
Fターム[2F062GG37]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | エンコーダ (142) | リニアエンコーダ (35)
Fターム[2F062GG37]に分類される特許
21 - 35 / 35
測定装置

【課題】
構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を接触させて任意の部分の寸法を容易に測定することができる測定装置を提供する。
【解決手段】
測定装置1は、被測定物Aの寸法を測定するもので、被測定物Aを載置する載置面3を備えた基台2と、基台2の載置面3と略平行の面で回動可能となり、且つ長手方向に摺動可能となるようにして基台2に取り付けられたアーム部材35と、基台2の載置面3と略直角の方向に移動可能となるようにして、アーム部材35の先部に取り付けられた接触子45と、アーム部材35の回動角度Pを検出する第1の検出手段21と、アーム部材35の長手方向の移動距離Nを検出する第2の検出手段39と、接触子45の移動距離Mを検出する第3の検出手段49とを有する。
(もっと読む)
玉型形状測定装置

【課題】ハイカーブフレーム枠のフレーム形状を正常に測定できるとともに、フレームPDも正確に測定することのできる玉型形状測定装置を提供する。
【解決手段】眼鏡のフレーム枠を保持するスライド枠3,3を有する保持手段と、フレーム枠のヤゲン溝に当接させる測定子37,38とを備え、スライド枠3,3及び測定子37,38を相対的に移動させることによりフレーム枠の形状を測定する玉型形状測定装置であって、測定装置本体1から離れた位置にある仮想軸402を中心にして、前記保持手段を矢印D方向にスイングさせるための保持手段スイング機構を備えた。
(もっと読む)
ワイヤ式三次元座標測定機
【課題】簡易な構造で、被測定物の平面度や形状を測定するワイヤ式三次元座標測定機を提供するものである。
【解決手段】スタンド1の上部にリニアスケール4を取付けた水平アーム3を設け、このリニアスケール4上を水平に移動するリードヘッド30の先端にワイヤ8を接続し、水平アーム3の先端に、リニアスケール4から引出されたワイヤ8が通過する回転ガイド5と、これに回動自在に接続された角度ガイド6とからなるワイヤガイド器7を設け、前記回転ガイド5に角度ガイド6の回転角度を検出する中空エンコーダ33を設け、回転ガイド5と角度ガイド6とを回動自在に接続する軸30に、ワイヤ8の曲がり角度を検出するエンコーダ42を設けると共に、先端子10の座標を演算する座標演算器を設けて、被測定物12に接触させた先端子10の位置座標を演算するようにしたものである。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 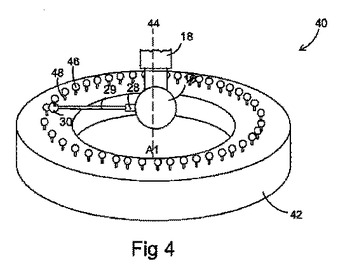 (もっと読む)
(もっと読む)
形状測定方法、及び形状測定装置
【課題】 高精度で面形状を測定でき、そのために短時間で加工を終了できる形状測定装置及び形状測定方法を提供する。
【解決手段】 形状を測定する被測定物の加工面に所定の接触力で接触する接触体と、この接触体を前記加工面に対して進退可能に保持する保持部と、前記被測定物を載置するステージと、予め定められた所定軌跡で相対移動させ、前記被測定物の加工面形状と前記所定軌跡とのズレを、前記接触体の前記保持部に対する所定閾値以上の前記移動量変動の有無によって検出する。
(もっと読む)
接触式形状測定器用プローブヘッド
【課題】プローブ軸及びプローブ枠の精密加工に要する加工コストを軽減することができること、微小な測定力を精密に調整しつつ、高精度の測定を実現することのできる、接触式形状測定器用プローブヘッドを提供すること。
【解決手段】測定用触針3が取り付けられるプローブ軸1と、このプローブ軸1を進退自在に支持するプローブ枠2とを備えた接触式形状測定器用プローブヘッドにおいて、プローブ枠2には、プローブ軸1をプローブ枠2との間で隙間を設けて支持する支持用空気静圧パッド4a、4bと、支持用空気静圧パッド4a、4b以外にプローブ枠2に設けられ、空気の粘性抵抗により発生する圧力差を利用して、プローブ軸1に測定力を発生させる測定力発生用空気静圧パッド5a、5bとが設けられている。
(もっと読む)
振動機械の変位測定装置
【課題】プレス機のような測定方向以外に振幅の大きな振動が発生する振動機械の振動による誤計数の発生を防止する。
【解決手段】測定方向以外に振動する振動機械(40)の変位測定装置において、相対変位部材の一方(48)に固定されるスケール50及び直動ガイド(レール52)と、該直動ガイドのスライダ54に固定される検出器56と、前記スライダ56と相対変位部材の他方(46)を回動自在に連結するリンク60を備える。
(もっと読む)
表面性状測定装置
【課題】傾斜を有する被測定物表面を高精度に倣い測定する表面性状測定装置を提供する。
【解決手段】 測定部210により被測定物表面を倣い走査する。測定部210は、接触部212を先端に有するスタイラス211と、接触部212が被測定物表面に当接した際のスタイラス軸方向の測定力を検出する測定力検出手段を有する。移動機構は、測定力を一定にしながら測定部210を被測定物表面に対して相対移動させる。
移動機構は、接触部210を回転中心として測定部210を回転させてスタイラス211を被測定物表面に垂直にする回転機構400を備える。
(もっと読む)
形状測定方法および形状測定装置
