
Fターム[2F062GG61]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 電気的な検出器 (248)
Fターム[2F062GG61]の下位に属するFターム
歪センサ (30)
抵抗変化型 (16)
電磁誘導型 (57)
静電容量型 (25)
接点、リミットスイッチ (14)
Fターム[2F062GG61]に分類される特許
61 - 80 / 106
三次元測定プローブ

【課題】磁気浮上式プローブでは、空気軸受けで保持されたスタイラス部が、完全非接触で、保持されているため、スタイラスが非測定物と接触していないときに、振動しやすく、スタイラス部の上下位置を検出するレーザ計測が出来なくなる場合があるので、低振動で安定して測定できる三次元測定プローブを提供する。
【解決手段】三次元測定プローブの磁気発生手段を、透明板で密閉構造とするとともに、その一部に小径穴を設け、空気流れのダンパ効果により、振動低減を行なう。
(もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 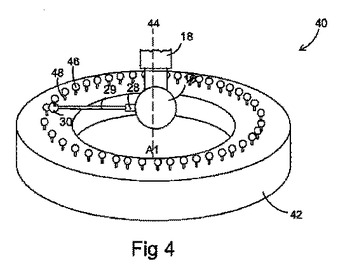 (もっと読む)
(もっと読む)
表面形状測定用触針式段差計の空気抵抗補正方法

【課題】触針式段差計による形状測定時に発生する力を短時間で正確に算出できるようにする表面形状測定用触針式段差計の空気抵抗補正方法。
【解決手段】支点に揺動可能に取付けられた支持体の一端に探針を取付け、一端に隣接して探針の垂直方向変位を検出する変位センサの磁性体コアを取付け、他端には探針に針圧を加える針圧発生装置の磁性体コアを取付け、探針が捉えた試料の表面形状を支持体の支点回りの回転運動により変位センサで測定する触針式段差計の空気抵抗補正方法において、針圧発生装置を作動させて探針を上端から下げ、下端で一回跳ね返る際の探針変位の時間変化を測定し、測定した探針変位の時間変化に基づき探針の速度と力の関係を求め、探針の速度がほぼゼロにあるときの力を求め、求めた力に基づいて設定値とのずれを補正し、針圧発生装置に流す電流と探針にかかる力との正しい関係を求め、設定したい力に対応するコイル電流を算出する。
(もっと読む)
表面形状測定器の較正方法及び表面形状測定器
【課題】 特に、従来に比べて高精度に且つ簡単な手法により、ピエゾ素子への印加電圧変化に対する走査部材の昇降方向への移動量を求めることができる表面形状測定器の較正方法を提供することを目的としている。
【解決手段】 Zステージ11を試料表面に向けて移動させて、レーザホロスケール12により測定した前記Zステージ11の移動量と、変位検出部6により測定した前記カンチレバー5の変位量との関係を求める。次に、ピエゾ素子7に印加する電圧を変化させて、前記ピエゾ素子7に印加した電圧変化量と、前記変位検出部により測定した前記カンチレバー5の変位量との関係を求める。2つの検出結果から求められる各比率を、組み合わせることにより、ピエゾ素子7への印加電圧変化に対するカンチレバー5の昇降方向への移動量を算出する。
(もっと読む)
接触式プローブの倣い制御方法及び接触式測定機
【課題】アプローチ速度を極低速にして測定効率を低下させることなく、測定対象物の接触痕の発生を抑制する。
【解決手段】触針16を一定の測定力Fで測定対象物(ワーク8)に接触させながら、測定対象物(8)の表面に沿って移動させる接触式プローブ(力センサ10)の倣い制御に際して、触針16に目標測定力よりも低い力が加わったことを検知するための接触検知レベルを設け、触針16に加わる力が該接触検知レベルになった時点から、触針16を目標測定力で測定対象物(8)に接触させるための力制御に移行する。前記接触検知レベルから目標測定力まで、力制御の指令値を徐々に増加させることにより、高応答化による衝撃増大やオーバーシュートを防ぐこともできる。
(もっと読む)
加工品の外径測定方法及び装置
【課題】 はさみゲージを用いた加工品の外径測定作業の生産性を向上すること。
【解決手段】 加工品の外径測定方法において、はさみゲージ11を取付けたスライダ14、16を、テーブル12上に設置したスライドガイド13、15に沿ってパルスモータ21により移動させることにより、はさみゲージ11を加工品の外径に対して進ませ、パルスモータ21の負荷電流が一定値をこえたことを条件にはさみゲージ11が加工品の外径に衝合したこと、そのときのパルスモータ21のパルス量により加工品の外径に対するはさみゲージ11の衝合位置を判定し、加工品の外径が許容範囲内にあるか否かを測定するもの。
(もっと読む)
管体の形状測定方法、同装置、管体の検査方法、同装置、管体の製造方法および同システム
【課題】 簡素にかつ高い精度で管体の形状を測定できる形状測定装置を提供する。
