
Fターム[2F062HH24]の内容
機械的手段の使用による測定装置 (14,257) | プローブ、測定子 (1,750) | 付勢方向の変更 (32)
Fターム[2F062HH24]に分類される特許
21 - 32 / 32
変位センサおよび表面性状測定装置

【課題】微小変位を高精度に検出する変位センサを提供する。
【解決手段】測定子110の変位をエデンバネ機構411〜448を備えた変位拡大機構部400によって拡大し、この拡大された変位を変位検出手段600で検出して測定子110の変位量および変位方向を検出する。エデンバネ機構411〜448は、2枚の板バネ310、320を平行に近接配置した構成である。変位拡大機構部400は、8つのエデンバネ機構411〜448を備える。8つのエデンバネ機構411〜448は、円周上に等間隔に配設されている。
(もっと読む)
表面性状測定装置

【課題】傾斜を有する被測定物表面を高精度に倣い測定する表面性状測定装置を提供する。
【解決手段】 測定部210により被測定物表面を倣い走査する。測定部210は、接触部212を先端に有するスタイラス211と、接触部212が被測定物表面に当接した際のスタイラス軸方向の測定力を検出する測定力検出手段を有する。移動機構は、測定力を一定にしながら測定部210を被測定物表面に対して相対移動させる。
移動機構は、接触部210を回転中心として測定部210を回転させてスタイラス211を被測定物表面に垂直にする回転機構400を備える。
(もっと読む)
表面形状測定装置
【課題】 傾斜面を有する被測定物表面Sの形状を加振型接触式プローブにて測定する表面形状測定装置を提供する。
【解決手段】 接触部212に作用する測定力を検出する測定力検出回路219を有する加振型接触プローブにより構成される測定部210と、測定部210を被測定物表面Sに対して相対移動させる移動手段(三次元駆動機構300、上下駆動機構220)と、測定力検出回路219からの出力される測定力の大きさに基づいて移動手段を制御する駆動制御部400と、を備える。駆動制御部400は、測定力が倣い指定測定力となるように接触部を被測定物表面Sに沿って倣い移動させる倣い測定制御部410と、タッチ検出測定力で接触部212を被測定物表面Sに断続的に接触させるようにして被測定物表面Sをタッチ測定する動作を連続的に実行させるタッチ測定制御部420と、を備える。
(もっと読む)
接触式触覚センサの制御方法およびそのシステム
【課題】物体の3次元形状の計測の高速化を図り、物体の3次元形状を計測する際の計測時間を短縮化する。
【解決手段】駆動電極と帰還電極とを有する圧電振動板と、上記圧電振動板に固着された針とを有し、上記駆動電極に交流電圧を印加することにより上記針が微小振動する一方で、上記帰還電極からは上記針の振動に応じた帰還電圧が出力される接触式触覚センサの制御方法において、所定の基準振幅値と現在の振幅値との差分から接触式触覚センサと測定対象物との相対距離を得る第1のステップと、上記第1のステップで得た相対距離の変化の履歴に基づいて、上記接触式触覚センサの速度を得る第2のステップとを有する。
(もっと読む)
方向変化検出手段を有する接触プローブ
寸法測定用プローブ(10)が工作機械(48)に搭載されており、工作機械(48)は、少なくとも1つの軸A周りにプローブの方向を変える。歪ゲージ(34)が、プローブの触針(20)がワークピース(50)に接触したときを検知して、トリガ信号が生成される。プローブが方向を変えると、誤トリガ信号が生成されることがある。これを克服するために、触針の振動によって生じる歪ゲージ出力の変動の変化をモニタすることによって、方向変化を検出する。 (もっと読む)
多関節測定アームの回転軸受
ポータブル座標測定器は、連接アーム区分材を有する多関節アームを備える。連接アーム区分材は、回転シャフトと、少なくとも2つの離間された軸受と、軸受と回転シャフトを取り囲むハウジングと、を備え、軸受のための案内溝が以下のうちの少なくとも1つによって構成される。(1)シャフトが2つの軸受のうちの少なくとも一方の内側案内溝を構成する。(2)ハウジングが2つの軸受のうちの少なくとも一方の外側案内溝を構成する。  (もっと読む)
(もっと読む)
