
Fターム[2F063GA53]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 磁気的手段を用いた検出器 (1,967) | 磁電変換素子、磁気抵抗素子、ホール素子 (722) | 空隙変化型 (11)
Fターム[2F063GA53]に分類される特許
1 - 11 / 11
電子機器
【課題】 ヒンジ機構により開閉可能に支持された第1の筐体及び第2の筐体の開閉を磁場を用いて検出する電子機器において、磁場発生手段と磁場検出手段とを対向する位置に配置しなくても正確に開閉を検出できるようにする。
【解決手段】 カメラ本体と可動部とを閉じた状態において、可動部に設けられた磁石とカメラ本体に設けられたホール素子とが対向しない位置に、磁石の着磁方向とホール素子の磁場検出方向とが略直交するように磁石とホール素子を配置する。
(もっと読む)
タイヤ半径測定装置、タイヤ半径の変位測定方法及び車輪

【課題】タイヤ半径を高精度に測定する。
【解決手段】シート状の第1の磁石11、第2の磁石21をトレッド部2の内周面側に貼り付け、第1の磁気検出素子12、第2の磁気検出素子22を、磁石11、21と対向させてリムウェル部4に設ける。磁気検出素子12、22毎にその測定値について、変位が生じる前の、出荷時等といった基準状態における基準測定値Mr1、Mr2に対する測定値の変位を演算する。変位が最大となる測定値は、接地面からの影響を受けている可能性があると判断し、この測定値を除く他の測定値のみを、トレッド部2とリムウェル部4の間の距離を表すタイヤ半径相当値RRとし、このタイヤ半径相当値RRに、タイヤ中心からリムウェル部4までの距離などを表す予め検出した定数を加算してタイヤ半径Rを演算する。
(もっと読む)
差動アセンブリ及び差動アセンブリを備えた駆動アセンブリ
本発明は、特に電気モータによって駆動可能な自動車駆動軸のための差動アセンブリに関する。差動アセンブリ2は、駆動歯車6と、入力部分13及び2つの出力部分20,22を有する差動駆動装置3とを有しており、出力部分20,22が入力部分13に駆動的に接続されており、かつ互いに対して差動効果を有しており、駆動歯車6と差動駆動装置3との間に有効に配置された継手4を有しており、継手4の閉鎖条件においてトルクが駆動歯車6から差動駆動装置3へ伝達され、継手4の開放条件においてトルクの伝達が中断されるようになっており、継手4を作動させるための制御可能なアクチュエータ5と、継手4の少なくとも3つの切替位置を決定するためのセンサ44とを有する。さらに、本発明は、このような差動アセンブリ2を備えた駆動アセンブリ47に関する。  (もっと読む)
(もっと読む)
回転角検出装置
【課題】部品点数の増大を抑制し、必要な精度を有する回転角検出装置を提供すること。
【解決手段】ハウジングに回転軸の回転に連動して軸方向に変位しつつ回転自在に支承される磁石ホルダと、磁石ホルダ端面に磁石ホルダ回転軸に対し径方向にオフセットして配置された磁石と、磁石ホルダ回転軸の軸心延長線上に磁石と対向して設置される磁気検出器と、磁気検出器の出力信号を処理して前記回転体の回転角を検出する回転角度演算部とを備える構成とすることで、磁石および磁気検出器がそれぞれひとつであっても、回転体の360度以下或いは360度超の回転角を検出することのできる簡単な構成で安価な回転角検出装置を提供する。
(もっと読む)
移動体位置検出装置
【課題】コンピュータに依存することなく、装置の故障を検出すること。
【解決手段】円筒状の磁石42が固定され傾倒可能に配設された移動体(シフトレバー4)と、磁石42の周面に対向配置され移動体の直交する方向の傾倒量を検知するGMRセンサ71、72と、磁石42の周面に対向配置されGMRセンサ71、72のいずれの検知面とも平行でない位置に検知面が配置されたGMRセンサ73と、GMRセンサ71、72による検知値と、GMRセンサ73による検知値とに基づいて少なくともGMRセンサ71〜73のいずれか1つの故障を判定する判定回路(加算回路74、比較回路75)とを具備することを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】操舵限界に達したときに加わる衝撃を抑えるとともに、車両への搭載性を向上させることができる電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、電動パワーステアリングユニット4を備えている。電動パワーステアリングユニット4は、トーションバー40と、モータ41と、減速装置42と、ステアリングシャフトねじれ方向検出装置43と、操舵限界検出装置44と、モータ制御回路とから構成されている。これら電動パワーステアリングユニット4の構成要素は、ハウジング45の回りに一体化されている。モータ制御回路は、操舵限界検出装置44の検出結果に基づいて、タイヤ52の装着された車輪53の回転角度が所定角度範囲を超えたとき、モータ41を停止させる。これにより、操舵限界に達したときに加わる衝撃を抑えるとともに、車両への搭載性を向上させることができる。