【解決手段】 略水平姿勢の管体10をその両側の端部13に当接する支持ローラ40…によって支持する。管体10の両側端部13近傍の内周面11を一対の押圧ローラ20,20によって前記支持ローラ40…に押し付けて、管体10の外周面12が支持ローラ40…に確実に接触した状態を維持する。この状態で管体10を回転させ、この回転に伴う管体10の外周面12の半径方向の変位量を変位検出器30…で検出する。
(もっと読む)
物理量導出装置、物理量導出プログラム及び物理量導出方法
【課題】 触覚センサの接触子に対して水平方向に働く物理量情報を導出することが出来る物理量導出装置、物理量導出プログラム及び物理量導出方法を提供する。
【解決手段】感圧素子により出力される出力値に基づき接触子に対して垂直方向に働く垂直荷重を把握する第一処理と、感圧素子により出力される出力値に基づき接触子の移動量情報を把握する第二処理と、接触子に対して垂直方向に働く垂直荷重、接触子の移動量情報、及び接触子に対して水平方向に働く物理量情報の関係式を用いて、前記第一処理で把握した接触子に対して垂直方向に働く垂直荷重と前記第二処理で把握した接触子の移動量情報とから接触子に対して水平方向に働く物理量情報を導出する第三処理とを行うことを特徴とする。
(もっと読む)
可搬型座標測定装置
可搬型座標測定装置(CMM)を開示する。CMMは向き合った第1および第2端部と、第1の関節アームに取り付けられた測定プローブとを有する、手動で位置決めができる関節アームを有してもよい。アームは複数の接合アーム部位を有してもよい。各アーム部位は位置信号を生じる少なくとも1つの位置トランスデューサを有してもよい。CMMは、位置信号をトランスデューサから受信し、選択された空間においてプローブの位置に対応するデジタル座標を提供する電子回路を有してもよい。少なくとも1本のアーム部位はその長さに沿って非直線的でもよい。  (もっと読む)
(もっと読む)
反り測定システム、成膜システム、及び反り測定方法
【課題】In−situで安定した測定を行うことのできる反り測定システム、反り測定方法、及び成膜システムを提供する。
【解決手段】鉛直上下方向に移動可能であり、成膜用ホルダに載置されたウエハの外周部を支持して持ち上げるウエハ持ち上げ機構と、持ち上げられた前記ウエハの所定位置の高さを検出する高さ測定機構と、制御部とを具備する。前記ウエハ持ち上げ機構は、成膜チャンバ内で前記ウエハを支持する。前記制御部は、前記ウエハの成膜前後に、前記ウエハを支持した状態で前記ウエハ持ち上げ機構を測定用高さに位置させ、持ち上げられた前記ウエハの高さを測定し、成膜前後の前記ウエハの高さデータに基いて、成膜前後での前記ウエハの反り変化量を算出する。
(もっと読む)
表面形状測定装置及び触針荷重の異常検出方法
【課題】被測定物の表面に接触する触針を有する表面形状測定装置において、触針に作用する荷重の異常を検出することを可能にすることにより、触針に作用する過大な荷重による触針やピックアップの破損を防止する。
【解決手段】表面形状測定装置1を、触針11と被測定物Wとを相対移動させるモータ(51、52)の回転速度又は触針1と被測定物Wとの間の相対移動速度を検出する速度検出部64と、モータ(51、52)を流れる駆動電流を検出する電流検出部(53、54)と、モータ(51、52)の回転速度又は相対移動速度が所定の閾値速度Tvより遅く、かつ駆動電流が所定の閾値電流Tiを超えるとき、触針11に異常な荷重が作用していると判定する触針荷重異常検出部64と、を備えて構成する。
(もっと読む)
位置度測定用座標検出機、及び位置度測定システム
【課題】位置度測定の信頼性を高めるため十分に多数の測定点数を確保し、全ての測定点毎に正確な測定座標信号を出力する。
【解決手段】検出機2を、ワークWの上方の所定位置に配置された基準プレート5の基準穴SHに上方から挿入して装着されるガイドブッシュ21の筒内に回動自在に挿入されるように長尺筒状に形成され、一方端が測定対象穴に挿入される外筒体22と、外筒体22を介して筒軸周りに回転自在に設け、外筒体22の筒軸とその測定点と間の距離を検出し、対応する距離信号を出力する距離検出手段23と、距離検出手段23の回転角度を検出し、対応する回転角度信号を出力する回転角度検出手段24と、から構成する。
(もっと読む)
表面追従型測定器
【課題】軽量で簡単な構造により触針の測定力を検出して、触針の追従性を向上させ、測定速度の高速化を可能とする。
【解決手段】測定対象面(ワーク表面10)に接触して変位する触針14と、該触針14が先端に保持されたスタイラス12と、該スタイラス12の変位を検出するピックアップ18と、測定力Fを検出する手段と、測定力Fを調整するアクチュエータ40とを備え、前記触針14に加わる測定力Fが目標値となるようフィードバック制御しつつ、前記ピックアップ18により触針14の変位を検出する表面追従型測定器において、前記触針14とスタイラス12の間に圧電素子30を挿入し、該圧電素子30により測定力Fを検出してフィードバック制御する。
(もっと読む)
接触式シート厚さ計
