
Fターム[2C150EF32]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 超音波 (11)
Fターム[2C150EF32]に分類される特許
1 - 11 / 11
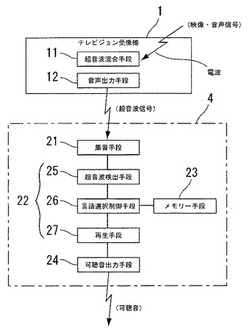
超音波映像リンキングシステム付き玩具
【課題】 テレビ放送やビデオソフト、さらにパソコン等でのキャラクター映像等に連動させて、キャラクター玩具からの所要の言語等の出力、光源の点灯、点滅、可動部の動作等を得ることができる超音波映像リンキングシステム付き玩具を得る。
【解決手段】 テレビ等での互いに同期した映像と音声を得る映像・音声発生源に、低音域の聞こえない超音波信号を混在させる超音波混合手段11と、超音波信号が混在した音声信号を出力する音声出力手段12を備える。さらに、人形等の気象玩具4に、音声に混在する超音波信号を集音する集音手段21と、その超音波信号を検出する超音波検出手段25と、超音波信号による通知信号に基づき選択される所要の言語を収納するメモリー手段23から選択する言語選択制御手段26と、選択した言語を可聴音として再生する再生手段27と、その再生した可聴音を出力する可聴音出力手段24等を設ける。
(もっと読む)
プロペラにより浮遊する玩具

【課題】 屋内等においてホバリング動作を自動的に行うことができるプロペラにより浮遊する玩具(ヘリコプタ玩具)を得る。
【解決手段】 リモコン操作によって空中浮揚させることが可能なヘリコプタ玩具1は、無線操縦によりリモコン制御部により操縦される。そのヘリコプタ玩具本体2は、上下、左右、前後の最大6方向での障害物までの距離を測定する距離センサ(赤外線センサまたは超音波センサ)11〜16を備える。さらに、距離センサによる測定結果に基づいて所定位置での空中静止状態を維持するためのホバリング制御部20を備える。
(もっと読む)
超音波利用電子玩具
【課題】使用者が物体をアクティブに操作し、その操作の仕方などを競ったり、工夫したりすることによって、使用者に対して興味を持たせるようにした超音波利用電子玩具を構成する。
【解決手段】物体(43)を収容または載置する物体存在部に隣接して、超音波の反射体で囲まれた空間部(42)を構成する。信号処理部(40)は空間部(42)に設けた超音波センサ(23)を用いて超音波信号の送受信を繰り返し行い、異なる送信周期回における受信信号同士を比較して受信信号の変化の有無によって物体(43)の操作状態を検知し、その結果信号を出力する。
(もっと読む)
ロボット及びその制御方法
【課題】簡略な構造で軽い優れたロボットアームを備える新たなロボットを提供する。
【解決手段】ロボット本体と、前記ロボット本体に設けられ、前記ロボット本体に対して回転可能な第1肩関節と、前記第1肩関節にその一端側が設けられ、前記第1肩関節と共に前記ロボット本体に対して回転可能な支持部と、前記支持部の他端側に設けられ、前記支持部に対して回転可能な第2肩関節と、前記第2肩関節にその一端側が設けられ、前記第2肩関節と共に前記支持部に対して回転可能なアーム部と、を備えることを特徴とするロボット。
(もっと読む)
移動玩具及びそれを用いた移動玩具セット
【目的】 走行面の通電状態を検知して走行する軌跡を複雑且つ任意に設定できると共に、容易な手段で遠隔操作できる移動玩具を提供する。
【構成】 玩具本体2に装備したモータ3の駆動によって可動する一対の移動体5を備えた移動玩具1であって、前記玩具本体2下部に少なくとも3つの素子からなる通電検知手段6を有してなる。各素子間の通電状態によって両方又は片方の移動体5を選択的に可動させる。外部からの音声を検知する音声検知手段7を有する。音声を検知することで前記モータ3の駆動を制御する。音声発生手段8を有する。前記移動玩具1と、発音具とからなる移動玩具セット。前記移動玩具1と、水付着具とからなる移動玩具セット。
(もっと読む)
動作玩具
【課題】回路構成が簡素で、かつ、誤動作の少ない動作玩具を提供すること。
