
Fターム[2C150EF05]の内容
玩具 (16,863) | 感知、検出 (1,002) | 障害物又は壁等の物体 (23) | 走行路又は面等の範囲 (8)
Fターム[2C150EF05]に分類される特許
1 - 8 / 8
鉄道車両玩具
【課題】簡易な壁面または次両目車両へ衝突または接触することによって前進と後進の進行方向を逆転させる機能を有する事を特徴とする鉄道車両玩具を提供する。
【解決手段】本発明は以上のような構造である、1駆動モーター及び前後進逆転機付き先頭車両に、3前後進逆転機連動用の切り替スイッチの組み合わせを実現した前後進逆転機能を設けたことを特徴とする。
(もっと読む)
姿勢制御付き無人二輪車

【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
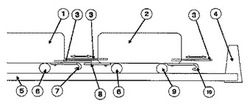
コースパーツ、及び移動玩具システム。
【課題】移動玩具が移動の際にコースに設定されたデータを適切に読み取れるようにする。
【解決手段】移動玩具10が移動する走行面CPB1〜CPB16を有するコース60を構成するコースパーツCP1〜CP16であって、コースの走行面又は壁面63L、63R、64L、64Rの第1の領域CPBR1には、移動玩具がデータを読み取るための複数のデータマーカDM1〜DMnが設けられ、走行面又は壁面の第2の領域CPBL1には、データをサンプリングするためのクロックを移動玩具が読み取るための複数のクロックマーカCM1〜CM16が設けられる。このとき、複数のデータマーカは、第1の領域において、第1の方向D1に沿って設けられ、第1の方向に対して垂直方向を第2の方向D2とした場合に、複数のクロックマーカは、第1の領域の第2の方向に設けられた第2の領域において、第1の方向に沿って設けられる。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
ロボット装置制御システム、ロボット装置及びロボット装置制御方法
【課題】容易に所望の動きで動かす。
【解決手段】ロボット装置11への直接入力としての回転楕円体状筐体20の振られ方を分析してその振られ方に応じた動きパターンデータPDをパーソナルコンピュータ12の記憶部42から読み出して、読み出した動きパターンデータPDに応じた動きで動くようにロボット装置11の6個の可動部のそれぞれを駆動制御するようにしたことにより、ユーザに対してロボット装置11を持って振らせるだけで動きパターンデータPDを設定することができ、かくして、ロボット装置11自体をユーザの所望の動きで容易に動かすことができる。
(もっと読む)
ビデオゲームシステムのための表示の調整方法
本発明は、ビデオゲームシステム(1、3)のための表示の調整方法(49)に関する。本システムは、車両(1)の姿勢のセンサ(31)を有する遠隔操縦車両(1)と、表示ユニットを備え、サーキット(57)上の車両(1)を遠隔操縦するのに用いられる電子エンティティ(3)とを備える。本方法は、センサ(31)を介して車両(1)の瞬間姿勢を動的に取得するステップと、センサ(31)から出力される瞬間姿勢の値を基にしてサーキットの少なくとも1つの傾斜パラメータを動的に推定するステップと、サーキットの単数(複数)の傾斜パラメータの推定値に応じて電子エンティティの表示(49)を調整するステップとを含むことを特徴とする方法。  (もっと読む)
(もっと読む)
多点接地型足部支持機構及びそれを備えた2足歩行ロボットの脚部並びにその制御構造
【課題】既存の2足歩行ロボット等の脚部の足底に容易に取付可能で、足底支持部の可動爪部が受動的に路面等の接地面の凹凸にならって確実に摺動することができ、固定爪部の接地や可動爪部の移動量を検出して足底支持部の運動を制動することにより、段差等がある接地面でも、速やか、かつ、確実に足底を多点支持することができ、転倒を回避できる信頼性に優れる多点接地型足部支持機構の提供。
【解決手段】歩行ロボットの脚部の足底に配設される基部と、基部を多点支持する足底支持部と、を備えた多点接地型足部支持機構であって、足底支持部が、基部の底面より下方に下端部が突出して配設され接地時にそれぞれ独立して上方に移動する摺動自在に保持された3以上の可動爪部と、各々の可動爪部の移動量を検出する移動量検出センサ部と、移動量検出センサ部で検出した可動爪部の移動量に基づいて全ての可動爪部の運動を制動するロック機構と、を備えている。
(もっと読む)
玩具用サーキット及び玩具用車両走行システム
【課題】リモコン操作技術の優劣に関係なく、よい成績をとることが可能な玩具用車両走行システムを提供することを目的とする。
【解決手段】玩具用車両が走行する道路に、幅方向にわたって白又は明るい灰色から、黒又は暗い灰色に連続的に或いは段階的に変化する階調で表された第1の位置情報が描かれた玩具用サーキット101と、玩具用サーキット101に設置された、第2の位置情報としての玩具用車両の走行方向の位置を知らせるための赤外線光源1〜13と、第1の位置情報の検出手段と、第2の位置情報の検出手段と、タイヤの回転数の検出手段と、第1の位置情報、第2の位置情報、及びタイヤの回転数から求めた走行距離に応じてステアリング操作及び速度制御を行う制御手段とを備えた玩具用車両とを有することを特徴とする。
(もっと読む)
1 - 8 / 8
[ Back to top ]