
株式会社オーエム製作所により出願された特許
11 - 20 / 34
包装機
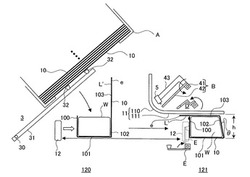
【課題】包装シートの底面パネルに被包装物を載置した状態で前方へ送り出しながら前記包装シートを箱状に成形して被包装物を包み込むラップラウンド式の包装機において、包装シート(10)の一辺から延長する端末フラップ(e)の接着不良を防止すると共に、包装箱の奇麗な仕上がり形状が確保できるようにする。
【解決手段】包装シート(10)の底面パネル(101)と平行に折り曲げられた天面パネル(103)を移送方向に移動させることにより、端末フラップ(e)の基端部の折曲線(L')を第2側面パネル(100)の上端に一致させる補正手段(B)と、端末フラップ(e)が第2側面パネルの外面の接着剤塗布部に圧接されるときに、第2側面パネルの外面を吸着することによって該第2側面パネルが内側へ倒れ込むのを防止する為の吸着手段(E)を備えていること。
(もっと読む)
包装用箱の蓋閉め方法

【課題】フラップ部が包装物と干渉することなく、フラップ部を箱本体部の内部にスムーズに差し込むことができる包装用箱の蓋閉め方法を提供する。
【解決手段】まず、箱本体部21の側面を吸着器4により保持した状態で、箱本体部21の底面を押上体51により上方向に向けて押し上げて、包装物1を箱本体部21の開口部21aから突出させる。次に、包装物1の箱本体部21から突出している部分を上下方向に延びるガイド面を有するガイド部材7の下端部により箱本体部21の内方に向けて押さえ付けて、包装物1を箱本体部21の内面から離す。ガイド部材7で包装物1を押さえ付けた状態で、蓋部22の上面を押込体61により下方に向けて押込むことにより、フラップ部23の先端をガイド部材7のガイド面71に当接させながら箱本体部21の内面と包装物1との間に挿入する。
(もっと読む)
包装機
【課題】被包装物を包装シートで包み込む包装機において、包装機の駆動に必要なエネルギー効率の向上と、作業環境の悪化防止を図る。
【解決手段】包装シート10の取出し、成形、前記包装シート10への被包装物13の挿入、及び前記包装シートの封緘並びに圧着を行う各工程のアクチュエータは電気モータで駆動される構成であり、前記各アクチュエータの出力部の、移動速度、移動距離、又は、前記被包装物側への押圧力は、前記電気モータの出力を数値データで設定することで調節できること。
(もっと読む)
包装装置
【課題】矩形状の包装箱の各面に対応するパネル部を具備する展開状態のブランクシートを折り曲げながら被包装物を包み込むように包装すると共に、隣接する一対のパネル部を突合せたコーナ部を接着剤で固定するものであって、前記接着剤で固定される構造は、前記コーナ部で突き合わされる一方のパネル部の端部から延長する胴フラップを折り曲げることにより、他方のパネル部の外面に重ね合わせて両者を接着剤で固定する構造である、包装装置に於いて、接着時に前記他方のパネル部が内側に倒れ込むのを防止する。
【解決手段】胴フラップ(211)が前記他方のパネル部(22)の外面に重ね合わされているときに、前記他方のパネル部(22)の外面をバキュームヘッド(41)で吸引する。
(もっと読む)
工作機械の直線案内装置
【課題】転がり案内の高速性・運動精度を有すると共に、優れた振動減衰性をも兼ね備えながらも無給油化も図れる画期的な工作機械の直線案内装置を提供すること。
【解決手段】ハイブリッド式の工作機械の直線案内装置であって、前記すべり案内部4の前記ガイド面8と前記すべり面9との隙間10を調整自在に構成し、このガイド面8とすべり面9との隙間10を、加工時の負荷により生じた前記転がり案内部3の弾性変形により接触面圧が生じ、非加工時はこの隙間10が0(ゼロ)以上になるように設定し、このガイド面8とすべり面9との少なくともいずれか一方面に摩擦抵抗を下げる硬質炭素膜11を形成した工作機械の直線案内装置。
