
Fターム[2F062GG68]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 電気的な検出器 (248) | 静電容量型 (25)
Fターム[2F062GG68]に分類される特許
1 - 20 / 25
工作機械用測定方法

【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
微小表面形状測定プローブ

【課題】プローブと被測定物との接触圧を従来よりもさらに微小に調整できる微小表面形状測定プローブを提供する。
【解決手段】微小表面形状測定プローブは、被測定物1と接触する接触子を2先端に有するプローブシャフトと、プローブシャフトに与える付勢力に対する反力が作用するようにプローブ本体に組み込まれた圧電センサと、圧電センサに作用する荷重を測定する荷重検出部と、荷重検出部により検出された荷重に基づいて、付勢装置による付勢力を調整する制御部と、接触子2を通して被測定物1との接触点へレーザ光を照射し、接触点で反射されたレーザ光を検出することで、接触子2と被測定物1との接触を感知する接触感知装置と、を備える。
(もっと読む)
表面形状測定装置
【課題】被測定物の表面形状を高い精度で測定し得る表面形状測定装置を提供する。
【解決手段】表面形状測定装置500は、被測定物600を支持する被測定物台510と、力感知部100と、力感知部100と被測定物600を互いに近づけるまたは遠ざけるために力感知部100と被測定物600を相対的にZ軸に沿って移動させるZ走査機構540と、Z軸に直交するX軸に沿って力感知部100と被測定物600を相対的に移動させるX走査機構520とを備えている。力感知部100は、被測定物600に近接されて被測定物600から力を受けるプローブを含み、このプローブが被測定物600から受ける力を感知する機能を有している。
(もっと読む)
軸受用ころの外径測定装置
【課題】軸受用ころの外径寸法を複数の周方向位置で簡単に精度よく測定できるようにすることである。
【解決手段】ころAを円形の回転測定台1の上面に軸方向を回転中心から半径方向に向けて載置し、ころAを回転測定台1の所定の位置で回転自在にころ支持具2で支持して、支持されたころAを回転させながら、その軸心上での回転測定台1の上面からの高さをころ高さ変位計3によって測定することにより、軸受用ころAの外径寸法を複数の周方向位置で簡単に精度よく測定できるようにした。
(もっと読む)
円筒形状測定装置および円筒の表面形状測定方法
【課題】 工作機械上で加工された円筒体の表面形状を精度よく測定できる円筒形状測定装置の提供。
【解決手段】 被測定円筒2をその中心軸で回転自在に支持する被測定物の回転支持装置、この回転支持装置に支持された被測定円筒面上にあり該被測定円筒の中心軸(z軸)に平行な一つの直線母線6上の1点5cとこの直線母線を挟む位置にある2点5a,5bの合計3点で被測定円筒面に当接する三叉センサホルダ3と、該三叉センサホルダに前記3つの当接点からの距離が既知の位置に配置された第一変位センサ4aと第二変位センサ4bの2個を備える円筒形状測定装置1。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
接触式一軸変位センサ
【課題】電極の位置あわせが容易、かつ小型で検出感度が高く、安価に構成可能な静電容量式の接触式一軸変位センサを提供する。
【解決手段】本体10と、スタイラス12と、スタイラス支持手段11と、スタイラス12の変位を検出する検出手段13と、を備えた接触式一軸変位センサ1であって、スタイラス支持手段11は、支持部材111および保持部材112を有し、支持部材111は、板状の弾性材料から形成され、外周部111Aを保持部材112に固定されるとともに中心部111Bにスタイラス12を支持し、検出手段13は、支持部材111に設けられた可動電極131と、保持部材112の基部112Bに設けられた固定電極132と、を有し、可動電極131と固定電極132の間の静電容量の変化によりスタイラス12の変位を検出することを特徴とする。
(もっと読む)
伸縮測定装置
【課題】光学式の回転センサを用いた伸縮測定装置を提供する。
【解決手段】回転軸と一定の距離にある第1円周を表面の一部とし、回転軸の周りに回転する第1回転体と、第1円周に沿って、かつ、第1回転体の表面にN極またはS極を向けて配置された複数の第1磁石と、第1円周と対向するように第1回転体の外部に配置され、磁界の状態を検出する第1近接センサ、第2近接センサを備える回転センサと、対象物に取り付けるワイヤーと、ワイヤーが巻きつけられるワイヤー巻取り部と、ワイヤーの張力を一定に保つように、ワイヤー巻取り部を回転させ、ワイヤーの繰り出しまたは巻取りを行う張力保持部と、基準物とワイヤー巻取り部とを固定する固定部と、を備え、張力保持部のワイヤーの繰り出しまたは巻取りの量に応じて、第1回転体と第2回転体が回転する伸縮測定装置。