【課題】プローブの倣い走査による形状測定装置の測定タクトを短縮する。
【解決手段】被測定面104を倣い走査するプローブ101の走査経路を第1〜第3の測定経路105〜107に分割する。第1の測定経路105による形状測定後に、その測定データと被測定面104の設計形状を比較する形状解析を行い、誤差が大きい場合には、第2の測定経路106における形状測定を強制終了させる。誤差の原因を検討し、適切な処理を行ったうえで第1の測定経路105から形状測定を再開する。すべての測定経路の測定を終了後に形状解析を行って再度測定を行う場合に比べて、トータルの測定タクトを短縮できる。
(もっと読む)
座標測定機
ペンタポッド式運動学を用いて動作し、5つの軸の周りにおいて測定点の先端における絶対位置を決定するための座標測定機である。この機械は、第1の、2つに分岐したリンケージと、第2の、3つに分岐したリンケージと、さらに複数の長細い支柱とを備える。複数の支柱のうち、第1および第2の支柱は、第1のリンケージを共有し、複数の支柱のうち、第3、第4および第5の支柱は、第2のリンケージを共有し、第1および第2のリンケージは、ハンドルによって連結されている。第1および第2の支柱は、第1のリンケージに対して回転可能に係止されていることが好ましく、第3、第4および第5の支柱は、第2のリンケージに対して回転可能に係止されていてもよい。第1から第5のノードを設け、それぞれが第1から第5の支柱のうちの対応する1つに対してスライド可能に係止してもよい。これらのノードは、ノードに対する対応の支柱の変位を測定するための手段を備えてもよい。  (もっと読む)
(もっと読む)
3次元形状測定装置及び方法
【課題】被測定物の3次元形状を高精度に測定することが可能となる3次元形状測定装置及び方法の提供。
【解決手段】一対のプローブ20a,20bを、その先端同士が所定の間隔を開けて一直線状に対向するように配置し、被測定物1を、被測定物1の表面側及び裏面側がそれぞれ一対のプローブに対向するように位置させた後に、一対のプローブ20a,20bのお互いの位置関係を変更することなく、該一対のプローブ間における被測定物1の相対的な位置を、プローブ固定部材20やプローブ20a,20b等の質量体にかかる重力のZ軸方向成分を駆動力として、スライド移動させて、一方のプローブにより被測定物1表面の3次元形状を測定し、次いで、他方のプローブにより被測定物1裏面の3次元形状を測定する。
(もっと読む)
形状測定器
【課題】 測定プローブを傾斜させて支持しながら被測定物の表面形状を高精度に測定できる形状測定器を提供する。
【解決手段】 形状測定器30により既知形状の被測定物(真球)の形状を測定する(S12)。次に、測定プローブの設計傾斜角度の値から±0.5度間を5等分し、それぞれの形状誤差を算出し、誤差が最小となる角度値を決定する(S16)。更に同様な計算を繰り返すことで、誤差が最小となる傾斜角度に収束させる(S18、S20)。被加工部材を測定する際には、測定した形状を傾斜角度による誤差分で補正することで、測定精度を高める。
(もっと読む)
形状測定器
【課題】 接触力を変えながら小さな接触力で被測定物の表面形状を測定できる形状測定器を提供する
【解決手段】 測定プローブ32を傾斜θを持たせて支持する。測定プローブ32の後退する力は、傾斜θによって生じているため、自重mに比べて遙かに小さいmgsigθとなる。一方、エアシリンダ40で押出力Fcで付勢する。このため、ワークWへの測定プローブ32の接触力は、測定子自重傾斜成分mgsigθと、エアシリンダ40の押出力Fcとの差分(F=Fc−mgsigθ)になるので、接触力を非常に小さくすることが可能である。更に、エアシリンダ40で押出力Fcを変えることで、接触力を変えることができる。
(もっと読む)
接触式変位測長器
【課題】接触式変位測長器による被測定物の計測において、正確で再現性のある計測結果を得ること。
【解決手段】第1の直線方向に往復移動が可能な第1の移動体2と、第1の移動体2を駆動する駆動部3と、第1の移動体2の移動に連動して第1の直線方向に平行な第2の直線方向に往復移動が可能な第2の移動体4と、第2の移動体4の先端に交換可能に取り付けられた測定子8と、測定子8が被測定物に当接した状態のときに被測定物に及ぼす測定力を第2の移動体4の後端において検出する測定力検出部9と、第2の移動体4の移動量を測定子8と測定力検出部9の間において検出する位置検出部10と、測定力検出部9の出力に応じて測定力を一定に保つように第1の移動体2の移動量を制御する制御装置300と、を備える。
(もっと読む)
プローブ制御装置および形状測定装置
【課題】接触式のプローブの接触荷重の変動を低減し、高速かつ高精度な3次元計測を可能にする。
【解決手段】図示しないワークに接触させるプローブ1は、板バネ2a、2bを介してステージ7に支持され、リニアモータ(10、11)によって上下動する。まず、位置設定器17の指令値に従ってステージ7を移動させ、プローブ1をワークに接触させた後は、板バネ2a、2bの変位によってプローブ1の接触荷重を検出する変位センサ5と荷重設定器18を含むプローブ荷重制御系に切換えて接触荷重を制御しながらプローブ1を走査する。走査開始直後には接触荷重に誤差が発生するため、予め設計値を用いた演算あるいはダミー走査によって求めた荷重補正信号を荷重補正器22に蓄えておき、必要に応じてプローブ荷重制御系の出力に加える。
(もっと読む)
21 - 35 / 35
[ Back to top ]