
Fターム[2B304QB30]の内容
Fターム[2B304QB30]に分類される特許
1 - 18 / 18
作業機
【課題】複数の表示装置を備えていても、表示装置の種類(機種)や仕様の変更を容易に行うことができる作業機を提供する。
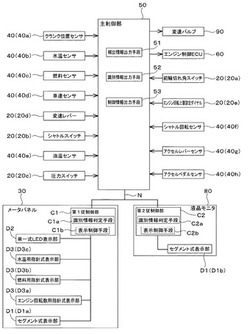
【解決手段】トラクタ2は、検出器で検出した状態を表示可能な複数の表示装置(メータパネル30及び液晶モニタ80)と、該複数の表示装置がCAN通信網Nを介して接続されると共に検出器が接続され、且つ検出器で検出された状態を示す検出情報を複数の表示装置に出力するメインECU50と、を備える。メインECU50は、検出情報を表示させる表示装置を識別するための識別情報を出力する識別情報出力手段52と、該検出情報を出力する検出情報出力手段51とを有する。複数の表示装置は、識別情報によって指定されたときに、検出情報出力手段51によって出力された検出情報を表示する。
(もっと読む)
薬液散布作業車両

【課題】旋回時又は旋回終了時に旋回外側のサイドブームを自動的に上昇又は下降させる制御を安全性を考慮して可能にした薬剤散布作業車両を提供すること。
【解決手段】GPS受信機81から得られる車速又は車輪12又は13の回転数から得られる車速により適切な薬液散布量となるように薬液タンク18からの薬液流量を流量制御モータ10により流量調節弁73の開度を調整する。このとき車輪12及び/又は13の操舵角の検知により自動的に旋回外側のサイドブーム44の上昇を行い、また前記車速が所定値以上になると旋回外側のサイドブーム44の自動上昇を行わない制御を行うことで、高速走行時にサイドブーム44の破損等の不具合を防止できる。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、タッチスクリーンであるタッチパネル部41に表示された操作表示画面上の操作スイッチ表示に触れて操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチ表示の操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作表示画面は、作業機の機種毎に変更して、異なる作業機の操作を可能とする。
(もっと読む)
農作業機のリモコンシステム
【課題】トラクタに装着して農作業を行う作業機のためのリモコンの操作ボックスを部品の交換なしに異なる作業機に対応できる農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機と、操作パネル100、101、102上の操作スイッチを操作する操作ボックス10とを備え、作業機は、当該作業機に設けられた出力機器30と、操作スイッチの操作による操作信号を受信しこれに基づき出力機器30を制御する制御部21とを有し、操作ボックス10は、作業機の異なる機種に対応した複数の操作パネル100、101、102を有し、複数の操作パネル100、101、102は、操作ボックス10を構成する筐体の異なる面に設置されている。
(もっと読む)
作業機のロール角度検出構造
【課題】旋回走行中の変速により発生する加速度に起因して、ロール角度検出用のセンサの出力に基づいて演算した機体のロール角度が信頼性の低いものになるのを防止する。
【解決手段】機体のロール角度に応じて出力が変化するロール角度検出用のセンサ77と、このセンサ77の出力に基づいて機体のロール角度を演算するロール角度演算手段40Daを備え、ロール角度演算手段40Daが、旋回情報出力手段Aの出力に基づいて機体の旋回走行を検知している間は、センサ77に働く遠心力を演算する遠心力演算処理と、この遠心力演算処理で得た値に基づいてセンサ77の出力を補正する補正処理を行い、この補正処理後のセンサ77の出力に基づいて機体のロール角度を演算し、旋回情報出力手段Aと変速情報出力手段Bの出力に基づいて旋回走行中の変速を検知している間は、センサ77の出力を取り込まない取込中断処理を行うように構成してある。
(もっと読む)
農作業機用無線受信制御装置及び農作業機用リモコン装置
【課題】無線受信制御装置の電源スイッチを入れたときにいきなり農作業機の動作が実行される可能性をなくし、安全性を高めることができる農作業機用無線受信制御装置及び農作業機用リモコン装置を提供する。