(もっと読む)
回転ユニットを有する携帯型電子装置
本発明は、携帯型電子装置であって、筐体と、前記筐体に対して回転され得る回転ユニット1と、前記回転ユニットの回転位置を検出する検出手段と、を備え、前記検出手段が、前記回転ユニットに装着され、磁界を供給する磁界伝送器10と、前記筐体に装着され、磁界センサ103及び前記磁界センサを介して前記磁界を増加させる磁束ガイド構成を含む磁界受信器11と、を含む、携帯型電子装置に関する。  (もっと読む)
(もっと読む)
位置検出装置
【課題】 検出特性が異なる2種類の非接触式のセンサを用いる場合でも、センサを配置するための大きな基板設置スペースを設けることなく、各センサから適切な検出信号を得ることができる位置検出装置を提供する。
【解決手段】 シフトレバー10に設置した多極マグネット板15のシフトレバー10と反対側に、多極マグネット板15との間に所定の距離を設けて所定の厚みを有する1枚の基板16を設置して、ON・OFFセンサS1〜S4を基板16の表面(多極マグネット板15側の面)に配置し、リニアセンサRを基板16の裏面(多極マグネット板15と反対側の面)に配置した。
(もっと読む)
回転角検出装置
【課題】 車両運転時以外には角度位置の追跡をしなくても、ステアリングの絶対回転角度を検出可能として、消費電力を低減する。
【解決手段】 ステアリングシャフト1に対して回転方向には一体で軸方向にはスライド可能のロータ10にスクリュー12を形成し、これをベースのナット部5に噛み合わせ、回転に応じて軸方向に移動可とする。ロータは厚さが徐々に増大する帯状の永久磁石を螺旋状に巻きつけた軸傾斜永久磁石20と駆動歯車14を備え、軸傾斜永久磁石の外周面にホール素子を対向させる。駆動歯車に噛み合う従動歯車31には永久磁石32を固定し、これに対向させてAMRセンサ33を配置する。ホール素子が対向する軸傾斜永久磁石は操舵の全角度範囲にわたって厚さが変化するので、その出力から現在の粗の絶対回転角度が得られる。これと高分解能のAMRセンサの出力とに基いて、高精度の絶対回転角度を得る。
(もっと読む)
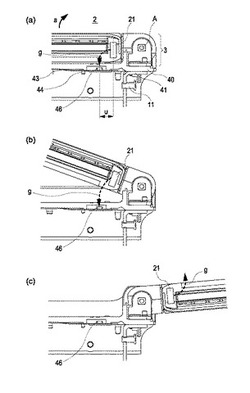
移動するストリップの層厚を測定する装置及び方法
本発明は、移動ストリップ2の少なくとも1層の厚さを測定する装置1と方法とに関するものである。該測定装置1はトランスミッタ本体4を含み、トランスミッタ本体は、トランスミッタ・ハウジング3内を軸方向に可動であり、ガス・クッション2を介してストリップ層に載置される、ハウジング3から突出したセンサヘッド5と、トランスミッタ・ハウジング3内に画成されたチャンバ7内へ延びる上部6とを有している。トランスミッタ・ハウジング3は、ガス供給用の少なくとも1つのポート9を備え、このガスの一部は前記ガス・クッションを形成し、また一部はチャンバ7内へ流入する。この測定装置の特徴は、トランスミッタ・ハウジング3が、チャンバ7からガスを排出するためのリストリクタ10を備えていることである。また、この測定方法は、測定装置1によりストリップ層2を測定する段階を含み、該リストリクタ10は、ストリップ層2に対するガス・クッションの圧力が0−65g/cm2重量等量となるように調節される。  (もっと読む)
(もっと読む)
角度センサを備える検出装置
相互に回転可能な第1の部分(2)と第2の部分(3)からなる構造に対する角度センサ(1)を備える検出装置であって、回転は回転軸(5)によって定義される。第2の部分(3)と結合された前記角度センサ(1)は、第1の部分(2)とともに回転に関与する磁石装置(4)により生成される磁界(B)の、回転角(α)に依存する正弦成分と余弦成分(s,k)を検出する。360°よりも大きい角度を検出するために、相対的な回転角(αrelativ)に加えてさらに別の成分として、絶対的な回転角(αabsolut)に依存して所定の仕方で変化する磁場(B)の数値も判定され、この変化は、相対的な回転角(αrelativ)と磁界(B)の数値の論理演算によって角度表示の多義性が排除される程度の大きさである。 (もっと読む)
1 - 11 / 11
[ Back to top ]