
Fターム[2B076ED21]の内容
収穫機本体(機枠、駆動) (12,770) | 制御対象 (1,228) | 表示、警報装置 (189)
Fターム[2B076ED21]の下位に属するFターム
光によるもの (100)
音(音声も含む)によるもの (17)
Fターム[2B076ED21]に分類される特許
21 - 40 / 72
作業機の表示装置における言語書き換えシステム
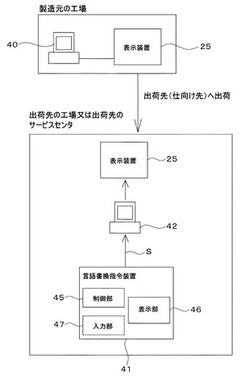
【課題】作業機を使用する場所等に対応して表示装置で表示する国言語を適切に表示することができるように、表示装置が具備する国言語を適切に書き換えすることができるようにする。
【解決手段】作業機1の情報を表示する表示装置25に対して、情報を複数の国言語にて表示可能となるように複数の国言語を国言語群として書き込む言語書込装置40と、国言語群が書き込みされた表示装置25に対して国言語群内の国言語のうち少なくとも1つを他の言語に書き換える書き換え指令を出力する言語書換指令装置41と、この言語書換指令装置41の書き換え指令に基づいて国言語群内の国言語を他の国言語に書き換える言語書換装置42とを備えている。
(もっと読む)
作業機械

【課題】コモンレール120の燃料温度が異常に上昇するのを抑制し、作業効率が低下するのを防止できるようにした作業機械を提供するものである。
【解決手段】コモンレール120付きディーゼルエンジン70を搭載し、ディーゼルエンジン70の出力によって作業部2,5,8を駆動するように構成してなる作業機械において、コモンレール120の燃料温度を検出する燃料温度センサ321と、作業部2,5,8の過負荷運転状況を警報するオーバーロード警報器327を備え、オーバーロード警報器327からオーバーロード警報が出力される作業部2,5,8の過負荷基準値を多段階に設定したものである。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
脱穀機
【課題】ストローラックへ多量の穀粒が送出され、ストローラックから穀粒が飛散して、送塵口から排出されることを防ぐと共に、ストローラックから漏下した穀粒が二番スクリューを介して処理ロータに送出され、処理ロータに送出された穀粒が再びストローラックに漏下するという循環をコンバインの機内で繰り返すことを防ぐ。
【解決手段】クリンプ網15の後端部下方に穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及びチャフシーブ18の動作を制御して、チャフシーブ18から漏下する穀粒量を増加させて、チャフシーブ18からストローラック19へ送出される穀粒の量を低減させる構成とした。
(もっと読む)
脱穀機
【課題】排塵口から排出される穀粒量が、排塵口から排出されることが許容される穀粒量を超過することを未然に防ぐ。
【解決手段】扱室10から排塵口33に至る穀粒の通流経路において、排塵口33よりも上流に位置する処理室13の排出口13eに穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及び処理胴弁13aの動作を制御し、前記処理室13への稈及び穀粒の送出量及び排出口13eから排出される穀粒量を低減させる構成とした。
(もっと読む)
脱穀機
【課題】グレンシーブから多量の穀粒が横溢し、横溢した穀粒が二番スクリューを介して処理ロータに送出され、処理ロータに送出された穀粒が再びグレンシーブに漏下するという循環をコンバインの機内で繰り返すことを防ぐ。
【解決手段】グレンシーブ20の後端下方に穀粒量検出センサ34を設け、該穀粒量検出センサ34にて検出された検出結果に基づいて、送塵弁10a及び調整網94の動作を制御し、またシーブ板の動作を制御して、グレンシーブ20から漏下する穀粒量を増加させ、グレンシーブ20の後端から多量の穀粒が横溢することを防ぐ構成とした。
(もっと読む)
コンバインの自動方向制御装置
【課題】オペレータが疎植圃場を刈り取っていることしっかり認識し、刈取走行方向が乱れようとすると直ちに手動操向によって走行方向を修正出来るようにする。
【解決手段】穀稈センサ1a,1bが未刈穀稈に接触して刈取部13の位置を検出し、その検出結果で走行方向を制御する制御装置2を設けたコンバインの自動刈取方向制御において、従来の植付間隔よりも広い疎植を判定する手段S22を設け、刈取開始後に疎植を判定すれば、オペレータに疎植された圃場での刈取中であることを知らせる手段S23を設けたことを特徴とするコンバインの自動方向制御装置とした。
(もっと読む)
コンバイン
【課題】搭乗運転部を有した機体の前方に刈取部を備え、機体に警音器を備えたコンバインにおいて、より最適な警音器を備えたコンバインを提供する。
