
Fターム[2F062GG61]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 電気的な検出器 (248)
Fターム[2F062GG61]の下位に属するFターム
歪センサ (30)
抵抗変化型 (16)
電磁誘導型 (57)
静電容量型 (25)
接点、リミットスイッチ (14)
Fターム[2F062GG61]に分類される特許
101 - 106 / 106
探針ヘッドを有する装置及び測定器
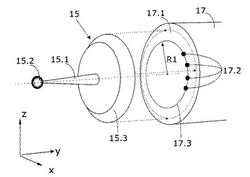
【課題】 現在取り付けられている探針ヘッドを認識できる装置を提供すること。
【解決手段】 着脱自在の探針ヘッド15を有し、ワークを測定するための装置であって、探針ヘッド15を取り付けるための受け部17.1と、該受け部17.1の所定の位置に配置されたセンサ17.2と、探針ヘッド15に設けられた幾つかの相対部材とを設けた。また、探針ヘッド15が受け部17.1に取り付けられると、相対部材はセンサ17.2と互いに作用し、探針ヘッド15のコード化を相対部材の位置を調整して設定するようにした。
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
可搬型座標計測機における計測精度向上方法
ジョイントにより連結された複数個の腕セグメントを有する可搬型の座標計測機(CMM)における計測精度向上方法を提供する。本方法は、関節腕が負荷乃至荷重条件下におかれたときその関節腕の構成部分に生じCMMによる計測結果に誤差をもたらす変形をその構成部分から検知するステップと、検知された変形に応じその誤差を補正するステップと、を有する。
 (もっと読む)
(もっと読む)
携帯可能な座標測定装置の操作者に感覚フィードバックを提供する方法および装置
ジョイントアーム部分を有する多関節アームで構成されている携帯可能な座標測定装置(CMM)の操作者にフィードバックを提供する方法が提示されている。この方法は、前記アームが荷重のかかった状態におかれたときに、そのアームに加えられている外力の大きさを示す、前記多関節アームの一部における変形を検知し、前記検知された外力に応じて、前記CMMの操作者にフィードバックを提供することを含む。  (もっと読む)
(もっと読む)
改良版可搬型座標計測機
複数個の腕セグメントをジョイントにより連結して構成した関節腕を有する可搬型座標計測機において、関節腕を構成するジョイントアセンブリを、1個又は複数個の読取ヘッドと、ジョイント内に配置されその特性を計測可能な周期パターンを有するパターン部と、このパターン部に対して相対回転するようジョイント内に配置され当該パターン部に反応する1個又は複数個(できれば5個)の(例えば接近度)センサと、を有する構成とする。
 (もっと読む)
(もっと読む)
試験標準装置を備えた粗さ測定機器
粗さ測定装置(1)は送り装置(3)用の収容装置(2)を有し、送り装置(3)は加工物表面にわたって粗さセンサ(4)を引っ張るために機能する。収容装置(2)は、粗さセンサ(4)の射程範囲に試験面(25)を備えた試験標準装置(24)を保持する。試験標準装置(24)は収容装置(2)に固着されるポケットに位置決めされることが好ましく、このポケットは送り装置(3)を収容するための孔の壁に具体化される。したがって、その試験面(25)は収容装置(2)の内側に位置し、汚れや損傷から保護され、さらにアクセスしやすいようになっている。  (もっと読む)
(もっと読む)
101 - 106 / 106
[ Back to top ]