【課題】シートの透明度や色、つや、表面のザラつき等の影響を受けることなく、また、バックアップローラー使用の場合のようなベアリング精度も関係なくなり、精度良くシート厚さをオンラインにて連続的に計測でき、また、100〜200m/分程度のシートの走行スピードでも、精度良くシート厚さを計測できるような接触式シート厚さ計を提供すること。
【解決手段】接触式シート厚さ計は、シート厚さの測定時においては固定されている耐摩耗性のバックアッププレートと、一端を固定した板バネと、板バネの反固定側先端部に取り付けられて被計測シートをバックアッププレートに対して接触してバックアッププレートとの間に被計測シートを挟み込むようにする耐摩耗性の接触子と、接触子が取り付けられた板バネの部分に間隔を置いて対峙し被計測シートの厚さの変動に応じた板バネの変位を検出する非接触型変位センサーとを備える。
(もっと読む)
測定装置、表面性状測定方法、及び表面性状測定プログラム
【課題】高精度で被測定物を測定可能な測定装置、表面性状測定方法、及び表面性状測定プログラムを提供する。
【解決手段】演算部212が、スケール部19bとスライダ16先端との間の相対変位特性に基づく補正用フィルタ212aにおいて、スケール部19bで検出されたスライダ16の変位に補正用フィルタ212aを適用した値を先端球17aの変位と加算して測定値を算出する構成とする。このような構成とすることにより、高精度で被測定物を測定可能な測定装置、表面性状測定方法、及び表面性状測定プログラムを提供することが可能となる。
(もっと読む)
寸法測定ヘッド
【課題】 センサロッドとセンサヘッドを備えるリニアセンサ型のセンサを用いる際に、簡単な構成であっても、センサロッドを直動型として、センサ径およびストロークを大きくすることができ、高精度の測定が可能な寸法測定ヘッドを提供することである。
【解決手段】 可動アーム10が備える接触子1をワークWに当接して寸法を測定する際に、前記可動アーム10が、その先端部に前記接触子を備えるフィンガアーム2と、該フィンガアームの基部を支持する支持アーム4とを備えており、センサロッド5を前記支持アームの先端部に装着し、センサヘッド6をユニット基部8に固着して、前記フィンガアームの変位をセンサロッドの直動移動変位に変換する平行板バネ3を備えた平行移動機構部を介して前記支持アーム4と前記センサヘッド6とを連結した構成の寸法測定ヘッドHとした。
(もっと読む)
測定制御装置、表面性状測定装置、および、測定制御方法
【課題】測定能率を下げることなく、力センサおよび被測定物の接触時のオーバーシュートを簡単な構成で抑制できる三次元測定装置の提供。
【解決手段】三次元測定装置の接近制御手段234は、位置制御ループRPを有効にし、位置制御により駆動アクチュエータ133を駆動させて力センサ1を接近位置に到達させる。接触制御手段235は、力センサ1が接近位置に到達したことを認識すると、スイッチ227を制御して力制御ループRFを有効にし、力制御により駆動アクチュエータ133を駆動させて力センサ1を被測定物に接触させる。
(もっと読む)
機械部品を測定してチェックするための装置
プラグゲージ(1)は、チェックされるべき寸法を表わす電気信号の無線送信のための電子デバイスを含むキャップ(13)によって閉じられるハンドル(2)と、電気信号を生成するためのトランスデューサと結合される測定アームセットを含むプローブ(6)とを有する、長手方向軸を規定する支持・保護システムを含む。プローブは、ハンドルに対する長手方向軸を中心とするプローブの回転を防止するために機械的基準を含むインタフェース要素(8)によって、ハンドルのキャップに対して接続される。  (もっと読む)
(もっと読む)
表面性状測定装置
【課題】被測定物の表面性状などによる特性変動や外乱などがあっても、高精度で、かつ、測定時間を増大させることなく、測定力一定の倣い測定が実現可能な表面性状測定装置を提供する。
【解決手段】力センサ1と、駆動用アクチュエータ11と、検出器12とを備える。力センサ1からの検出信号を取り込、検出信号が目標測定力に一致するように駆動用アクチュエータを駆動させる倣い制御手段54と、力センサ1からの検出信号が目標測定力に一致したときにタッチ信号を発生するタッチ信号発生部51と、倣い制御手段が動作中において、力センサ1からの検出信号の変動幅が予め設定した一定幅未満の状態では、カウンタ26の測定値を所定時間間隔で取り込み、力センサ1からの検出信号が振動しかつ振幅が予め設定した一定幅を超える状態では、タッチ信号が発生される毎にラッチカウンタ52の測定値を取り込む測定値取込手段55とを備える。
(もっと読む)
形状検出装置
【課題】形状検出ロールの耐久性を維持しつつ垂直荷重の漏れ量を抑制して、圧力センサでの測定精度を向上させる。
【解決手段】ケーシング7の内壁14であって、圧力センサ6に対向する対向壁部14aにケーシング7の肉厚を薄くするように溝部15を形成する。孔25の内壁31であって、圧力センサ6に対向する対向壁部31aに、内壁31からロール本体5の外周面までの距離を短くするように溝部15を形成する。
(もっと読む)
61 - 80 / 106
[ Back to top ]