
Fターム[2F029AD05]の内容
航行(Navigation) (6,360) | 補正、補償、単位系等の変換 (108) | 補正(修正)補償 (76) | その他 (8)
Fターム[2F029AD05]に分類される特許
1 - 8 / 8
測位装置、測位システム、測位方法および測位プログラム
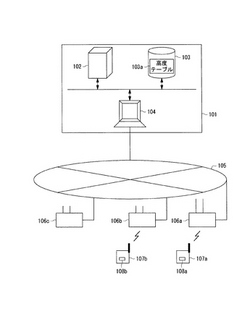
【課題】 記憶容量の増大を抑制しつつ、地球中心を1個のGPS衛星と見立てて測位計算を精度よく行えるようにする。
【解決手段】 動端末107a、107bからGPSサーバ102への接続が確立すると、移動端末107a、107bが接続したアクセスポイントの情報を専用プロトコルによって送信パケットに付加し、GPSサーバ102に伝達し、GPSサーバ102は、移動端末107a、107bが接続したアクセスポイントの情報に基づいて高度テーブル103aを検索することにより、現在の移動端末107a、107bの位置に対応した高度情報を取得し、移動端末107a、107bに送信し、測位手段108a、108bは、現在の移動端末107a、107bの位置に対応した高度情報を取得すると、地球中心を衛星と見立てて測位計算を行う。
(もっと読む)
移動体の位置算出装置および算出方法

【課題】 本発明は、移動体の走行状態に応じて精度良く移動体の位置の算出をすることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位衛星からの受信電波を受信するRF受信部12と、受信された信号から移動体の速度および角速度データを測位する測位演算部14と、速度と角速度の関係を規定する角度予測関数に基づき角速度の予測範囲を設定する予測範囲設定部16と、測位された角速度データが予測範囲内にあるか否かを判定し、角速度データが予測範囲外の場合には、角速度データが予測範囲内となるように角速度データを補正する測位データ補正部20と、移動体の走行状態を判定し、当該判定結果に応じて予測範囲設定部16による角度予測関数の選択を制御する予測範囲可変部18とを含んで構成される。
(もっと読む)
携帯電話を使った位置情報取得方法
【課題】 正確な紙地図は詳細な位置情報を結集したものであり、これらの位置情報を携帯電話へ、手軽に取り込む手段がない。紙地図を携帯電話へ取り込めないのは、紙地図のアナログデータを簡単にデジタルデーターへ変換する手段がなかったためである。
【解決手段】 緯度経度の編集機能及び、GPS機能、カメラ機能を持った携帯電話において、予め緯度経度線をベクターデータ化して電子的に編集可能な状態にする。一方、紙地図は粗緯度経度線を記載する。この紙地図を携帯電話のカメラで撮影し、映し出されたラスター状態の粗緯度経度線に、予め緯度経度線をベクターデータ化し編集可能にした緯度経度線を重ね合わせて地図位置情報を取得する。
(もっと読む)
車両位置検出装置
【課題】 GPS信号の信頼性に応じた補正処理を行うことができ、精度の高い車両の位置検出を行うことのできる車両位置検出装置を提供する。
【解決手段】 GPS信号を受信するGPS受信機2と、前記GPS信号に基づいてGPS位置A(t)を演算する第1の演算手段と、車両の走行距離を検出する距離検出手段と、前記車両の進行方位を検出する方位検出手段と、前記距離検出手段により検出された走行距離と前記方位検出手段により検出された進行方向とに基づいて相対位置R(t)を演算する第2の演算手段と、を備えた車両位置検出装置であって、前記GPS位置の信頼性を算出する判定手段と、前記判定手段による信頼性および前記第1の演算手段による演算時間を考慮してGPS位置A(t)により相対位置Rを補正する補正手段と、を備えてなる。
(もっと読む)
カーナビゲーション装置
【目的】高マップマッチング精度と優れた慣性航法システムの学習機能を備えるカーナビゲーション装置を提供する。
【構成】カーナビゲーション装置10は、地図データベース16の道路情報につき、車が道路上から外れるオフロード状態が有り得ない道路か否かの道路識別情報B5を得る道路識別手段と、この道路識別情報B5に基づく推測経路へのマップマッチング時に、所定時間以上衛星測位システム2が連続非測位であり、慣性航法システム1により自車が移動していると判断され、自車位置近傍にオフロード状態が有り得ない道路があると判断された場合、又は、前の自車位置のマッチング率が予め設定の設定値より高く、且つ、自車が地図データベース16のオフロード状態が有り得ない道路上にあると検出された場合には、自車位置をその道路上へ強制的にマップマッチングすると共に、慣性航法システム1の学習強度を強くする強制マップマッチング手段を備える。
(もっと読む)
位置情報提供サーバ、位置情報提供システム、携帯端末およびプログラム
【課題】 携帯端末からGPS衛星受信信号を位置情報提供サーバに送り、位置情報提供サーバ側で高精度に携帯端末の位置を測位してマッチング処理した位置情報を携帯端末に提供する位置情報提供システムを提供する。
【解決手段】 携帯端末30はGPS受信機31と受信信号処理部32と測位要求部33とを有する。位置情報提供サーバ20は、GPS受信データ解析・位置算出部231とマッチング処理部232を有する。携帯端末は、GPS受信機31で受信したGPS衛星信号を受信信号処理部32で処理したGPS受信データを測位要求部33からの測位要求とともに位置情報提供サーバ20に送信し、位置情報提供サーバ20は、GPS受信データ解析・位置算出部231により携帯端末から送られたGPS受信データに基づいて携帯端末の位置を算出し、当該位置をマッチング処理部232によりマッチング処理したマッチング位置情報を生成して携帯端末に配信する。
(もっと読む)
カーナビゲーション装置と自車位置表示方法
【課題】 狭角のY字分岐点近傍を通過時の自車位置を的確に検出できるカーナビゲーション装置を提供する。
【解決手段】 GPS衛星からの電波を受信して自車両の現在位置を計算するGPS装置1と、地図情報記憶部5とを備えたカーナビゲーション装置において、現在位置計算部31、Y字分岐検出部31b、Y字分岐判定部31cを有する。Y字分岐検出部は、現在位置にもとづいて、地図情報記憶部に格納された道路情報から前方の狭角のY字分岐を検出する。Y字分岐判定部は、検出された狭角のY字分岐点近傍を走行時に、車速が分岐路側の制限速度にもとづく所定の閾値以下に低下し、追い越し車線側のターンシグナルのオンを検出しない場合は、自車両が狭角のY字分岐路側を走行していると判定し、そうでない場合は、自車両は本線に留まっていると判定する。そして、判定した結果にもとづいてディスプレイ7に正しく自車両の位置を表示する。
(もっと読む)
車両位置特定装置
【課題】 車両の現在位置と、走行車線をより確実に特定する。
【解決手段】 信号機を魚眼レンズで撮像し、抽出した信号機画像から車両に対する仰角と水平角を算出し、これと信号機の位置座標、高さとから車両の現在位置を特定する。更に、車道外側線から信号機までの道路幅方向の距離と車線幅とから、走行車線を特定する。
カメラによる撮像対象として、走行する道路上及び周辺に多数存在する信号機を撮像するようにしているので、頻繁に走行道路上の正確な車両位置を特定することが可能になる。また、常時光りを発している信号機を撮像及び認識の対象としているので、夜間、雨天などの悪環境であっても、確実に信号機の認識、抽出が可能になる。従って、夜間や雨天等であっても、車両位置や走行車線を確実に特定することができる。
(もっと読む)
1 - 8 / 8
[ Back to top ]