プローブ用の測定ヘッド
【課題】 特に割り出し精度に影響するような機械的応力を割り出し位置に導入することなしに、軸を中心とする回転が正確に実施されるプローブ用の測定ヘッドを提供する。
【解決手段】支持要素(30)と、該支持要素(30)に接続され、支持要素(30)に対して第一軸(B)を中心に回転可能な第一可動要素(40)と、第一軸(B)を中心に回転することができるように接続された、回転動作体(90)と、第一軸(B)から一定の距離(a)で第一軸(B)を中心に回転動作体(90)を駆動するための、支持要素(30)と回転動作体(90)との間における第一伝導装置(86、92)と、第一可動要素(40)を駆動するための、回転動作体(90)と第一可動要素(40)の間における第二伝導装置(94、95)とを備える。
(もっと読む)
触知三次元座標測定機の検出ヘッド用センサーモジュール
【課題】連続的測定過程をより簡単に、かつより正確に実施することができるようなセンサーモジュールを提供する。
【解決手段】触知三次元座標測定機の検出ヘッド用センサーモジュールには、固定されたモジュール基部を形成し、それによって最初の測定面60を規定するフレーム42を有している。移動部44は、ウェブ46によってフレーム42に接続されている。本発明の一局面によれば、各ウェブ46には、最初の測定面60に対して垂直な断面で見た場合、2つの薄い材料のウェブ部分52、54の間に配置された厚い材料のウェブ部分50がある。厚い材料のウェブ部分50は、薄い材料のウェブ部分52、54の対応する材料厚さdsより大きい材料厚さDsを有している。
(もっと読む)
三次元測定探触体
【課題】 位置決め誤差のおそれなしに位置決めを実施することができる、割り出しされた複数の方向に向けることのできるトリガ付探触子を提供する。
【解決手段】 固定部品(250)と、固定部品に対して第1軸の周囲を回転可能である可動部品(210)と、可動部品の回転を禁止する固定位置に、軸方向の弾性手段と、固定部品と可動部品との間に6つの接触点を画定している割出部品と、固定部品から可動部品を解除することにより、第1軸の周囲で可動部品が回転することを可能にするための、弾性手段に対抗しているアクチュエータとを含み、可動部品が、固定位置にあるときには、6つの接触点と弾性手段との接続を除いて、固定部品と可動部品との間に、接触箇所が存在しない。
(もっと読む)
トリガ付探触子
【課題】 単純で信頼性があり、横力に対する一定の感度を有する探触子を提供する。
【解決手段】 接触ロッドのプレート(13)と一体化した6個の可動位置決部品(131、132、133、134、135、136)を有すると共に、固定機構と一体化した6個の固定位置決部品(141、142、143、144、145、146)を有し、該6個の固定位置決部品が、6個の可動位置決部品と、六つの接触点を画定するように組み合わされていると共に、六つの接触点が、接触ロッドの長手方向中心軸を中心に放射状に配分され、接触ロッドの長手方向中心軸に対して、直交する平面における偏向力に対して、均一な感度が得られるようになっている。
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
座標測定装置、方法、コンピュータプログラムプロダクト
本発明は、部材(7)上の各測定値を、偏向可能な接触探知ピン(6)を備えた測定接触探知ヘッド(5)を有する座標測定装置を用いて測定するための方法であり、その際、座標測定装置により、各パラメータ(A)を用いて、測定接触探知ヘッド(5)によって検出された単数乃至複数の偏向信号を、当該座標測定装置の座標系(XM,YM,ZM)内でリニア又は非リニアに写像(変換)することができる。方法を、任意に測定する接触探知ヘッド、殊に、接触探知ピンが座標方向に可動に案内されない接触探知ヘッドにも使用することができるようにするために、各パラメータの少なくとも一部分(Aanti)を用いて、接触点において、部材の表面に対して接線方向に位置している、接触探知ピン偏向の各成分を記述する。 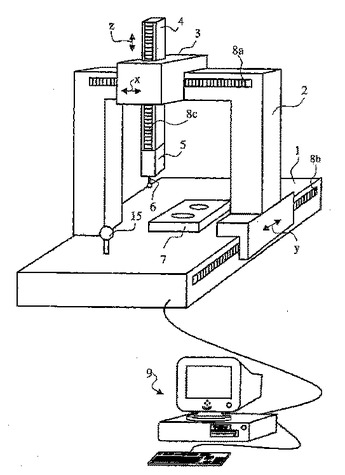 (もっと読む)
(もっと読む)
21 - 32 / 32
[ Back to top ]