
日本リライアンス株式会社により出願された特許
21 - 30 / 58
マーク信号処理装置及びマーク信号同期方法
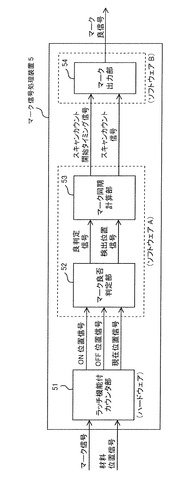
【課題】マーク信号の良否判定を行ってその結果を出力する場合に、その結果を出力するタイミングのバラツキを抑える。
【解決手段】マーク信号処理装置5は、低速タスクのソフトウェアAを実行するマーク良否判定部52及びマーク同期計算部53、並びに、高速タスクのソフトウェアBを実行するマーク出力部54を備える。マーク良否判定部52及びマーク同期計算部53は、マーク信号の良否判定を行うと共に、スキャンの開始時点からマーク信号のON位置時点までの間の時間幅からスキャンカウントT3a,T3bを算出し、スキャンカウント開始タイミング信号及びスキャンカウント信号(T3a,T3b)を出力する。マーク出力部54は、スキャンカウント開始タイミング信号の入力時点からスキャンカウントT3a,T3b経過後に、マーク良信号を出力する。このとき、マーク良信号はマーク信号に同期する。
(もっと読む)
ロータリーカッタの制御装置

【課題】ロータリーカッタの上刃及び下刃のクリアランスを確実に調整する。
【解決手段】ロータリーカッタ1の制御装置10におけるコントローラ11は、マスタ側制御手段とスレーブ側制御手段を備え、マスタ側制御手段が、基準となる速度指令ω1*に基づいて、上刃用ロータリーカッタ2を回転制御する。また、スレーブ側制御手段は、上刃及び下刃の位置偏差及び所定のクリアランスΔθに基づいて位置偏差速度指令Δω*を生成し、基準となる速度指令ω1*及び位置偏差速度指令Δω*に基づいて、下刃用ロータリーカッタ3を回転制御する。
(もっと読む)
電動機の制御装置及び方法
【課題】シート送り装置のスリップ及びバックラッシュを抑制し、かつ、シートをフィード設定長だけ搬送する電動機制御装置及び方法を提供する。
【解決手段】減算器47が測長ロールパルス数から送りロールパルス数を減算してパルス数偏差を求め、微分器47が時間微分して速度差を求め、BL/SL判別手段が速度差に基づいてバックラッシュ及びスリップの存在を判定する。バックラッシュ補正制御手段50が、パルス数偏差に基づいて、バックラッシュを抑制するための位相補正値を出力し、スリップ補正制御手段が、速度差に基づいて、スリップを抑制するための補正後フィーダ加速時間及びフィーダ減速ゲイン値を出力する。そして、主制御手段44が、位相補正値、補正後フィーダ加速時間及びフィーダ減速ゲイン値を用いてそれぞれ速度指令Qを求める。これにより、バックラッシュ、電動機6´の加速時のスリップ及び減速時のスリップをそれぞれ抑制する。
(もっと読む)
同期制御システム、制御装置及び同期制御方法
【課題】複数の制御装置により構成される同期制御システムにおいて、同期運転を実現する際に、安全性を確保すると共に、システム全体として煩雑さを解消し、コストを低減する。
【解決手段】サブマスタ及びスレーブの制御装置10−2〜10−nは、マスタの制御装置10−1により送信された同期カウンタ値Vに基づいて、自らの基準カウンタ値Uを調整し、同期運転を行う。サブマスタの制御装置10−2は、同期カウンタ値Vを受信することができない場合、サブマスタからマスタにモードを切り替え、自らのカウンタ122のカウンタ値をスレーブの制御装置10−3〜10−nへ送信する。スレーブの制御装置10−3〜10−nは、新たなマスタの制御装置10−2からのカウンタ値に基づいて基準カウンタ値Uを調整し、制御装置10−2〜10−nの同期運転を維持する。
(もっと読む)
電源装置
【課題】コンデンサに蓄積するエネルギー量を一層増大させ、コンデンサの容量及び入力交流電源の容量を一層小さくする。
