
日本リライアンス株式会社により出願された特許
41 - 50 / 58
走行制御装置、及びその装置における走行制御方法
【課題】材料の後端部分を効率良く切断等することが可能な走行制御装置、及びその装置における走行制御方法を提供する。
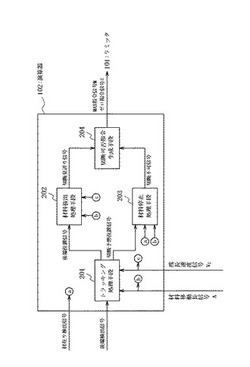
【解決手段】トラッキング処理手段201は、後端検出センサー103からの後端検出信号により材料2の後端を検出し、後端位置及び切断予想位置のトラッキングを開始する。材料抜出処理手段202は、材料2の後端が成形ロール23の最終段から抜ける際の切断予想位置とキャリッジ1の位置とが重なるか否かを判断し、重なる場合は、切断見送り信号を出力する。材料停止処理手段203は、材料移動長信号Aにより材料2の停止を確認した後、材在り検出センサー104からの材在り検出信号、切断予想位置、前進限及び待機位置に基づいて材料2が停止した後の切断可否を判断し、切断否の場合に切断不可信号を出力する。
(もっと読む)
ヒューズ溶断および瞬停検出装置、および方法

【課題】一つの回路でヒューズ溶断と瞬停とを検出することができるヒューズ溶断および瞬停検出装置、および方法を提供する。
【解決手段】第2の信号判別手段63は、第1の電圧無し信号Dが第1の設定時間T1内に電圧有り信号に復帰しない場合に、第2の電圧無し信号Eが第2の設定時間T2内に電圧有りの信号に復帰するか否かを判別する。第2の電圧無し信号Eが電圧有りの信号に復帰するとき、交流電源52が瞬停したと判断し、瞬停検出信号を出力する。第2の電圧無し信号Eが電圧有り信号に復帰しないとき、ヒューズ溶断と判断し、ヒューズ溶断検出信号を出力する。
(もっと読む)
走行制御装置
【課題】走行切断機等を待機位置である原点に戻すことなく材料を切断等する処理を、簡易な構成により実現することが可能な走行制御装置を提供する。
【解決手段】リミッタ101が、(A)後退速度基準信号VB≦前進速度基準信号VA−VC≦MAXの場合は前進速度基準信号VA−VCを速度指令信号SRとして出力し、(B)前進速度基準信号VA−VC<後退速度基準信号VBの場合は後退速度基準信号VBを速度指令信号SRとして出力し、(C)MAX<前進速度基準信号VA−VCの場合はMAXの値を速度指令信号SRとして出力する。すなわち、切断の一連の処理について、リミッタ101が前進速度基準信号VA−VCを速度指令信号SRとして出力することにより、キャリッジ1が原点に戻らなくなるから、短尺切断を行うことができる。
(もっと読む)
交流電源装置およびその装置におけるアーク抑制方法
【課題】特にスパッタなどのプロセスを用いて半導体や液晶基板などを製造する製造装置分野において、プロセスの過程で発生するアークを抑制し、発生したアークエネルギを最小限に抑えるのに適した交流型の電源装置およびその装置におけるアーク抑制方法を提供する。
【解決手段】交流電源装置62は、アース電流検出器65、電力制御/発振部63、発振制御手段64および直流制御用電源37を備える。交流電源装置62のシャーシと負荷装置24のシャーシ66との間にアース線を接続し、かつ商用交流電源22と交流電源装置62のシャーシとの間にアース線を接続する。アース電流検出器65はアース電流を検出し、発振制御手段64は、アース検出器65により検出されたアース電流に基づいてアークの発生を検出し、高周波電力変換器30に負荷装置24へのエネルギ供給を遮断させる。
(もっと読む)
交流電源装置およびその装置におけるアーク防止方法
【課題】アーク放電の発生を防止すると共に、負荷装置へ供給する高周波交流電力の遮断制御を高速にかつ連続的に実現可能な交流電源装置およびその装置におけるアーク防止方法を提供する。
