
独立行政法人科学技術振興機構により出願された特許
1,701 - 1,710 / 1,734
擬微小重力環境下での骨髄細胞を用いた3次元軟骨組織構築方法
本発明は、RWV等のバイオリアクターによって実現される擬微小重力環境下において骨髄細胞を培養することにより、3次元に軟骨組織を構築する方法に関する。 (もっと読む)
画像からの対象物検出方法及び対象物検出装置
画像の質や種類等に影響を受け難いロバストな画像処理方法によって、画像から良好に対象物(好適な例では、細胞)の位置あるいは/および個数を求める。画像から対象物を検出する方法は、着目画素を含む所定領域内の複数の画素の画素値に基づいて算出した該所定領域の特徴値を該着目画素のスコアとし、該画像における各画素についてスコアを算出するステップと、算出されたスコアの大きさ順に画素を選択し、選択された画素1から順に該所定領域と同一あるいは近似の領域を排他的領域2として該画像中に配置するステップと、該配置された一つあるいは複数の排他的領域の少なくとも一部を該対象物として検出するステップとを有する。好ましい態様では、当該画素のスコアが極大である場合に、当該画素を選択して、排他的領域を配置する。好ましい態様では、該特徴値は、該領域内の複数の画素の画素値の平均値である。 (もっと読む)
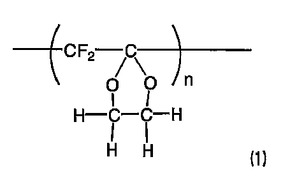
フッ素化ポリマー、フッ素化化合物及びポリマーの製造方法
下記式(1)で表される繰り返し単位を含むフッ素化ポリマー、前記フッ素化化合物及びフッ素化ポリマーの製造方法、及び前記フッ素化ポリマーを含む光学的/電気的材料又はコーティング材料。
【化1】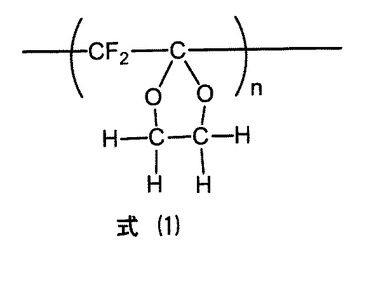
 (もっと読む)
(もっと読む)
通信システム及びそれを用いた通信方法
伝送路での偏光状態の攪乱に対して安全性が損なわれない折り返し構成をとりながらファラデーミラーを用いずに、また偏光依存性のある位相変調器が使用できる通信システム及びそれを用いた通信方法を提供する。
本発明の量子暗号システムは、時間的に分割された光パルスを伝送路2に放出し、伝送路2から折り返してきた光パルス間の位相差を測定する手段を備えた第1のステーション1と、光の媒体となる前記伝送路2と、光パルスの進行方向を反転させる手段と分割された光パルス間に送信する乱数ビット値に対応した位相差を与える手段と入射した光パルスを直交偏光成分に分割し、直交偏光成分間に180度の位相差を与える手段と各々の偏光を90度回転させる手段と、さらに直交偏光成分を合成する際に前記90度回転からのずれ成分を除去する手段を有し、伝送路2に再び光パルスを放出する際、パルスの強度が1ビットあたり1光子以下になるように減衰させる手段を有する第2のステーション3からなる。
(もっと読む)
高周波用配線構造及び高周波用配線構造の形成方法並びに高周波信号の波形整形方法

【課題】 VLSI等を実装する高周波用実装基板用の新たな配線構造を提供する。
【解決手段】 高周波信号が伝送される伝送線を構成する配線パターンを形状の相違により特性インピーダンスが異なる複数のセグメントS0〜S11により構成する。そして複数のセグメントのそれぞれの特性インピーダンスZ0〜Z11を、伝送線を伝播する信号の波形歪を減少させる反射波を隣接する二つのセグメントどうしの境界で発生させるように定める。
(もっと読む)
電気化学セル用電極及び電気化学セル
本発明は、プロトン導電性電解質を備えた電気化学セル用の電極であって、アノード及びカソードの少なくとも一方が、水素透過性を有する固体を用いたものであることを特徴とする電極、及びその電極を備えた電解セルである。