(もっと読む)
外径振れ測定装置
【課題】静圧気体軸受を利用してリング体の振れを簡単で精度よく測定できるようにする。
【解決手段】
フランジを有する中空シャフトの内径からシャフト外周に開口する放射状の孔を設け、測定物であるリング体を該シャフトに挿入して内径からシャフト外周に開口する放射状の孔から加圧空気を噴射してリング体を非接触状態で把持し、求心力を得るためにシャフト下部の気体の流れの為の溝を設け、リング体重量によっては求心の為に浮上させる中空シャフトの内径に連通する給気孔をフランジに設け、かつリング体によっては求心力が最大になるようにシャフト中央部に適切に大気開放溝を設け、精度の高い振れ測定を可能にする。
(もっと読む)
形状測定装置
【課題】本発明の目的は、構成の簡略化を図ることのできる形状測定装置を提供することにある。
【解決手段】上下方向に振動しながら被測定面24上を走査する探針12と、該探針12を上下方向に振動させる微小振動発生手段16と、該被測定面24と探針12間の距離ないし接触力が一定となるように該探針12を上下動する上下動制御手段17と、該探針12を該被測定面24上で走査する走査手段18と、該探針12の上下方向変位を測定し探針変位信号を出力する変位センサ20と、該信号26中の高周波成分より該被測定面24と探針12間の距離情報ないし接触力情報を取得し、該距離ないし接触力を一定に保つように該被測定面24を走査した際の該信号26中の低周波成分より該被測定面24の凹凸情報を取得する信号処理機構22と、を備えたことを特徴とする形状測定装置10。
(もっと読む)
厚み測定装置及び該厚み測定装置を用いた熱拡散率又は熱伝導率測定装置
【課題】測定者の技量に左右されることが無く、常に、所望の圧接力で、当接部を被測定物に垂直に当接させることが出来、簡便に、被測定物の熱拡散率の算出等に用いる厚さ方向の寸法を、正確に測定出来る厚み測定装置を提供する。
【解決手段】被測定物8を載置面14の上面に載置して、上下方向移動体31を、Z方向駆動ステッピングモータ39の回転駆動によって、降下させると、測定アーム部45の先端に設けられた当接部47が、被測定物8に当接して、被測定物8を載置面14との間に挟持しながら、測定アーム部45を、反力で上方に揺動させる。水平軸44が枢着された部分に設けられたバランスコンデンサ50の容量が、測定アーム部45の揺動に応じて、可変されて、差分0でバランスする領域に、計測値が到達すると、制御部81が、Z方向駆動ステッピングモータ39に、上下方向移動体31の降下を停止させる制御信号を送出する。
(もっと読む)
接触式形状測定器用プローブヘッド
【課題】プローブ軸及びプローブ枠の精密加工に要する加工コストを軽減することができること、微小な測定力を精密に調整しつつ、高精度の測定を実現することのできる、接触式形状測定器用プローブヘッドを提供すること。
【解決手段】測定用触針3が取り付けられるプローブ軸1と、このプローブ軸1を進退自在に支持するプローブ枠2とを備えた接触式形状測定器用プローブヘッドにおいて、プローブ枠2には、プローブ軸1をプローブ枠2との間で隙間を設けて支持する支持用空気静圧パッド4a、4bと、支持用空気静圧パッド4a、4b以外にプローブ枠2に設けられ、空気の粘性抵抗により発生する圧力差を利用して、プローブ軸1に測定力を発生させる測定力発生用空気静圧パッド5a、5bとが設けられている。
(もっと読む)
タッチプローブ
【課題】長くて径小なスタイラスを有し、被測定物とスタイラスとの接触によって生じた衝撃による破損の可能性が低く、検出精度のよいタッチプローブを提供する。
【解決手段】円筒形のプローブ本体10と、プローブ本体10に設けられたスタイラス支持手段11と、スタイラス支持手段11に略重心位置122を支持された棒状のスタイラス12と、スタイラス12の変位を検出する検出手段13と、を備え、スタイラス支持手段11は、弾性部材から形成されるダイヤフラム111を備え、ダイヤフラム111は、スタイラス12を支持する中心部113と、プローブ本体10に固定された外周部114と、中心部113と外周部114との間に放射状に設けられ中心部113と外周部114とを連結する複数のリム115と、を備えるタッチプローブ1。
(もっと読む)
上下定盤面平行度測定用ボード、上下定盤面平行度測定システムおよび上下定盤面間距離調整方法
【課題】
上下定盤面平行度を高精度で簡易に、かつ高精度で測定する。
【解決手段】
上下定盤面平行度測定用ボード3は、ボード本体31には測定ユニット32の装着部が複数形成され、測定ユニット32は、上定盤21面と下定盤22面との距離に応じて変位する上方付勢された変位子を備えた変位機構部と、変位機構部における変位子の、上定盤21面と下定盤22面との距離が最小となったときの当該距離に相当する変位値Aをデジタル計測する上下定盤面間距離計測部と、上下定盤面間距離計測部122の計測結果を出力する計測結果出力部とを備える。
