
Fターム[2B304LC02]の内容
Fターム[2B304LC02]に分類される特許
1 - 17 / 17
作業車両
【課題】
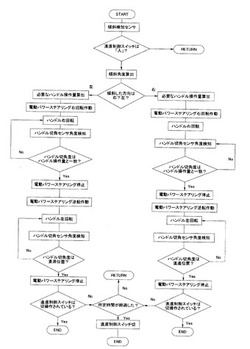
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
乗用移植機

【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
乗用草刈機
【課題】地上高を一定に保持可能なモアデッキを備える乗用草刈機を提供する。
【解決手段】電動ローンモア10が、モアブレードと、モアブレードを上方および側方から覆うモアデッキ15と、モアデッキ15を懸架するとともに、進行方向に延設されるメインフレーム18と、メインフレーム18の前部に取り付けられ、走行面の起伏を検出する前輪11と、メインフレーム18の後端と連結したシャーシ27と、前輪の検出した走行面の起伏に応じて、メインフレーム18をシャーシ27に対して上下回動可能とする回動筒73とを備える。
(もっと読む)
トラクタの耕深自動制御装置
【課題】既耕地と未耕地との間に生じた凹部に片側の車輪が落ち込み機体が傾斜した場合に、耕深が一時的に深くなり耕耘跡に盛土が形成される不都合を解消する。
【解決手段】トラクタの制御装置8は、走行機体1に連結した耕耘装置3を、その深さセンサ15の検出値が深さ設定器17によって設定される耕深目標値となるように所定の不感帯をもって昇降制御する耕深自動制御と、走行機体1の傾斜に伴って耕耘装置3が左右に傾いたとき、耕耘装置3が所定の左右傾斜角に保たれるように耕耘装置3を傾斜制御する傾斜自動制御とを行うにあたり、走行機体1の傾斜に伴って耕耘装置3が左右に傾いて傾斜自動制御が行われる際には、走行機体1の傾斜が発生する前の深さセンサ15の検出値を耕深目標値として耕深自動制御を行う。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
農用作業車
【課題】農用作業車のローリング方向の重心が偏り対地作業装置が圃上面と平行となるべく設定し辛い傾斜地においても、簡便に対地作業装置の姿勢を設定しかつ地表面の凹凸を均平に修正できる農用作業車を提供する。
【解決手段】トラクタ1とトラクタ1にローリング自在に連結されたロータリ耕耘装置14との目標とする相対角度を設定する設定手段と、前記設定手段の設定値を記憶する記憶装置65と、トラクタ1のローリング角の変化速度を検出する角速度センサ19と、トラクタ1の対地角度を検出する傾斜センサ16と、前記目標相対角度を算出する制御装置60と、ロータリ耕耘装置14の姿勢を制御する制御装置60とを具備する農用作業車であって、前記角速度センサ19の検出値が所定の範囲内の場合における目標相対角度を算出する制御装置60は、前記トラクタ1の対地角度の検出値が基準原点値を中心に傾斜方向が異なる場合には各々別個の値を算出する。
(もっと読む)
作業車の姿勢制御装置
【課題】 走行装置に対する車体の姿勢が大きく変化するおそれが少ない場合には車体の姿勢変更速度を遅くして乗り心地が低下することを防止しながらも、走行装置に対する車体の姿勢が大きく変化するような場合には迅速に姿勢変更操作を行うことが可能な作業車の姿勢制御装置を提供する。
【解決手段】 車体における傾斜角変更方向に離れた一端側箇所及び他端側箇所夫々を走行装置の接地部に対して昇降自在な複数の駆動手段を備え、傾斜角検出手段の検出情報に基づいて、車体の水平基準面に対する傾斜角が設定傾斜角に維持されるように駆動手段を制御する姿勢変更制御を実行するように構成され、走行装置に対する車体の姿勢が大きく変化すると予測される姿勢変動タイミングでないことが判別されると片側駆動形式の姿勢変更操作を実行し、且つ、姿勢変動タイミングであることが判別されると両側駆動形式の姿勢変更操作を実行する。
(もっと読む)
作業車の姿勢制御装置
【課題】 目標傾斜角を所望の傾斜角に調整する操作を煩わしさの少ない状態で容易に行うことが可能となる作業車の姿勢制御装置を提供する。
【解決手段】 走行装置に対する車体の傾斜姿勢を変更させる手動操作式の姿勢変更指令手段100が備えられ、姿勢制御手段400が、姿勢変更制御の実行中において、姿勢変更指令手段にて指令されると、その指令に基づいて走行装置に対する車体の傾斜姿勢を傾斜角変更方向一方側又は他方側へ変更すべく姿勢変更操作手段の作動を制御し、且つ、指令が終了すると、その終了時において傾斜角検出手段23にて検出される車体の水平基準面に対する傾斜角を目標傾斜角として設定し、その後はその設定した目標傾斜角に基づいて前記姿勢変更操作手段100の作動を制御するように構成されている。
