
Fターム[2C150FA24]の内容
Fターム[2C150FA24]の下位に属するFターム
Fターム[2C150FA24]に分類される特許
1 - 14 / 14
ラジコン受信装置
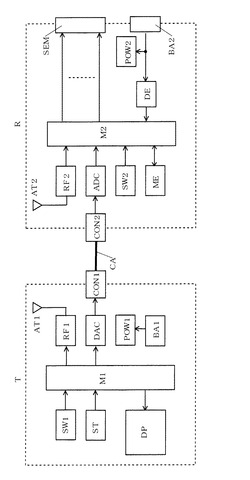
【課題】電池のフェールセーフ電圧の設定手段を備えた受信装置において、フェールセーフ電圧の設定及び設定変更を容易に行うこと。
【解決手段】送信装置TのディスプレイDPにフェールセーフ電圧のメニューを表示し、そのメニューから受信装置Rに搭載する電池BA2のフェールセーフ電圧を選択して送信スイッチSW1をオンにすると、フェールセーフ電圧は、ダイレクト・サーボ・コントローラケーブルCAを介して受信装置Rへ供給される。フェールセーフ電圧の取込み用のスイッチSW2をオンにすると、フェールセーフ電圧は、メモリMEに記憶される。即ちフェールセーフ電圧がメモリMEに設定される。
(もっと読む)
ヘリコプタ玩具

【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
モータの制御装置及びそれを備えた転動ロボット
【課題】筐体の着地時における衝撃を抑制することができるとともに、筐体の動作パターンを増加させることができるモータの制御装置及びそれを備えた転動ロボットを提供する。
【解決手段】演算装置は、メインモータの回転角度を検出する回転角度検出手段の検出結果に基づいて、メインモータの回転速度を算出する回転速度変換器を備え、操作量演算部50は、筐体の角速度を検出する角速度センサの検出結果に基づいて、筐体の傾斜角を算出する傾斜角算出手段53と、筐体の現在の傾斜角と、目標値設定部で設定された目標傾斜角との傾斜角偏差信号に基づいて、傾斜角偏差に応じた出力信号を算出する傾斜角設定手段54と、メインモータの現在の回転速度と、目標値設定部で設定された目標回転速度との回転速度偏差信号に基づいて、回転速度偏差に応じた回転速度設定手段56とを備えていることを特徴とする。
(もっと読む)
移動体による眼力トレーニング装置
【課題】 自宅や事務所の就寝時や休憩時に簡単に、低コストで自然に眼力の訓練ができるようにする。
【解決手段】 天井から紐に吊るした玩具飛行体を床上に位置する観察者が観察する。玩具飛行体は紐に吊るされた状態で推力と重力と揚力の動的な釣り合いで定まる旋回飛行をし、その後玩具飛行体は、次第に速度を速め旋回半径が次第に増大し、床面からの高度が次第に高くなり、その後次第に速度が遅くなり旋回半径が次第に小さくなり、床面からの高度が次第に低くなり、更に、紐が玩具飛行体内に次第に巻き取られ、紐が次第に短くなり、玩具飛行体は床面からの高度が次第に高くなり、紐の長さに拘束されて旋回半径が次第に小さくなり、次に紐が玩具飛行体内から巻き戻され、紐が次第に長くなり、床面からの高度が次第に低くなり、紐の長さに比例して旋回半径がやや大きくなり、当該玩具飛行体が前記旋回飛行を繰り返し、観察者が目で該玩具飛行体を観察する。
(もっと読む)
揺動玩具
【課題】揺動部材の揺動を滑らかに再現できる揺動玩具を提供する。
【解決手段】一対のアーム部材が揺動する揺動玩具である。一対のアーム部材を互いに可動的に連結し、一方のアーム部材に供給された回動駆動力を他方のアーム部材に伝達するように配置された連結手段を備える。一対のアーム部材のそれぞれの下端部には錘がある。一対のアーム部材の少なくとも一方から枝分かれし、その先端部が回動するように配置された枝アーム部材を有する。枝アーム部材の先端部には永久磁石がある。永久磁石と磁気的に相互に作用する電磁コイルがある。電磁コイルが励磁されていない状態で、一対のアーム部材は互いに重量バランスが均衡した中立位置にある。電磁コイルが永久磁石に断続的に磁気的に作用することで、一対のアーム部材は中立位置と付勢位置とを往復する。
(もっと読む)
鉄道模型用車両の車輪の清掃装置
【課題】鉄道模型用車両において、車輪に付着している異物を、容易かつ確実に取り除き得るようにする。
【解決手段】鉄道模型用車両の車輪に付着している異物を取り除くための清掃装置であって、車両を押し付けて移動させることによりそのを回転させ、車輪を全周に亘って清掃するために用意された、擦り付け清掃部16を本体に具備し、車両を押し付けて移動させても回転させることができないか或いは回転し難い動力車輪12を清掃するために、動力車輪を接触させて通電状態として回転させる通電用接点部25を、電力を車両に取り入れる通電車輪の位置に合わせて上記本体に具備する。
(もっと読む)
鉄道模型車輌及びその制御装置
【課題】 モーターを停止させつつ前照灯などを点灯させ、車輌を交換した場合にもランプを点灯させつつ車輌を停止させておくように容易に調整可能な制御装置を提供する。
【解決手段】 直流電圧を出力する直流電源部33と、所定の周波数のパルス信号であってデューティー比が調整可能とされる制御パルスを出力する発振回路としての集積回路43と、この制御パルスに電圧調整が可能とされた直流電圧を重畳する出力調整回路部51と、直流電圧が重畳された制御パルスにより、直流電源部33が出力する一定の直流電圧を制御パルスに同期したパルス信号とすると共に制御パルスに重畳された直流電圧に対応する直流成分を加えた駆動信号を出力する出力調整器61と、駆動信号の極性を切り替える出力切換えスイッチ67とを有する鉄道模型用制御装置とする。