【解決手段】農作業機用無線受信制御装置70は、走行機体の後部に装着される農作業機に設けられ、農作業機の動作を指令する操作指令を無線信号によって指令するリモコン装置60からの信号を受信し、リモコン装置に返信の信号を送る通信手段と、通信手段によって受信された信号に従って農作業機の作動を制御する制御手段を備え、電源スイッチをオンしたときに、リモコン装置からの信号が受信圏内に存在するときには、自動的に制御手段への電力の供給を遮断する電源停止制御手段200aを備える。
(もっと読む)
作業機の傾斜角度検出構造
【課題】機体の傾斜角度が激しく変動する場合にも、機体の傾斜角を応答性良く良好に検出できるようにする。
【解決手段】重力加速度に対する出力が機体の傾斜角度に応じて変化するように機体に装備した加速度センサ77と、加速度センサ77の出力を機体の傾斜角度に換算する換算手段40bを備えて、機体の傾斜角度を検出する傾斜角度検出手段76を構成する。
(もっと読む)
農作業機用リモコン装置
【課題】電源を入れたと同時に、操作者が意図しない農作業機の動作が実行される可能性をなくすことができる農作業機用リモコン装置を提供する。
【解決手段】農作業機用リモコン装置60は、電源スイッチ210がオン状態のとき、指令信号を搬送するための電波を送信し、各指令スイッチがオンされたとき指令信号データに基づいて指令信号を電波に載せて送信する通信手段223と、各指令スイッチがオンされたとき指令信号データを記憶手段222から読み込み、指令信号データを通信手段223に送る制御手段221を備え、通信手段223は、電源スイッチ210が入れられた立ち上げ時には、各指令スイッチを操作するときに出力する電波の強度よりも小さい強度で出力する制御を行う出力制御手段226を備える。
(もっと読む)
作業車両搭載用制御装置
【課題】作業車両1に各制御手段210,213,281,282を組み付けた後に、個別の制御プログラムをそれぞれ対象となる制御手段210,213,281,282に書き込む場合において、適式な制御プログラムを各制御手段210,213,281,282に伝送できるようにする。
【解決手段】通信バス280に接続された外部端末290にて、識別子毎のプログラムを、識別子に対応した制御手段210,213,281,282にインストールするように構成されており、外部端末280と各制御プログラムとに保安用の固有コードを有する。インストール前に予め、外部端末280の固有コードと各制御プログラムの固有コードとを照合し、合致した制御プログラムを、これに対応する制御手段210,213,281,282にインストールするように構成する。
(もっと読む)
耕起作業機の耕深制御構造
【課題】エンジン回転数を耕深制御での指標とせずに、耕起装置の耕起深さを設定手段により設定した制御目標耕深に維持できるようにする。
【解決手段】走行車体1に対して耕起装置3を昇降駆動する駆動手段41、耕起装置3の制御目標耕深を設定する設定手段56、耕起装置3の対車体高さを検出する検出手段54、検出手段54の出力が設定手段56の出力に対応するよう駆動手段41の作動を制御する制御手段25A、エンジン6の燃料噴射量を演算する演算手段62、及び、検出手段54の出力が設定手段56の出力に対応したときの演算手段62の出力を制御基準値として記憶する記憶手段25Cを備え、制御手段25Aが、制御基準値と演算手段62の出力に基づいて制御目標耕深を補正し、検出手段54の出力が補正後の制御目標耕深に対応するよう駆動手段41の作動を制御する。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタの各種設定操作の繁雑さを解消する。
【解決手段】走行ポジション(P1)では、前記車体の走行形態を「二駆」状態とし、且つ作業機昇降制御を切に設定し、耕耘ポジション(P4)では、前記車体の走行形態を「四駆」状態とし、且つ前記作業機昇降制御を入りに設定すると共に、前輪増速制御、オートリフト制御またはオートブレーキ制御を夫れ夫れ単独で選択できる設定具(9)を設け、前記設定器(9)を前記耕耘ポジション(P4)に操作すると、該設定具(9)により選択設定された前輪増速制御、オートリフト制御、又はオートブレーキ制御を強制的に入とするように構成し、かつ前記走行ポジション(P1)に切り替えたときの前記作業機昇降制御を切に維持した状態で「四駆」を設定可能に設けた。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