【解決手段】搭乗運転部12を有した機体の前方に刈取部2を備え、搭乗運転部12の下部を構成するデッキフレームの前面部9bのうち、刈取部2の機体左右方向の幅よりも外側に位置する部分に、警音器10を設けてコンバインを構成した。
(もっと読む)
作業機械用の制御装置
【課題】書き込み可能な不揮発性の記憶手段の個数の削減によって構成の簡素化を図りコスト低減を図ることが可能となる作業機械用の制御装置を提供する。
【解決手段】通信手段TUを介して互いに通信可能な複数の制御部が機械各部に分散配備され、複数の制御部のうちのいずれかの制御部が書き込み可能な不揮発性の記憶手段を備える情報管理用の制御部H1として構成され、情報管理用の制御部H1が、電源投入により起動した後に、通信手段TUを介して記憶手段50に記憶している制御管理用情報を記憶対象制御部H2〜H6に送信する制御管理用情報分配処理を実行するように構成され、記憶対象制御部H2〜H6の夫々が、電源投入により起動した後に、情報管理用の制御部H1から通信手段TUを介して送信される自己についての制御管理用情報を受信する制御管理用情報取得処理を実行する。
(もっと読む)
コンバインの脱穀・刈取クラッチ制御装置
【課題】従来のものでは、スイッチ操作を前後左右に揺動操作する脱穀・刈取クラッチレバーによりおこなっているため、限られた運転席まわりのスペースの中で他のレバーやスイッチの操作性や操作頻度を考慮してレイアウトするために妥協を強いられていた。
また、作業中でも前処理を上昇させた非刈取時は自動的に前処理部が停止するように制御しているので、脱穀・刈取クラッチレバーを操作する頻度は少ないにもかかわらずコストが掛かっていた。
【解決手段】脱穀クラッチ(32)および刈取クラッチ(47)の状態が作業不能状態であることを表示する切インジケータ(79)と、手扱ぎ作業可能状態であることを表示する脱穀インジケータ(77)と、刈取作業可能状態であることを表示する刈取インジケータ(76)とを、脱穀・刈取クラッチ操作手段(75)の側方で且つ脱穀・刈取クラッチ操作手段(75)の操作方向と同一方向に並べて配置した。
(もっと読む)
脱穀機
【課題】刈取部にて刈取った穀桿を脱穀部に搬送している状態にあるのか(刈取モード)、手刈りした穀桿を搬送している状態にあるのか(手扱モードという)、又は穀桿の脱穀部への搬送を行っていない状態にあるのか(待機モード)を判断し、各モードに応じて、穀桿から分離した穀粒及び塵埃を選別する選別部での選別精度を機械的及び自動的に調整し、ロス量を低減させる。
【解決手段】排桿量に応じて機械的に回動する回動レバー52に、サーボモータ70を連結する。刈取スイッチ、脱穀スイッチ、穀桿センサ及び速度センサから出力された信号をコントローラに入力して、入力された信号に基づいて、刈取モード、手扱モード又は待機モードを判断する。コントローラは、各モードに応じてサーボモータ70を作動させて、機械的及び自動的に回動レバー52を回動させる構成とした。
(もっと読む)
コンバイン
【課題】コンバインにおいて運転席のオペレータが刈取穀稈の分草を確認しながらスイッチパネルを見えるようにし、操作性の向上によって刈取作業の能率を高める。
【解決手段】操縦部(3)の後部中央に座席(3a)を、前側部にフロント操作ボックス(3b)を、左側部にサイド操作ボックス(3c)を設ける。サイド操作ボックス(3c)の主変速レバー(15)の前方への最大操作位置よりも前方で且つ座席(3a)に座った状態でのオペレータが刈取搬送部(7)の左側端部の分草体(22)を視認する左斜め前方に位置するようにスイッチパネル(13)を配設し、スイッチパネル(13)に自動制御用のスイッチ群(SW2,SW3、SW4、SW5,SW7,SW8、SW10)を設ける。
(もっと読む)
コンバインの安全装置
【課題】コンバインと補助作業者の位置を平面的な地図上に表示することでコンバインと補助作業者の距離を認識し易くして作業の安全性を向上させる。
【解決手段】コンバイン11に備えたGPS受信装置2の地図情報で自機11の位置をディプレイ10の平面地図上に表示すると共に、コンバイン11の周辺の補助作業者16を感知してその補助作業者16までの距離を計測する計測手段Aからの情報で前記ディスプレイ10の平面地図上に補助作業者16を重ねて表示し、コンバイン11と補助作業者16が所定距離に接近すると警報すべくしてコンバインの安全装置を構成した。
(もっと読む)
コンバイン
【課題】変速レバーを操作する際における機体前方の確認をおろそかにすることなく、変速レバーの変速位置を容易に確認できるコンバインを実現する。