水素透過性を有する固体である、ペロブスカイト型混合導電性セラミックスや水素吸蔵合金を用いて電極を構成することによって、電極過電圧を小さくすることができる。
(もっと読む)
生体構造認識部位を提示する中空ナノ粒子およびその生産方法、並びにその利用
精製が簡便で、標的となる細胞または組織に細胞導入物質を効率よく導入することが可能な中空ナノ粒子を提供する。 本発明にかかる中空ナノ粒子は、粒子形成能を有するタンパク質により形成され、生体構造認識部位を表面に提示している。この生体構造認識部位は、上記タンパク質のN末端・C末端の双方に設けられており、それぞれの生体構造認識部位が認識する生体由来の化学構造は異なる。その少なくとも一方は、標的細胞・組織に特異的な構造を認識する標的構造認識部位であり、何れか一方は、中空ナノ粒子を特異的に認識する識別部位として機能することが好ましい。例えば、標的構造認識部位としては、B型肝炎ウィルスの肝細胞認識部位を、識別部位としては各種タグ配列等を挙げることができる。 (もっと読む)
ロボットの駆動方法
形状が複雑で自己遮蔽の多い動作物の動作にもとづき、見まね(非接触的方法)によりロボットを駆動する方法を提供することにある。ロボットの複数の画像データと事前収集動作指令とを対応付けて画像対応動作指令記憶手段11に記憶する。ロボットを動作させるために、動作物に所望の動作を行わせ、その際に動作物の画像データを時系列でロボット動作用画像データとして取得する。画像データ特定及び動作指令発生装置14は、ロボット動作用画像データに含まれる画像データに対応する画像データを画像対応動作指令記憶手段11に記憶している複数の画像データから時系列で特定し、特定した画像データに対応する事前収集動作指令を動作指令としてロボットに与えてロボットを駆動する。これによりロボットは、動作物の形状の複雑さや自己遮蔽を解消して見まねにより動作する。 (もっと読む)
流体シリンダを用いたアクチュエータ及びその制御方法並びにチョークバルブ装置
簡単な構成でエアシリンダ等の流体シリンダに剛性を与えことができる流体シリンダを用いたアクチュエータ及びその制御方法並びにチョークバルブ装置を提供する。アクチュエータは、流体シリンダ1、第1のチョークバルブ装置3及び第2のチョークバルブ装置5とを備えている。流体シリンダ1は、シリンダ室7と、シリンダ室7を第1のチャンバ9と第2のチャンバ11とに仕切るようにシリンダ室7内にスライド自在に配置されたピストン12とを有する。第1のチョークバルブ装置3を流体圧源と第1のチャンバ9との間に配置し、第2のチョークバルブ装置5を流体圧源と第2のチャンバ11との間に配置する。チョークバルブ装置3及び5は、それぞれバルブの開度が可変できる排出バルブ機構を備えている。 (もっと読む)
高脂血症・高アルブミン血症モデル動物
高脂血症や高アルブミン血症の予防・治療薬の開発に有用な、特に老齢(加齢)期(ヒトにおいては中高年)に高脂血症や高アルブミン血症を発症する、高脂血症及び/又は高アルブミン血症モデル動物を提供するものである。レギュカルチン遺伝子が導入され、レギュカルチンを過剰発現するトランスジェニックラット(ホモ体)を、高脂血症及び/又は高アルブミン血症の症状を呈する老齢(加齢)期、例えば36週齢まで飼育することにより、高脂血症及び/又は高アルブミン血症モデル動物を得る。このモデル動物は、血清アルブミン、HDL−コレステロール及びトリグリセリド濃度が有意にかつ著しく上昇する上に、骨病態をも呈する。 (もっと読む)
1,701 - 1,710 / 1,734
[ Back to top ]