(もっと読む)
発音玩具
【課題】 歌唱や伴奏に合わせて動き、カラオケも楽しめる人形を提供することで、飽きることのない玩具を提供する。
【解決手段】 駆動機構を有する人形と、前記人形と一体とされる音声合成装置本体とスピーカ、前記音声合成装置本体内部に設置される音声混合回路から構成され、前記音声合成装置本体はスピーカとハンディマイクとが接続可能であり、前記音声混合回路は、マイク端子から入力されたアナログ信号とオーディオ端子から入力されたアナログ信号をミキサー回路により重ね合わせ、メインアンプを通してから人形の足部に設置されたスピーカから拡声するものであり、ドライバにより駆動機構の動力源への電圧の印加を行い、駆動機構により人形を動作させる発音玩具とするものである。
(もっと読む)
転動ロボット
【課題】外形からは転動できないと思われるものを転動させることができるようにする。
【解決手段】立方体の外殻形状の本体1内にアウタロータ8を回転支持し、本体に固設されたステータ13と協働してモータを構成する。アウタロータを加速した時の反力や所定の回転即で回転させた状態で電磁制動することで本体を転動させることができる。立方体において平面視で接地面の外方に重量物が位置しなくても転動させることができることから、外形からは転動できないと思われる例えば立方体形状の本体を転動させることにより、不思議さが増し、転動ロボットに対して大きな興味を持たせることができるようになる。
(もっと読む)
発光式形態構成玩具
【課題】 空間的な配置形態に応じて明るさや色が変化するようにして、従来よりも知性および感性の一層の発達向上を図ることが可能な発光式形態構成玩具を提供する。
【解決手段】 本発明の発光式形態構成玩具1は、空間における形態構成要素となる光透過性の筐体2を有し、この筐体2には外部の明るさを検出する照度センサ3aが取り付けられ、また、筐体2内部には光源5が配置されるとともに、照度センサ3aの検出出力に基づいて光源5の明るさ、あるいは色を変化させる制御手段6を備えている。
(もっと読む)
可逆熱変色性玩具セット
【目的】 使用者が発熱部に直に触れることがないと共に、加熱時における変色過程を視認することができる、安全性及び視覚的効果の高い興趣に富んだ可逆熱変色性玩具セットを提供する。
【構成】 少なくとも一部に可逆熱変色部71を有する熱変色性カード7と、該熱変色性カード7の可逆熱変色部71を加熱する加熱装置2とからなる可逆熱変色性玩具セット1であって、前記加熱装置2が、電源と、本体3外面に配置される発熱部4と、該発熱部4外方に隙間部5を形成する透明表示部6とからなり、前記隙間部5に熱変色性カード7を挿入して可逆熱変色部71を変色させる可逆熱変色性玩具セット1。
(もっと読む)
リモコン二輪車のロール角制御装置
操縦者の操縦操作を容易にすることができ、広い速度域でリモコン二輪車の姿勢を安定させることができる、リモコン二輪車のロール角制御装置を提供するために、ロール角制御装置21を設けた。ロール角制御装置21は、車体本体のロール角を検出するロール角検出手段35と、操舵軸又はフロントフォークに左右方向の回転トルクを付加する操舵用アクチュエータ13と、ロール角検出値とリモコン受信機からのロール角目標値とに基づき操舵用アクチュエータに対する操作量を出力してロール角検出値をロール角目標値に近付けるように制御する制御手段29と、少なくとも中立点を境にして舵角が左右の何れに切れているかを検出する舵角検出手段50とを備え、前記制御手段29によって、舵角検出手段にて検出した舵角が右切れ方向の場合には右回転トルクを付加し、舵角検出手段にて検出した舵角が左切れ方向の場合には左回転トルクを付加するような信号を、操舵用アクチュエータに対する操作量に付加するように制御するキャスタ効果制御手段51を構成した。  (もっと読む)
(もっと読む)
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
(もっと読む)
2足歩行ロボットの充電システム
【課題】2足歩行ロボットのバッテリの充電を、2足歩行ロボットの姿勢を安定させ、火花放電やノイズの発生を防止して行う充電システムを提供する。
【解決手段】2足歩行ロボット10に備えられたバッテリ11を充電する充電システムであって、充電装置1は、2足歩行ロボットを着座姿勢に保持する着座保持手段2と、2足歩行ロボット10が着座保持手段2に着座したときに2足歩行ロボット10に設けられた受電コネクタ12と嵌合する給電コネクタ3とを備え、また、受電コネクタ12と給電コネクタ3が接続状態にあるか否かを検知する接続状態検知手段と、バッテリ11に対する充電電流を出力する充電用電源と、接続状態検知手段により受電コネクタ12と給電コネクタ3が接続状態にあることが検知されたときに、該充電用電源からバッテリ11に充電電流を供給してバッテリ11を充電する充電制御手段とを有する充電ユニット4を備える。
(もっと読む)
1 - 14 / 14
[ Back to top ]