農作業車両
【課題】本発明は、畦を乗り越える圃場出入時に作業機の上昇等の複雑な操作を自動化してオペレータが操縦操作に専念出来るようにすることで、安全な圃場の出入が行えるようにすること課題とする。
【解決手段】農作業車両の操縦席6の近傍に、圃場内への侵入時に操作する圃場出入スイッチ59を設け、走行速度の設定と、PTO軸停止と、作業機の上昇、及びエンジン回転数上昇をあらかじめ設定可能な構成とし、前記圃場出入スイッチ59を入り状態にすることで、前記設定している走行速度の低速化と、PTO軸停止と、作業機の上昇、及びエンジン回転上昇を自動に制御する構成を備えたことを特徴とする農作業車の構成とする。また、圃場出入スイッチ59を変速レバー18或いはステアリングハンドル8に設けたことを特徴とする農作業車両の構成とする。
(もっと読む)
コンバインの姿勢制御装置
【課題】機体の左右姿勢を制御する姿勢制御装置を備えたコンバインにおいて、姿勢制御装置の目標傾斜角を設定する設定器であるダイヤルを他部品の兼用化により廃止してコストの低減を図る。
【解決手段】機体の左右姿勢が設定傾斜となるようにクローラ走行装置16L,16Rを昇降制御する自動傾斜制御と、該自動傾斜制御に優先して手動操作具65によりクローラ走行装置16L,16Rを昇降制御する手動傾斜制御とを可能にする制御手段41,61とを備え、前記自動傾斜制御での作業走行中に手動操作具65の操作を行った時は、その操作を終了した時点における機体の左右姿勢を設定傾斜とする傾斜設定モードとして自動傾斜制御に復帰せしめると共に、前記傾斜設定モードでの作業走行中に自動傾斜制御の起動手段62を操作すると、傾斜設定モードから機体の水平姿勢を設定傾斜とする水平設定モードへ自動的に切換えて自動傾斜制御を継続するように構成した。
(もっと読む)
作業車両
【課題】傾斜センサや加速度センサは高価な備品であり、できればそのような高価な備品を使用しないで作業機を適切に操縦できる走行車両を提供すること。
【解決手段】一対の後輪3,3の上部を覆う左右後部フェンダ21,21またはその近傍にそれぞれGPSアンテナ20L,20Rを装着し、また走行車両の前方のカビネットの天井部にもGPSアンテナ20Fを装着し、アンテナ20L,20Rにより、またはアンテナ20L,20R,20Fにより走行車両の左右方向又は前後方向の傾斜度合いをGPSとの送受信で検出でき、作業機の水平制御などを行うので、その制御の精度が優れたものとなり、高価な角速度センサをはじめ、作業機姿勢制御用の各種センサが不要になる。
(もっと読む)
作業車両
【課題】必要な場合はリフトアームを作動させることができ、なおかつ不用意にリフトアームが作動しないようにしてオペレータの安全を図ったバック側外部作業機を着脱自在に装着した作業車両を提供すること。
【解決手段】バックホウ9を装着して行う作業時には、3点リンク機構30を機体から取り外しているもののリフトアーム38はそのままであり、不意にリフトアーム38が作動すると各種部材を破損させるおそれがある。そこで後ろ向きのシート8でオペレータが作業中には必ず下げ側ソレノイド62aをオンにして、上げ側ソレノイド61aが、たとえオンになっても昇降シリンダ41内に作動油が流入せずにリフトアーム38を上昇させないようにする。
(もっと読む)
作業車両の制御装置
【課題】従来正確な負荷変動が検知できなかったので、エンジンの回転数と燃料噴射量からトルクを演算して、該トルクの変化状態を作業時において検知し、そのトルク変化が所定の形状となるとスリップしたと判断し、このスリップが生じないように制御する。
【解決手段】電子制御式燃料噴射装置を具備し、サイクル毎の噴射量を演算する手段を備えたディーゼルエンジンを搭載した作業車両において、該エンジンのクランク軸25の回転を検知する手段33と、作業車両に装着した作業機7と、燃料噴射装置の噴射量制御手段と、作業機の昇降を制御する手段と、作業車両速度制御手段とを備え、燃料噴射量とエンジン回転数によりエンジントルクを演算し、予め任意に設定した所定時間内に急激なトルクの上昇の後に急激なトルクの低下があり、そのトルクが任意に設定した時間持続すると車輪がスリップしたと判断する。
(もっと読む)
1 - 18 / 18
[ Back to top ]