(もっと読む)
バーコード印字装置
【課題】印字機の前方を搬送される物品(B)にバーコード(9)を印字するバーコード印字装置に於いて、構造の簡略化及び小型化を図ると共に、制御の簡略化及び処理の高速化を図る。
【解決手段】物品(B)を搬送方向に垂直な方向から挟持しながら走行する一対の平行な第1,第2コンベヤ(40)(41)からなる挟持コンベヤ(4)と、前記挟持コンベヤ(4)の駆動源たるサーボモータ(5)と、前記挟持コンベヤ(4)の走行域中の印字ステーション(30)に配設され、且つ前記搬送される物品(B)の表面にバーコードを印字する印字機と、前記印字ステーション(30)の上流側の基準位置まで搬送された前記物品(B)を検知する検知センサ(6)と、前記搬送される物品(B)が前記検知センサ(6)で検知されてから、前記印字機による印字位置に到達するまでの距離に対応する位相だけサーボモータ(5)が回転したときに該サーボモータ(5)を停止させた状態で前記印字機を作動させる。
(もっと読む)
工作機械の自動旋回型タレット装置
【課題】複雑な設計や制御を要する油圧低減機構を施す必要もなく、円滑で耐久性に秀れた旋回機能を簡易な構成で容易に確保できる油圧レスの自動旋回型タレット装置を提供すること。
【解決手段】クラッチ解除用圧力室6にエアを流入することでタレット3を軸方向にスライドさせてクラッチ装置4の係止固定を解除する際に突き当たるスライド移動用間隙7の内面部に、このタレット3の旋回時の摺動摩擦抵抗を低減する抵抗低減用部材9を設け、戻りスライドして前記クラッチ装置4で係止固定した旋回不能な加工位置の前記タレット3をクサビ係止保持するように構成したクサビ機構13を備えた工作機械の自動旋回型タレット装置。
(もっと読む)
工作機械
【課題】刃物台や刃物台に設けるラムに干渉することなく、これらの側面と面一あるいはこれよりもう少し側方へ突出した位置で割出し自在となり、360度割出し自在で自動交換可能なユニバーサルアタッチメントを実現でき、故にこのように交換自在にして加工方向も広範囲となるため一層自在に様々な加工が行える極めて秀れた画期的な工作機械を提供すること。
【解決手段】工具アタッチメント9に回転工具7を取り付ける回動自在工具取付部10を360度割出し回動自在に設けて、自動交換自在なユニバーサルアタッチメントであって360度広範囲に割出し制御でき、工具7を伝達回転することもでき、様々な向きにミーリング加工が行える工作機械。
(もっと読む)
物品押出装置
【課題】信頼性の高い過負荷防止機能を担保しつつ、剛性の低い物品をプッシャで高速処理できるようにする。
【解決手段】後退位置から進出位置へ移動する牽引体44と、前記進出位置へ移動する牽引体44に、磁気吸着力で連結されて牽引されるプッシャ4を具備し、前記牽引されるプッシャ4によって、該プッシャ4の移動方向に物品1を押し出す物品押出装置に於いて、牽引により移動し始めるプッシャ4に対し、移動方向へ力を作用させる補助加速手段6を設けた。
(もっと読む)
連続糊付装置
【課題】包装箱を搬送方向へ搬送速度Vで搬送する搬送装置と、前記搬送方向に垂直な方向から、前記包装箱表面の糊塗布域に接着糊を噴射するノズルと、前記包装箱表面に於ける前記糊塗布域の形成位置を設定する糊位置設定手段と、を具備する連続糊付装置に於いて、製品の生産速度等の変更に伴って前記搬送速度Vが変化しても、糊塗布域が適正位置からずれないようにする。
【解決手段】前記糊塗布域13と前記ノズル22との前記垂直な方向の対向距離δ及び糊噴射速度V1に基づいて、前記ノズル22から噴射された接着糊が前記糊塗布域13に到達するまでに経過する遅延時間「δ/V1」を演算する遅延時間演算手段を設け、前記糊塗布域13が前記ノズル22に対向する時より前記遅延時間「δ/V1」だけ前の時点で、前記接着糊を噴射させる。
(もっと読む)
11 - 20 / 34
[ Back to top ]