(もっと読む)
位置測定装置用の伸長可能な脚部アセンブリ
座標測定機など測定機用の伸長可能な脚部アセンブリ(8;30)を記載する。伸長可能な脚部アセンブリ(8;30)は、第1の端部および第2の端部を備え、第1の端部と第2の端部の間の間隔を測定するための計測装置を備える。計測装置は、低い熱膨張係数を有する1つまたは複数の細長計測部材(44、46;76、78)を備える。伸長可能な脚部アセンブリ(8;30)は、枢動接合部によって、1つまたは複数のプラットホーム(4、6;36、38)に取り付けることができる。好ましい一実施形態において、荷重支持構造(50、56)は、脚部アセンブリ(8;30)の計測構造(76、78、80)から機械的に隔離される。 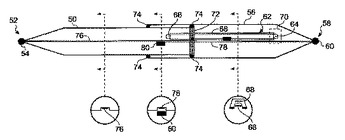 (もっと読む)
(もっと読む)
寸法計測装置
【課題】埃等の影響を受けることなく精度を保つことができ、保護用ケーシングに囲まれている場合であっても、容易にロックの操作が可能な装置を提供する。
【解決手段】弾性伝動部材(70a、70b、72)によって、移動キャリッジ(35)に接続されることにより、該移動キャリッジ(35)の直線移動を行う駆動装置と、移動キャリッジ(35)に取り付けられ、測定される部分に接触して物品形状を導くプローブと、移動キャリッジ(35)に力が作用し、移動キャリッジ(35)に作用した力が伝動し、該伝動した力により変形自由となることが可能な弾性伝動部材(70a、70b、72)によってロック解除状態となると共に、伝動した力が弾性伝動部材(70a、70b、72)に影響することなく伝達されることでロック状態にできる連結手段(62、82)とを含み、移動キャリッジ(35)およびガイドが配置された保護区域を囲む保護ケーシングを含む。
(もっと読む)
変位センサおよび表面性状測定装置
【課題】微小変位を高精度に検出する変位センサを提供する。
【解決手段】測定子110の変位をエデンバネ機構411〜448を備えた変位拡大機構部400によって拡大し、この拡大された変位を変位検出手段600で検出して測定子110の変位量および変位方向を検出する。エデンバネ機構411〜448は、2枚の板バネ310、320を平行に近接配置した構成である。変位拡大機構部400は、8つのエデンバネ機構411〜448を備える。8つのエデンバネ機構411〜448は、円周上に等間隔に配設されている。
(もっと読む)
測定器
【課題】 操作性が高く、かつ、検出精度、検出分解能が高い測定器を提供する。
【解決手段】 スピンドル300の回転に応じてスピンドル300の異なる回転角に対して異なる値の位相信号を発信する位相信号発信手段400と、位相信号を演算処理してスピンドルの絶対位置を求める演算処理部500と、を備える。位相信号発信手段は、位相信号を所定のピッチで発信する。スピンドル300の異なる回転角に対して位相信号は異なる値であるので、位相信号からスピンドル300の回転角が一義的に決定される。インクリメンタル式と違って、位相信号の読み飛ばし等が問題とはならないので、スピンドル300の高速回転を許容して測定器の操作性を向上させることができる。さらに、位相信号の読み飛ばしが問題とはならないので、スピンドル300の回転に対する位相信号の変化を細密化できる。
(もっと読む)
形状測定器
【課題】 接触力を変えながら小さな接触力で被測定物の表面形状を測定できる形状測定器を提供する
【解決手段】 測定プローブ32を傾斜θを持たせて支持する。測定プローブ32の後退する力は、傾斜θによって生じているため、自重mに比べて遙かに小さいmgsigθとなる。一方、エアシリンダ40で押出力Fcで付勢する。このため、ワークWへの測定プローブ32の接触力は、測定子自重傾斜成分mgsigθと、エアシリンダ40の押出力Fcとの差分(F=Fc−mgsigθ)になるので、接触力を非常に小さくすることが可能である。更に、エアシリンダ40で押出力Fcを変えることで、接触力を変えることができる。
(もっと読む)
寸法測定用プローブ
工作機械のような座標位置決め機械上の物体の寸法を測定するプローブは、ワークピース接触用針20を有する。これは、針がワークピースに接触すると、出力を提供する歪ゲージ34を含むセンサー機構30を介して吊り下げられている。プロセッサー16は、歪ゲージの出力を処理し、トリガー信号を発生させる。プロセッサーは、3次元X、Y、Zでのワークピースへの接近の全ての可能性のある方向において等しい感度を保証するアルゴリズムまたは計算式あるいはルックアップテーブルにしたがってそのように行う。  (もっと読む)
(もっと読む)
1 - 20 / 25
[ Back to top ]