【解決手段】特定周波数帯の発音を行う外部発音手段と、前記外部発音手段によって動作制御される動作体とを備え、前記動作体には、前記外部発音手段の音に対して共鳴する共鳴器と、前記共鳴器に付設され且つ外部音をピックアップしアナログ信号に変換して出力するマイクロフォンと、前記マイクロフォンから出力された前記アナログ信号をデジタル信号に変換するA/D変換手段と、前記A/D変換手段からの前記デジタル信号が前記外部発音手段の信号か否かを判定し且つ該デジタル信号が該外部発音手段の信号である場合に前記動作体の動作を制御するコントローラとを備える。
(もっと読む)
移動体、及びその制御方法
【課題】音源に対して確実に近づくことができる移動体、及びその制御方法を提供すること。
【解決手段】
本発明の一態様にかかる移動体は、目標停止位置まで自律移動する移動体100であって、移動体100の外部で発生した音の前記移動体に向かう方向を特定するマイクロフォンアレイ121と、移動体100が移動する領域に応じて記憶されている地図データにおいて、音源の候補となる音源候補対象の位置を記憶する音源候補対象記憶部52と、音源の方向と、音源候補対象の位置とに基づいて、音源の位置を推定する音源位置推定手段12と、推定された音源の位置から目標停止位置を決定する停止位置決定手段13と、移動体の現在位置から目標停止位置まで移動体100を移動させる駆動制御部16と、を備えるものである。
(もっと読む)
無線操縦走行玩具用の送信機と受信機並びに無線操縦走行玩具
【課題】送信機と受信機のいずれにおいても玩具とは別に発電機を携帯する必要のない送信機と受信機並びに無線操縦走行玩具を提供する。
【解決手段】起電力生成と信号発生とを兼ね備えた起電力信号生成部と、高周波信号を発生する高周波信号生成部と、高周波を放射する空中線とを有して、電池を使用することなく信号と起電力を発生させて信号を送信可能である。また、受信機は、駆動力を発生させる駆動力生成部と、駆動力を起電力に変換する起電力生成部と、制御信号を受信する制御信号受信部と、高周波を放射する空中線とを有して、電池を使用することなく駆動力と起電力を発生させて信号を受信可能である。
(もっと読む)
音声認識装置および音声認識装置を備えたロボット
【課題】 音声認識の頭切れを防止するとともに、テンポのよい会話を実現することができる音声認識装置および音声認識装置を備えたロボットを提供する。
【解決手段】 会話の台詞を組み立てる制御部53と、台詞に基づいて出力音声信号を生成する音声合成部55と、出力音声信号に基づいて出力音声を出力するスピーカ18と、ユーザ音声を少なくとも含む音声を入力信号に変換するマイクロフォン14と、入力信号から出力音声に係る信号成分を除去して入力音声信号を生成する出力音声除去部57と、入力音声信号に基づいてユーザ音声を認識し、認識結果を制御部53に出力する音声認識部59とを備え、制御部53,61が、台詞に基づいて、音声認識部59によるユーザ音声の認識開始のタイミングを、出力音声の出力開始から所定時間後、かつ、出力音声の出力終了前に制御することを特徴とする。
(もっと読む)
ロボットおよび音声認識装置ならびにその方法
【課題】音声認識の精度を向上させることにより、誤動作の発生を低下させることのできるロボットおよび音声認識装置ならびにその方法を提供することを目的とする。
【解決手段】マイクロフォン14と、マイクロフォン14から入力された音声を認識する音声認識部50と、ロボット本体周辺の人物を検知する人物検知部51aと、人物検知部51aにより人物が検知された場合に、音声認識部50による音声認識結果を有効とする音声認識採否判断部53と、音声認識採否判断部53により音声認識結果が有効とされた場合に、該音声認識結果に対応する応答動作を実行する応答動作実行部53とを具備するロボットを提供する。
(もっと読む)
ストーリー出力システム、ロボット装置およびストーリー出力方法
【課題】 ユーザが容易にストーリーのバリエーションを楽しめるようにする。
【解決手段】 ストーリー出力システム100は、空間中または2次元平面上に配置されるとともに、それぞれストーリーに登場し得る登場物に対応付けられた複数の物体の配置関係を取得する取得部106と、複数の物体の配置関係を、複数の物体にそれぞれ対応づけられた登場物同士の関係に反映させたストーリーを出力する出力処理部124とを含む。
(もっと読む)
1 - 11 / 11
[ Back to top ]