
Fターム[2B043EE05]の内容
農業機械一般(操向) (6,001) | 報知装置の構成、配置又は取付け (86) | 報知装置の構成 (25) | 音又は言葉 (9)
Fターム[2B043EE05]に分類される特許
1 - 9 / 9
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
乗用型苗移植機

【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
農薬散布用ホバークラフト
【課題】特別なテクニックを要せずに、ラダーの向きを変え推進力を加えることで容易に離岸することができる農薬散布用ホバークラフトを提供する。
【解決手段】ホバークラフト本体5と、進行方向と進行速度の他、種々の設定を所望に遠隔制御する無線信号を送信すると共に、CCDカメラ12によって映し出される船艇前方の映像信号を受信しモニタ31に現出する他、畦道や土手等の障害物に対する接近状態を感知した際、超音波センサー装置11が送信する警告信号を受信し、スピーカー30から警告音を発生させるコントローラ26の組み合わせから構成されており、農薬散布用ホバークラフト1は、ホバークラフト本体5の船首6近傍上甲板及び船尾7近傍上甲板に設けられた固定具17間にグラスファィバー製の離岸ロッド16が右舷8縁及び左舷9縁より側方に円弧状膨出して張架されていることに特徴する。
(もっと読む)
田植機
【課題】 次回の走行指標を田面に形成するマーカを機体横方向に突出した作用姿勢と機体側に後退した格納姿勢とに切換え可能に装備した田植機において、マーカを畦などの障害物に不用意にぶつけてしまうことを未然に回避できるようにする。
【解決手段】 走行機体3が障害物Bに接近することを検知する検知手段38を備え、障害物Bへの設定以上の接近が検知されると作用姿勢のマーカ12を自動的に格納姿勢に切換えるマーカ自動切換え手段を備えてある。
(もっと読む)
作業車両
【課題】音声による運転制御により安全性を高めた作業車両を提供することである。
【解決手段】音声認識装置121は、機体Tが停止している場合又はトラクタに連結した作業機Rが作動停止している場合に、これらを動作開始する操作指令がマイク122又は送受信装置120からあると、スピーカ124などで動作開始をする旨を報知した後、機体Tの走行開始出力又は作業機Rの動作出力を実施し、動いている機体Tを停止させる操作指令又は機体Tに連結した作業機Rの作動停止指令に対しては、機体Tの走行停止又は作業機Rの作動停止用の出力をした後、音声による返答を音声認識装置121を経由して返答内容(機体Tの走行停止又は作業機の作動停止の完了)を報知する構成とした。機体T又は作業機Rが間違って走行又は作動しないときなどには安全確保できる。また、それらの場合に機体T又は作業機Rが迅速に停止する側に動くため安全である。
(もっと読む)
畦成形機
【課題】従来圃場隅部の作業を行なう作業機は、圃場隅部における畦方向への成形圧力が減少するため堅固な畦を形成できない課題がある。
【課題手段】装着フレーム1から斜め後方へ固定されて延設される支持フレーム2と、支持フレーム2に設けられるとともに、装着フレーム1との距離を伸縮させる水平移動手段4によって支持フレーム2に沿って装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である1つの水平回動軸54を中心に水平回動手段6又は自由回動によって水平方向に回動可能である畦成形作業部5と、畦成形作業部5の前側に設けられる前部案内輪7と、畦成形作業部5の後側に設けられる後部案内輪8とを有し、支持フレーム2に沿って装着フレーム1に対して遠近移動する畦成形作業部5の水平回動軸54が、常に前部案内輪7と後部案内輪8との間に位置するように設けられる畦成形機による。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
水田作業機の指標形成マーカ操作構造
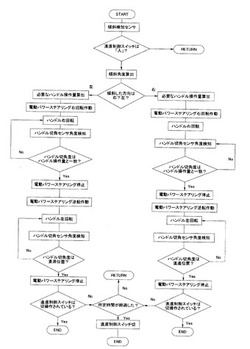
【課題】 次の作業行程における走行基準となる指標を田面に形成する左右一対の指標形成マーカをそれぞれ出退操作可能に備えるとともに、各指標形成マーカの突出作動指令を出すマーカ選択手段を備えた水田作業機のマーカ操作構造において、マーカ選択操作を誤っても速やかに修正操作を行って作業に移行することができるようにする。
【解決手段】 前回のマーカ突出作動方向を記憶する記憶手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向との相違を判断する判断手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向とが同一であることが判断されると作動する報知手段とを備えてある。
(もっと読む)
1 - 9 / 9
[ Back to top ]