
Fターム[2C150EC08]の内容
Fターム[2C150EC08]に分類される特許
1 - 11 / 11
遠隔操作のオートバイ模型
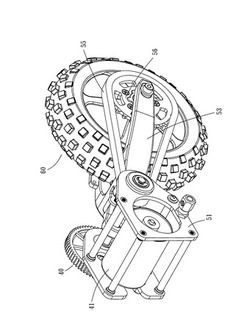
【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
歩行ロボット

【課題】 歩行ロボットのピッチ方向股関節及び膝関節の駆動構造を改善することで、制御メカニズムが簡単であり、歩行時に脚から発生する慣性力を減少させ、より小さい出力でより自然な歩行が可能な歩行ロボットを提供する。
【解決手段】 胴体及び前記胴体に連結される複数個の脚を含む歩行ロボットにおいて、前記各脚のうち少なくとも一つの脚は、大腿リンクと、前記大腿リンクの下部に設けられる下腿リンクと、前記胴体と前記大腿リンクとを連結し、前記胴体に対して前記大腿リンクをピッチ方向に回動させるピッチ方向股関節と、前記大腿リンクと前記下腿リンクとを連結し、前記大腿リンクに対して前記下腿リンクをピッチ方向に回動させる膝関節とを含み、前記ピッチ方向股関節と前記膝関節は、互いに連動されて一つの連動アクチュエーターによって駆動されることを特徴とする歩行ロボットを構成する。
(もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
ジュークボックス玩具
【課題】音楽を純粋に楽しむことができるとともに視覚的にも楽しむことができ、団塊の世代の大人が若い頃を思い出して心を癒すことができるジュークボックス玩具を提供すること。
【解決手段】ディスク5を着脱可能に保持したディスクホルダー6と、ディスクホルダー6に保持されたディスク5をピックアップし、ターンテーブル8に移動させるピックアップアーム7と、ターンテーブル8上に移動するアーム9とを設けるとともに、上記ディスクホルダー6、ピックアップアーム7、アーム9をそれぞれ駆動する駆動機構D1、D2、D3を設け、該駆動機構D1、D2、D3は制御部100によって制御され、音楽が再生される前にディスク5をピックアップアーム7でピックアップしてターンテーブル8上に移動させた後、アーム9をディスク5の上方に移動させ、音楽の再生が終わると、ディスク5をターンテーブル8からディスクホルダー6に戻すようにした。
(もっと読む)
玩具用クラッチ
【課題】クラッチ機構内の歯車の回動を安定させ、不要な接触抵抗を無くす。
【解決手段】入力歯車であるドライブギア3と、ドライブギア3に噛合可能なピニオンギア6と、ドライブギア3の中心軸線を中心に一方向及び他方向に回動可能に設けられ、ピニオンギア6をドライブギア3と噛合状態に支持し、当該ドライブギア3の回動方向に応じた方向に回動する板状部材5と、ドライブギア3の中心軸又はその延長線を中心に回動可能な出力体であるホイール4とを備え、前記ホイール4には、板状部材5が一方向へ回動する際に、前記ピニオンギア6を係止して当該ホイール4を当該板状部材5と同じ方向に回動させる第一の係止部41と、板状部材5が他方向へ回動する際に、当該ホイール4の回転抵抗によって板状部材5を係止して前記ピニオンギア6を空転状態に保持する第二の係止部42とが設けられている。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第2リンク19を、2つのリンク部材を間隙を空けて相対させ、その上端部を第1リンク17で両持ちで支持し、下端部に略ボックス形状の第2のハウジング19cを一体形成する構成とし、屈曲時に、第1リンク17の第1フレームの下端部を進入させる構成とし、第2のハウジング19cの上端部に傾斜面を設ける構成とした。
(もっと読む)
筋力トレーニング装置
【課題】第1の関節軸と第2の関節軸とを結ぶリンクの長さの調整に伴って、ワイヤの長さが自動的に調整され、トルク発生源のトルク制御によってワイヤの初期張力を安定して再現することができ、筋力トレーニングを効果的に行うことができるようにする。
【解決手段】ベース部に固定された第1関節軸と、第1関節軸の周りに回転可能で長さが調節可能な第1リンクに設けられた第2関節軸と、第2関節軸の周りに回転可能な第2リンクとを有し、第2リンクは、第2関節軸と同軸の第2プーリと、第2プーリを正転及び逆転方向に駆動する2系統のワイヤとによって、第1関節軸と同軸に設けられた第1プーリにより駆動され、第1プーリは、相互に分離した正転方向の系統のワイヤを巻き付けるプーリと逆転方向の系統のワイヤを巻き付けるプーリとから成り、プーリの角度関係を変化させることによってワイヤの長さを調整する。
(もっと読む)
走行玩具
【課題】2つの走行態様を取り得る安価な走行玩具を提供すること。
【解決手段】モータの正逆転を切り替えるための切替え手段と、ボディ下側に取り付けられた車輪付きの台座フレームとを備え、モータの動力を台座フレームの車輪に伝達してその車輪を回転駆動させる車輪駆動機構と、モータの動力を遊星歯車機構を介して台座フレームに伝達して当該台座フレームの向きを変えて車輪の操舵を行う操舵機構とが設けられ、遊星歯車機構は、モータの動力によって回転動作する太陽歯車と、台座フレーム側に固定された遊星キャリヤと、遊星キャリヤに支持され太陽歯車に噛合し当該太陽歯車が回転動作した際に当該太陽歯車の回りを公転する遊星歯車とから構成され、遊星歯車は、ボディ側に固定された弧状のラック歯車に噛合し、台座フレームは、モータの回転方向に応じて向きを変えるように構成されている。
(もっと読む)
走行玩具
【課題】 左右の脚の位相差を変えることができる走行玩具を提供すること。
【解決手段】 モータ動力でもって左右の脚を前後に揺動動作させて走行する走行玩具において、正逆回転可能なモータと、前記モータが一方向に回転した際に前記左右の脚を第1の位相差をもって揺動動作させるための第1のクラッチ機構と、前記モータが他方向に回転した際に前記左右の脚を第2の位相差をもって前記第1のクラッチ機構におけると同じ運足方向に揺動動作させるための第2のクラッチ機構と、前記第1のクラッチ機構と前記第2のクラッチ機構とを前記モータの回転方向に応じて選択的に作動させるクラッチ切換機構とを備えることを特徴とする。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
2足歩行玩具
【課題】簡単な構造で組立も容易な構造で以て2足歩行玩具を提供すること。
【解決手段】尾部を有する自走式の2足歩行玩具において、尾部が左右方向に揺動自在に構成されると共に左右方向の複数位置で接地可能に構成され、接地した尾部の左右方向位置に応じて自動的に舵取りを行うように構成されていることを特徴とする。
(もっと読む)
1 - 11 / 11
[ Back to top ]