
Fターム[2B043EA26]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 作物の状態 (37) | 作物の存在又は状態 (25) | 未刈地と既刈地又は未植地と既植地 (11)
Fターム[2B043EA26]に分類される特許
1 - 11 / 11
苗移植機
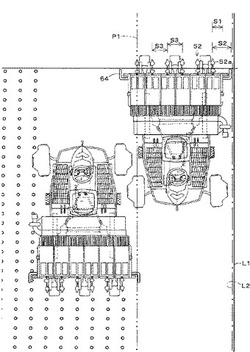
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
芝刈機

【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
水田除草ロボット
【課題】本発明は、水田の稲列の末端で稲列を踏み潰さずにUターン反転することができる、水田の稲列を認識して自走する小型の水田除草ロボットを提供する。
【解決手段】本発明の水田除草ロボットは、2つの矩形の第一台座1及び第二台座2を突き合わせて枢支し、互いに起伏回転可能に連結した台座ユニット3と、前記第一台座1下面に設けた垂直軸(図示省略)に水平回転可能に連結された第一ターンテーブル4と、前記第二台座2下面に設けた垂直軸(図示省略)に水平回転可能に連結された第二ターンテーブル5と、前記第一ターンテーブル4に固定され、クローラ6を備えた第一走行ユニット7と、前記第二ターンテーブル5に固定され、クローラ6を備えた第二走行ユニット8と、前記台座ユニット3上に載置され、図示しないエンジン発電機、制御基板、カメラ、電源装置を内蔵した制御ユニット9とから構成されている。
(もっと読む)
コンバインの自動方向制御装置
【課題】オペレータが疎植圃場を刈り取っていることしっかり認識し、刈取走行方向が乱れようとすると直ちに手動操向によって走行方向を修正出来るようにする。
【解決手段】穀稈センサ1a,1bが未刈穀稈に接触して刈取部13の位置を検出し、その検出結果で走行方向を制御する制御装置2を設けたコンバインの自動刈取方向制御において、従来の植付間隔よりも広い疎植を判定する手段S22を設け、刈取開始後に疎植を判定すれば、オペレータに疎植された圃場での刈取中であることを知らせる手段S23を設けたことを特徴とするコンバインの自動方向制御装置とした。
(もっと読む)
走行車両
【課題】多条植えの乗用型作業機が、たとえ湿田走行中であっても、前進の場合は所望の走行経路で旋回が可能となるとともに、後進の場合については、安定して後進旋回することができる走行車両を提供する。
【解決手段】走行車両は、走行車体(2)と、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回連動機構(A)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回連動機構(A)により断続的に入/切する周期を変更する制御装置(163)を備えて構成され、上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を連続的に入として制御するものである。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
作業車
【課題】直進状態と旋回状態とに切り換え自在な操向手段を備えて、直線状の作業経路に沿って走行する直進走行と前記直線状の作業経路の終端部から次回の直線状の作業経路に向けて予め定めた設定走行パターンにて走行する経路変更用走行とを繰り返す形態で作業を行う作業車に関する。
【解決手段】作業経路変更用走行を自動で行うように前記操向手段101を切り換え制御する作業行程切換制御を実行する自動旋回制御手段102と、前記作業経路変更用走行の開始を指令する手動操作式の自動旋回指令手段SWとが備えられ、前記自動旋回制御手段102が、前記自動旋回指令手段SWの指令に基づいて前記作業行程切換制御を実行するように構成する。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
作業車の画像処理装置
【課題】 列状に並んだ物体を撮影して線分を設定する作業車の画像処理装置において、物体の色相に近い色相を備えた外乱の影響をできるだけ小さくする。
【解決手段】 物体の並び方向と交差する複数の分割線E1により、画像を複数の領域B1に分割する。領域B1の各々において、物体の色相を備えた画素を候補画素として抽出する。領域B1の各々において、複数の候補画素のうち、最上位から所定個数の候補画素G1,G2,G3,G4を選択する。選択された所定個数の候補画素G1,G2,G3,G4に沿って線分を設定する。
(もっと読む)
田植機の画像処理装置
【課題】 田植機の画像処理装置において、田面に植え付けられた苗と同じような色相を
備えたものが田面に映っても、これを削除(無視)して、田面に植え付けられた苗に相当
する画素を判断することができるように構成する。
【解決手段】 撮影された画像の画素において、赤成分、緑成分及び青成分、彩度Sに基
づいて、田面に植え付けられた苗に相当する画素を判断する。
(もっと読む)
1 - 11 / 11
[ Back to top ]