(もっと読む)
耕深制御装置
【課題】車輌本体の姿勢に拘わらず、耕耘機の自動耕深制御の安定化を図り得る構造簡単な耕深制御装置を提供する。
【解決手段】リヤカバー624の回動角度に基づき、車輌本体50に対して昇降可能に連結された耕耘機400の検出耕深位置hDを設定耕深位置hRに追従させる自動耕深制御を行うように構成された耕深制御装置は、車輌本体50の検出傾斜角θW又はθLと閾値傾斜角θW’又はθL’との傾斜偏差ΔθW又はΔθLの大きさに基づき自動耕深制御における制御ゲインKpを変更するように構成されている。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘機が地面から離れて非耕耘位置に移動して1行程の耕耘作業を終了するときに、最終的に形成される盛り土及び耕耘跡穴を均すように、耕耘機の姿勢制御を実行できる農作業機の耕耘制御装置を提供する。
【解決手段】作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、耕耘機を昇降動する昇降制御アクチュエータと、耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、耕耘機の耕耘爪の耕耘深さを設定する耕耘深さ設定器と、昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、耕耘制御手段は、リヤカバーが耕耘位置から最閉位置に移動するまでの間は耕耘機をゆっくり上昇させて、耕耘爪による耕土の盛り上がりや耕耘跡穴を小さくし、リヤカバーが離陸した高さから旋回時の高さまでは急激に上昇させるパターンで制御するものである。
(もっと読む)
除草機
【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
作業車輌における傾斜自動制御装置
【課題】 作業部を上昇させて走行機体を転回させた後、作業部を下降させて作業再開した際に、安定した傾斜角度調整を開始させて、安定した姿勢の作業部によって正確で仕上りのきれいな作業面が得られる作業車輌における傾斜自動制御装置を提供する。
【解決手段】 ステップ111で作業部が上昇状態であると判断されると傾斜センサと角速度センサの出力に基づく傾斜制御を休止させる。その後、作業部が上昇状態でないことが確認され、ステップ112で作業部下降後設定時間TAが経過したことが確認され、ステップ113、114で傾斜センサと角速度センサが出力安定状態であることが確認された場合に初めて傾斜センサと角速度センサの出力に基づく傾斜制御を開始させる。
(もっと読む)
薬剤散布作業車
【課題】十字レバーなどのレバー66L,Rを用いながら車体の左右にある散布ブーム44,44の操作を同時に行うことができ、また伸縮動作をする場合でも片手で楽に散布ブーム44,44を操作できる操作性、作業性が向上した薬液散布作業車を提供すること。
【解決手段】薬液散布用の車体左右の散布ブーム44,44をそれぞれ上下方向に動かすためにレバー66L,66Rを上下方向に操作し、左右のブーム44,44をそれぞれ左右方向に伸縮操作するためにレバー66L,Rをそれぞれ左右方向に操作させる第一モードと左右の散布ブーム44,44の両方を同時に作動させる第二モードを切替ボタン65で切替可能に構成した薬剤散布作業車である。
(もっと読む)
農作業機の作業部昇降装置
【課題】 苗植機の場合に、畦際での苗植付後に土壌面や耕盤面等の傾斜で、後進操作をしないのに、走行クラッチの切り状態等では車体が後退することがある。又、昇り坂等の走行でクラッチを切るときも同様に後退することがある。このようなときは、作業部の一部、特に設置部が土壌面に突き込まれて大きな抵抗を受けて破損することがある。
【解決手段】 後進センサが走行車輪2の後進回転を検出することによって対地作業装置3を上昇制御することを特徴とする農作業機の作業部昇降装置の構成とする。車体の後側に装着した作業装置3は、下降した姿勢で対地作業を行う。この車体の走行車輪2が後進回転すると、後進センサによって検出され、この検出によって作業装置3が車体に対して非作業位置に上昇される。そして、後進操作だけでは作業装置3は上昇されず、車体の後進が行われて始めて上昇する。
(もっと読む)
1 - 17 / 17
[ Back to top ]