【解決手段】電流レベル設定器33は、直流電力指令値および放電電圧値から演算された値と、高周波トランス10の巻線比とに基づいて電流レベル指令値を設定する。指令選択器34は、定常モードの電流レベル指令値または起動・再起動モードの電流レベル指令値を設定する。第1の比較器43は、電流レベル値と電流レベル指令値とを比較し、電流レベル値が電流レベル指令値と同等または上回ったときに、遮断信号発生器44に制御遮断信号を出力させる。ゲート制御・遮断器54は、スイッチング制御信号GのパルスをOFFする。
(もっと読む)
交流電源装置およびその装置におけるアーク抑制方法
【課題】アーク放電を抑制することができ、かつ、アーク放電の検出から復帰までに必要なエネルギーを抑えることができる交流電源装置およびその装置におけるアーク抑制方法を提供する。
【解決手段】AC−DC整流器25及びDC−DC整流器27が、商用交流電力から直流電力に変換し、DC−AC変換器30が、直流電力から高周波交流電力に変換し、高周波トランス31を介して高周波交流電力を負荷へ供給する。発振制御手段35は、電流検出器32が検出した高周波交流電力の電流値を入力し、この電流値に基づいてアーク放電を検出し、前記高周波交流電力の供給を遮断させる。その後、初期パルス巾〔P〕から設定パルス巾〔HA〕に漸増して変化するようなパルスを生成し、このパルスを有するスイッチング信号をDC−AC変換器30に出力する。
(もっと読む)
移動体の位置検出装置および方法
【課題】エンコーダによる2相の正弦波信号に電気的なノイズが重畳しても、位相遅れが抑制でき、かつ位置の精度を向上できる位置検出装置を提供する。
【解決手段】移動体の目標位置を設定する位置指令器54と、
エンコーダの出力するA相の正弦波信号と、位相がA相の正弦波信号と90度だけ異なるB相の正弦波信号と、目標位置に基づくA相の余弦波発振信号と、位相がA相の余弦波発振信号と90度だけ異なるB相の余弦波発振信号とを入力し、余弦波発振信号と正弦波信号との位相差を検出する位相差検出手段72とを備える。
(もっと読む)
交流電源装置およびその装置におけるアーク抑制方法
【課題】高周波電源装置、特にスパッタなどのプロセスを用いて半導体や液晶基板などを製造する製造装置分野において、プロセスの過程で発生するアークを抑制し、発生したアークエネルギーを最小限に抑えるのに適した交流型の電源装置を提供する。
【解決手段】電圧検出器34は、高周波電力変換器30により変換され負荷装置24へ供給される出力電圧帰還信号Eを検出する。発振制御手段36のアーク検出手段43に備えた比較器50は、高周波電力変換器30のスイッチング素子を動作させるパルス指令信号Jと、前記出力電圧帰還信号Eから生成された帰還パルス信号Hとを入力する。パルス指令信号Jのレベル値が帰還パルス信号Hのレベル値と異なるときのみ、アーク検出信号Kをラッチおよび遮断信号発生器51に出力する。
(もっと読む)
パイプ切断方法
【課題】カッタの交換サイクルが短くなるという問題と、カッタの交換のためのライン停止によって、溶接作業が断続的になってパイプに溶接不良が発生するという問題を解決したパイプ切断方法を提供する。
【解決手段】パイプを挿通する穴を中央部に有し、レール上をカッタが移動可能に設けられた回転体の回転角度と、カッタの位置とによる目標座標毎に切断軌道を求めて、回転体およびカッタを駆動制御して前記パイプを切断するパイプ切断する際に、カッタがパイプを切断するときのカッタの切断軌道を、切断毎に変化させて切断する。
(もっと読む)
位置決め制御装置
【課題】速度指令のテーブルを作成することなく制御対象を位置決めできる位置決め制御装置を提供する。
【解決手段】位置決め制御装置は、制御対象を目標位置に停止させる場合の現在位置を検出する位置検出器104x,104y,104zと、現在位置と目標位置との相対距離から速度指令を演算する速度指令演算手段16と、速度指令と制御対象の現在位置における実測度とにもとづき制御対象を速度制御する速度制御ユニット17,18,19とを有する。
(もっと読む)
41 - 50 / 58
[ Back to top ]