【解決手段】電源装置1は、入力交流電源10と、入力交流電源10からの交流電圧を直流電圧に変換するコンバータ40と、コンバータ40が出力する直流電圧を昇圧制御するコンバータ制御手段70と、コンバータ40からの直流電圧を交流電圧に変換し、モータ120に電流を供給するインバータ60と、コンバータ40とインバータ60との間に接続され、電気エネルギーを蓄積するエネルギー蓄積用コンデンサ50とを備えて構成される。これにより、コンバータ40の直流電圧を昇圧するようにしたので、エネルギー蓄積用コンデンサ50の両端にかかる電圧が高くなり、エネルギー量を一層増大させることができる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
ロールの巻径検出方法、ロール制御方法及びロール制御装置
【課題】送り出しロールが低速で回転するときであっても、送り出しロールの巻径を正確に演算し、送り出しロールを所望巻径にて正確に停止させる。
【解決手段】巻径及び残径補正量演算部93は、逐次最小二乗法を適用することにより、巻径同定ウエイトを用いて巻径偏差を算出して巻径同定値r2_HAT(n)を演算する。また、逐次最小二乗法を適用することにより、ウエブ厚同定値δ_HAT(n)を演算し、最大ライン速度VLmaxから所定時間taにて速度ゼロになるように残径補正量Δrを演算する。周速指令演算部94は、残径r0に残径補正量Δrを加えた残径送り出し径Rと巻径同定値r2_HAT(n)とに基づいて、残径r0にてライン速度Vがゼロになるように正規化周速指令V_BAR*を演算する。搬送ロール制御装置66は、この正規化周速指令V_BAR*によりライン速度Vを制御する。
(もっと読む)
ツイン・ドライブ制御装置及び捻り振動抑制方法
【課題】負荷を両側から同期モータで駆動する場合、2台の同期モータの初期磁極位相が異なるときであっても、負荷の捻り振動を抑制可能なツイン・ドライブ制御装置及び捻り振動抑制方法を提供する。
【解決手段】回転位相補正手段74が、同期モータ6A,6Bの初期磁極位相θ1,θ2を考慮して回転位相を補正し、座標変換器75が、補正後の回転位相を用いて、共通する単一の3相正弦波電圧指令V*u,V*v,V*wを生成する。PWM制御器56が、3相正弦波電圧指令V*u,V*v,V*wに基づいて単一のPWM信号Vup,Vvp,Vwpを生成し、電力変換器57,76が、PWM信号Vup,Vvp,Vwpに基づいて同期モータ6A,6Bの電力制御をそれぞれ行う。これにより、同期モータ6A,6Bの初期磁極位相が異なるときであっても、発生トルクを同一にすることができ、負荷の捻り振動を抑制することができる。
(もっと読む)
インバータの並列運転を行う電力変換装置及び電力変換方法
【課題】複数のインバータの並列運転により1台の単巻線の電動機を駆動する場合に、複数のインバータに対するゲート信号を同期させることが可能な電力変換装置及び電力変換方法を提供する。
【解決手段】電力変換装置1は、2台のインバータの並列運転を行う場合に、商用交流電源101から3相交流電力を入力し、制御回路40が電圧指令を生成し、同期信号及び電圧指令を2台のインバータ30−1,30−2にシリアル通信により送信し、インバータ30−1,30−2が同期信号及び電圧指令を受信してゲート信号Gを生成し、このゲート信号Gにより交流電力を生成し、各インバータ30−1,30−2からの交流電力を合成して、単巻線の電動機102を駆動する。
(もっと読む)
フォーミングラインに用いる制御装置及び制御方法
【課題】フォーミングラインにおいて、材料を設定切断長で切断する場合、クラッチにかかる負担を軽減すると共に、生産性を向上させることが可能な制御装置及び制御方法を提供する。
【解決手段】プレス装置3により材料を短尺長で切断する場合、間欠運転ではなく連続運転を行う。具体的には、中央制御手段441は、切断処理毎にクラッチ32に対してON/OFFするためのクラッチ指令信号を出力するのではなく、クラッチ32をON状態にしたまま連続して複数の切断を行うためのクラッチ指令信号を出力する。つまり、中央制御手段441は、走行台車2を材料10に追従して走行させ、材料10の速度に同期したプレス速度でプレス装置3を連続して動作させる。
(もっと読む)
21 - 30 / 58
[ Back to top ]