
Fターム[2B382MA37]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動の対象又は制御手法 (166) | 速度又は負荷の変化 (14) | 前処理部又は刈取装置の移動又は回動速度 (9)
Fターム[2B382MA37]に分類される特許
1 - 9 / 9
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
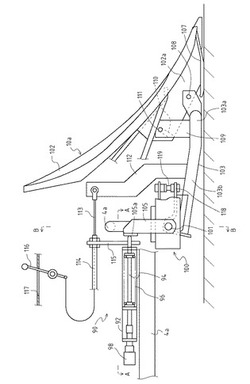
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバイン

【課題】本発明は、コンバインの刈取部を自動制御で昇降するようにした構成で、自動で昇降させる範囲の設定を容易にすることを課題とする。
【解決手段】車台11の前部に昇降可能に設ける刈取前処理装置13の地上高を検出する刈取高さ検出手段2を設け、該刈取高さ検出手段2の検出する地上高に基づいて刈高さ制御処理装置38で刈取前処理装置13を制御下限位置から制御上限位置の範囲で昇降制御するコンバインにおいて、刈高さ制御処理装置38を調整記憶モードに切換えると、刈取前処理装置13の昇降移動率を監視し、昇降移動を一定時間停止した位置を制御下限位置と制御上限位置として記憶すべくしたことを特徴とするコンバインの刈取昇降制御装置とする。
(もっと読む)
コンバインの刈取装置昇降油圧制御装置
【課題】本発明では、昇降操作レバー等の手元操作で刈取装置の下降速度を任意に変更出来るようにすると共に、昇降操作レバー等の操作に応じて直ちに下降速度を変化させる応答性を良好にすることを課題とする。
【解決手段】油圧ポンプ12から刈取装置1を昇降する刈取昇降シリンダ37へオイルを供給する刈取油路70に刈取電磁切換弁36を設けると共に該刈取電磁切換弁36の戻り側に下げ速度調整用の電磁可変絞り弁35を設け、この電磁可変絞り弁35を刈取電磁切換弁36のオフ時に最大開放状態に保持すべく制御する構成とした。
(もっと読む)
コンバインの刈取部昇降用油圧回路
【課題】 刈取部の昇降速度を変速可能な油圧回路であって、低速上昇時の上昇速度において刈取部にかかる負荷によって生じる変動を抑制することができ、エンジンの低速回転時にも刈取部の低速上昇が可能であり、しかも、低速昇降に関してコンバイン本機へのマッチングが容易な、油圧回路を提供する。
【解決手段】 コンバインの刈取部を昇降させる油圧シリンダー2を、オイルタンク3から油圧ポンプ4を介して送られる圧力油によって駆動するための油圧回路であって、油圧ポンプ4から油圧シリンダー2に圧力油を供給するための供給油路と、供給油路に接続され、流路断面積の異なるドレン流量制限用絞りを通る複数の油路を切り換え選択可能なドレン油路と、供給油路に接続され、該供給油路の油圧を所定圧力に制御するための圧力制御弁16と、を有し、前記供給油路は、開閉可能な切換弁7と、切換弁7と並列に接続された供給油量制限用絞り9とを有する。
(もっと読む)
コンバイン
【課題】穀稈搬送装置の駆動速度の変更によって、穀稈搬送装置によって搬送中の穀稈の搬送姿勢が乱れるのを防止できるものでありながら、穀稈引起装置穀稈引起速度だけを速くすることができたり、穀稈搬送装置だけを駆動できるようにしたコンバインを提供するものである。
【解決手段】コンバインにおいて、穀稈引起装置223を駆動する引起駆動用電動モータ90と、刈刃装置222を駆動する刈刃駆動用電動モータ91と、穀稈搬送装置224を駆動する搬送駆動用電動モータ92とを備え、穀稈引起装置223と刈刃装置222と穀稈搬送装置224とをその各々の電動モータ90,91,92によって駆動するように構成したものである。
(もっと読む)
コンバイン
【課題】穀稈を刈取り後方上部へ移送する刈取部の下降位置近傍部での動作を小さくし、微調整時に刈取部が圃場面に突っ込むような不具合を少なくして、コンバインの作業能率を高める。
【解決手段】刈取部4を昇降操作する上げ操作スイッチ20a及び下げ操作スイッチ20bを操向レバー18に設ける。そして、上げ操作スイッチ20a及び下げ操作スイッチ20bの操作により、刈取部4昇降駆動用のアクチュエータ14側へ所定時間の上昇出力又は下降出力を出力する制御装置17を設ける。そして、設定した位置よりも下側の位置において刈取部4を下降させるときの下降出力時間を、前記設定した位置よりも上側の位置において刈取部4を下降させるときの下降出力時間よりも短い時間に規制する。
(もっと読む)
コンバインにおける前処理部の昇降制御装置
【課題】コンバインを運転操縦するオペレータの好みや作業形態に応じて、前処理部の昇降制御速度を容易に切替ることができる昇降制御装置を提供する。
【解決手段】穀稈を刈取る前処理部16を油圧シリンダ33を介して昇降させる昇降操作具17を備えたコンバインにおいて、前記昇降操作具17の操作位置に応じて前処理部16の昇降速度を変更する可変速昇降制御と、前処理部16を一定の高速で昇降作動させる一定高速昇降制御とに切り替え可能に構成すると共に、当該昇降操作具17の把持部に両昇降制御を切り替える切替手段43を設けた。
(もっと読む)
コンバイン
【課題】刈取装置の圃場へ突っ込みを確実に防止する。
【解決手段】走行機体1に昇降制御可能に支持した刈取装置7と、該刈取装置の対地高さを検出する刈高さセンサ21と、該刈取装置の走行機体に対する昇降位置検出を検出する昇降位置センサ22と、該刈高さセンサ21と昇降位置センサ22の検出値に基づいて刈取装置を昇降装置18により昇降制御するコントローラ30とを備えたコンバインにおいて、走行機体が前後方向へ傾動したときの加速度を検出する加速度センサ25と、走行機体が前後方向へ傾動したときの傾動速度を検出する速度センサ26と、走行機体の水平基準面に対する前後傾斜角を検出する前後傾斜角センサ27とを走行機体に設け、前記制御手段で刈高さセンサと昇降位置センサの検出値とともに、加速度センサと速度センサと前後傾斜角センサの各検出値に基づいて刈取装置を昇降装置により昇降制御可能に構成した。
(もっと読む)
コンバインにおける刈取前処理装置の昇降・駆動制御装置
【課題】手動モードに切り換えた場合において、刈取前処理装置を目標高さにセットすることを容易にする。
【解決手段】走行機体に対して昇降駆動手段を介して昇降駆動する刈取前処理装置の上昇行程では、第1の設定高さ位置にて刈取クラッチをONからOFFに切換え、刈取前処理装置の下降行程では、前記第1設定高さ位置より低い第2の設定高さ位置にて刈取クラッチをOFFからONに切換えるように制御する昇降・駆動制御装置と、前記昇降・駆動制御を自動モードと手動モードとに切り換えるモード切換手段とを備え、モード切換手段を手動モードに切り換えた場合において(S12)、少なくとも刈取前処理装置の下降速度を前記所定速度V1より遅い微速速度V2にて細かく下降操作する(S27)ための微調整用切換手段を設けた。
(もっと読む)
1 - 9 / 9
[ Back to top ]