トラクタから伝達される動力を受けて軸回りに回転し、整畦体8による畦の整形前に、整畦体8の前方に存在する土砂を切削する畦切り爪2と、畦切り爪2を包囲し、一部に開口を有する爪カバー本体4を備える。爪カバー本体4の開口に面する位置に、畦切り爪2が切削する土砂の飛散の方向を制御する方向制御部材6を接続する。
(もっと読む)
代掻き作業機及びそれに使用される泥除け材
【課題】代掻き作業機の前方に装着される泥除け材に、圃場の泥水上を浮遊する藁等の浮遊物をシールドカバー内部へ引き寄せる機能を持たせたる。
【解決手段】トラクタの後部に装着され、トラクタからの動力を受けて水平軸回りに回転する耕耘ロータとその上方を覆うシールドカバーとを備える代掻き作業機において、下端から高さ方向にスリットが入れられ、このスリットを挟んで長さ方向に複数の受け片に区分された形状をした泥除け材がシールドカバーの進行方向前方側に接続され、受け片における代掻き作業機の幅方向中央部寄りの部分は、シールドカバーへの接続部分より代掻き作業機の進行方向後方側に位置している。
(もっと読む)
代掻き作業機及びそれに使用される泥除け材
【課題】代掻き作業機の前方に装着される泥除け材に、圃場の泥水上を浮遊する藁等の浮遊物をシールドカバー内部へ引き寄せる機能を持たせたる。
【解決手段】トラクタ20の後部に装着され、トラクタ20からの動力を受けて水平軸回りに回転する耕耘ロータ6とその上方を覆うシールドカバー2とを備える代掻き作業機10において、シールドカバー2の進行方向前方側に泥除け材1を接続する。泥除け材1は長手方向に分割された複数の受け片1eを有し、受け片1eの表面に、作業機10の幅方向両側から中央部側へかけて前方から後方に向かう傾斜がつけられた状態でシールドカバー2の進行方向前方側に接続される。これにより、泥除け材1の前方に存在する泥水を受け片1eの傾斜した表面で押したときに、隣接した受け片1e、1e間の間隙1dから泥除け材1の背面側へ誘導させることが可能となる。
(もっと読む)
土付着防止部材及びロータリカバー
【課題】振動によって土砂の付着を防ぎながら、土付着防止部材間への土砂の進入を防ぐ土付着防止部材及び該土付着防止部材を設けたロータリカバーを供する。
【解決手段】トラクタの後部に装着されトラクタと共に進行する作業機本体10に支持される作業ロータ5の上方を覆うシールドカバー2に設けられる複数の土付着防止部材4であって、土付着防止部材4は、シールドカバー2の内側面に作業ロータ5の回転の周方向一方側の位置で固定され、該固定された側の反対側に、その側に隣接する土付着防止部材4に対して平常状態において接触する当接部41が形成される。また、このようなシールドカバー2によってロータリカバー1を構成する。
(もっと読む)
畦塗り作業機
【課題】移動時における走行機体と作業機との前後バランスを向上させ、精度の良い畦塗り整形作業を行える畦塗り作業機を提供すること。
【解決手段】走行機体90に装着される装着部5と、装着部5から左右方向に移動可能なオフセット機構部10と、オフセット機構部10の移動端側に設けられた回動支点Oを中心として、水平方向に回動可能に配設された前処理体21及び整畦体40を有する作業部20と、走行機体90から伝達される動力によって前処理体21及び整畦体40を回転駆動させる動力伝達機構部50とを備えてなる畦塗り作業機において、前処理体21は回転軸23と回転軸23に放射状に取付られる耕耘爪24とを備え、回動支点Oは平面視において整畦体40の回転中心軸上に設けられ、平面視において、整畦体40の回転中心軸の方向と前処理体21における耕耘爪24の取付方向との成す角度が鋭角となるように配置されていること。
(もっと読む)
代掻き作業機及びそれに使用される泥除け材
【課題】代掻き作業機の前方に装着される泥除け材に、圃場の泥水上を浮遊する藁等の浮遊物を作業機幅方向中央側へ引き寄せる機能を持たせたる。
【解決手段】トラクタの後部に装着され、前記トラクタからの動力を受けて水平軸回りに回転する耕耘ロータとその上方を覆うシールドカバーとを備える代掻き作業機において、前記耕耘ロータ側に上方から下方へかけて前記代掻き作業機の幅方向両側から中央部側へ向かう傾斜の付いた凹部が設けられた泥除け材が前記シールドカバーの進行方向前方側に接続されている。
(もっと読む)
代掻き作業機及びそれに使用される泥除け材
【課題】代掻き作業機の前方に装着される泥除け材に、圃場の泥水上を浮遊する藁等の浮遊物をシールドカバー内部へ引き寄せる機能を持たせたる。
【解決手段】トラクタ20の後部に装着され、トラクタ20からの動力を受けて水平軸回りに回転する耕耘ロータ6とその上方を覆うシールドカバー2とを備える代掻き作業機10において、シールドカバー2の進行方向前方側に泥除け材1を接続する。泥除け材1の下端部1fに、代掻き作業機10の幅方向両側から中央部側にかけて下方から上方に向かって傾斜を付ける。
(もっと読む)
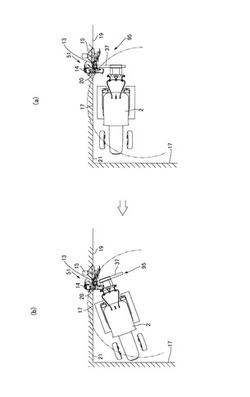
畦塗り機
【課題】トラクタにオフセット作業が行えるように装着された畦塗り作業機の自由度を制御して、精度の高い連続作業を可能にする。
【解決手段】走行機体2の後方に装着され、側方にオフセットした位置で作業部51が前進畦塗り作業を行う畦塗り機50において、作業部51の位置及び方位を検出する位置方位センサ20と、走行機体2と作業部51との相対位置を制御する第一の自由度を構成する手段と、作業部51の姿勢を制御するための第二の自由度を構成する構成手段と、前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御する手段を備え、圃場隅部における走行機体2の姿勢変化に対応して、位置方位センサ20からの情報に基づき前記第一の自由度および第二の自由度における水平回動量または水平移動量を制御し、作業部51が畦に沿って直進姿勢を保持し、圃場の隅部付近までの直進作業状態を維持させる。
(もっと読む)
代掻き作業機及びそれに使用される泥除け材
【課題】代掻き作業機の前方に装着される泥除け材に、圃場の泥水上を浮遊する藁等の浮遊物をシールドカバー内部へ引き寄せる機能を持たせたる。
【解決手段】トラクタ20の後部に装着され、トラクタ20からの動力を受けて水平軸回りに回転する耕耘ロータ6とその上方を覆うシールドカバー2とを備える代掻き作業機10において、シールドカバー2の進行方向前方側に泥除け材1を接続する。
泥除け材1に、上方から下方へかけて代掻き作業機10の幅方向両側から中央部側へ向かう傾斜の付いた傾斜スリット1dを下端から高さ方向に入れ、傾斜スリット1dを挟んで長さ方向に複数の受け片1eに区分された形状に泥除け材1を形成する。
(もっと読む)
81 - 90 / 198
[ Back to top ]