【解決手段】コンバインにおいて、サイドパネル60の前部に、前後に長い変速レバーガイド60aを形成し、変速レバーガイド60aを上下に連通させて、機体の走行速度を変速する変速レバー61を前後揺動自在に支持し、変速レバーガイド60aの前端がフロントパネル66の後端より前に位置するように、サイドパネル60に変速レバーガイド60aを形成する。
(もっと読む)
農作業機
【課題】農作業機において、各作動部の機能調整作業を安全に行えるようにする。
【解決手段】農作業機における各種モードの情報を表示するための液晶ディスプレイ75と、前記情報を液晶ディスプレイ75に表示させる制御を実行するコントローラ130と、エンジンから各作動部に向かう動力伝達を継断操作するためのクラッチレバーとを備える。コントローラ130は、クラッチレバーを切り操作した場合には、実行中の他のモードから、各作動部の機能調整を行う調整モードに移行し、液晶ディスプレイ75に調整モードの情報を表示させる。調整モードの実行中にクラッチレバーを入り操作した場合には、調整モードから移行前の元のモードに復帰し、液晶ディスプレイ75の画面表示を、調整モードの情報から元のモードの情報に遷移させる。
(もっと読む)
コンバイン
【課題】刈取り作業中に穀粒タンク内に貯留される穀粒の量を安価な構成で検出すると共に、刈取り作業中に穀粒タンク内に貯留される穀粒の収穫量に基づいて未刈り行程における穀粒の収穫量を予想し、後工程である乾燥機に効率的に張り込んで穀粒を乾燥できるようにする。
【解決手段】コンバイン1の刈取り走行状態を検出する検出手段22,24,25,26,27,31L,31Rと、刈取り走行中の穀粒タンク9内における穀粒の貯留量を検出する検出手段S1〜S4の検出値に基づいて、刈取り走行距離に対応する単位刈取り面積あたりの穀粒の収穫量を算出する演算手段21と、この演算手段21により算出した単位刈取り面積あたりの穀粒の収穫量を表示する表示手段15を設けた。
(もっと読む)
コンバイン
【課題】 走行用変速装置を人為操作自在な変速操作具によって変速操作するものでありながら、第一作業状態での作業も第二作業状態での作業も適切な作業走行速度で行いやすいコンバインを提供する。
【解決手段】 複数の植付け条の植立穀稈を刈取り処理する刈取り処理幅を有した刈取り部と、走行用変速装置を変速操作する人為操作自在な変速操作具51と、認識手段61とを備えている。認識手段61は、備え走行用変速装置の変速状態が、複数の植付け条よりも少数の植付け条の植立穀稈を刈取り部に導入する第一作業状態の作業走行速度を現出する変速状態であるか、あるいは複数の植付け条の植立穀稈を刈取り部に導入する第二作業状態の作業走行速度を現出する変速状態であるかを操縦者に認識させる。
(もっと読む)
農作業機
【課題】キーを不正に入手される等により、盗難警報設定時間内に農作業機が盗難されそうになった場合、遠隔地にいてもその発生を検知することができ、即時に追跡等が行えるために盗難を未然に防止できる農作業機を提供する。
【解決手段】携帯端末20と通信する通信手段32を備える農作業機30において、機体の位置情報を検知する位置情報検知手段(GPS)38と、エンジンの始動状態を検知するエンジン始動状態検知手段46と、前記携帯端末20から受け付けた盗難警報設定時間情報に基づいて盗難警報設定時間を設定し、エンジンが始動したときに、盗難警報設定時間内であるか否かを判断する設定時間制御手段34とを備え、該設定時間制御手段34で盗難警報設定時間内であると判断された場合、そのとき検知された前記位置情報を前記携帯端末20に送信することとした。
(もっと読む)
コンバインのフラッシャーランプ取付構造
【課題】方向指示器用のフラッシャーランプを、省スペース且つ少ない部材で、機体側に取り付け可能なコンバインを提供すること課題としている。
【解決手段】機体側方位置にある脱穀部9上部を覆う天板11上にフラッシャーランプ19a,19bと、脱穀部9内の送塵量を調節する送塵量調節レバー14とを設けたコンバインにおいて、上記送塵量調節レバー14基端側を支持する部材又は送塵寮調節レバー14の少なくとも一部を覆うレバーケース16にフラッシャーランプ19a,19bを取り付ける。
(もっと読む)
コンバインの走行警報装置
【課題】排出オーガからの籾の漏出を防止する走行警報装置を備えたコンバインを提供することを課題とする。
【解決手段】穀粒を収容するグレンンタンク4と、グレンタンク4内の穀粒を外部に排出する排出オーガ7とを備えたコンバインにおいて、機体の走行を検出する走行検出部36と、上記穀粒の排出を検出する排出検出部17と、走行検出部36及び排出検出部17の検出動作に起因してオペレータに機体が走行していることを警報する警報装置43とを設ける。
(もっと読む)
21 - 40 / 72
[ Back to top ]