
Fターム[2F063JA07]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | その他の検出器 (142) | 加速度計 (12)
Fターム[2F063JA07]に分類される特許
1 - 12 / 12
長尺材の変位量測定装置
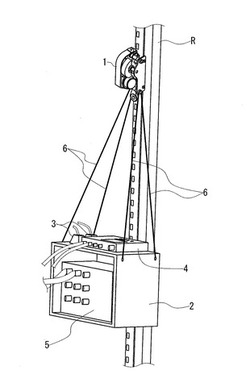
【課題】長尺材のうねり(変位量)を簡易かつ正確に測定することができる長尺材の変位量測定装置を提供する。
【解決手段】変位量測定装置は、定速走行部1と、架台2と、加速度計3と、記録計4とを備える。定速走行部1は、上下方向に伸びる長尺材(ガイドレールR)に沿って定速で走行する。架台2は、この定速走行部1と共に長尺材に沿って移動される。加速度計3は、架台2の平面方向の加速度を計測する加速度計であって、長尺材のうねりに応じて傾いた架台2の平面方向に生じる重力の加速度成分を計測する。記録計4は、加速度計3の計測結果を記録する。この計測結果と定速走行部1の走行速度とを利用することで、長尺体の変位量を演算により求めることができる。
(もっと読む)
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体

【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
データ処理装置、データ処理方法、データ処理装置用プログラム、データ処理システム、および、センサ装置
【課題】可撓性のシート体の形状変化および動きを求めることができるデータ処理装置等を提供する。
【解決手段】複数の加速度センサSが配置された可撓性のシート体(11)から、当該シート体の変位による加速度データを取得し(S2)、加速度データから角加速度を算出し、算出された角加速度から角度変位を算出し(S3)、配置された加速度センサの位置と算出された角度変位とから、少なくとも2つの加速度センサが互いにリンクしたリンク機構のモデルに基づき、変位後の加速度センサの位置を推定する(S4)。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
角度測定装置
【課題】ねじ接続部を締め付けるための操作工具(50)の締め付け角度を測定するための角度測定装置(10)であって、該操作工具(50)に取り外し可能に固定される形式のものにおいて、従来技術の欠点を回避し、異なる操作工具に結合可能な次のような角度測定装置、すなわち、回転角度測定に外部の基準部を必要とせず、とりわけ基準アームを必要としない角度測定装置を提供することである。
【解決手段】回転角度を電子的に検出するための回転角度測定センサ(20)を有することを特徴とする角度測定装置。
(もっと読む)
車両データを、とりわけホイールで走行する車両の速度を測定する装置
第1のセンサ(10)と第2のセンサ(20)を有するホイールで走行する車両の速度を測定するための測定装置。これら2つのセンサは同一のホイール(5)に取り付けられている。前記両センサとも、前記ホイール(5)の軸に対してそれぞれ垂直に作用し、互いに対してある角度をなす力を測定するように配置されている。さらに前記2つのセンサ(10,20)の測定値を受け取る評価装置(30)が設けられており、前記評価装置は前記両センサ(10,20)の測定値から前記ホイール(5)の車両走行方向における加速度を求める。  (もっと読む)
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】タイヤの横方向の加速度を検出する加速度検出手段16を設けると共に、制御手段15がこの加速度検出手段16と第一及び第二の回転検出手段9、10の各検出信号から、回転体1の回転角度を検出することによって、例えば、これらのデータがある範囲以上異なっている場合には、いずれかが誤っていると制御手段15が判定し、誤ったデータが車両の電子回路に出力されることを防ぐことができるため、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
幾何学的形状の取得のための方法及び装置
本発明は、幾何学的形状を取得する方法及びデバイスに関する。本発明による方法は、1セットのセンサ(4a)をこの形状(曲線又は表面)の上に配置し、各センサが、このセンサの位置における曲線又は表面の向きを表わす信号を出力するステップ、曲線又は表面のモデルを選択するステップ、信号に基づいてモデルパラメータを決定するステップ、及びこれらのパラメータに基づいて幾何学的形状の上のポイントの空間分布を決定するステップを含む。本発明は特に、機械加工、建具、石工術、及び建築の分野への使用に適している。 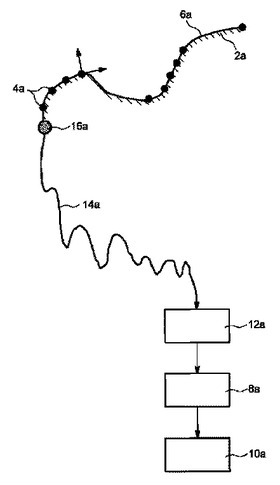 (もっと読む)
(もっと読む)
クレーンの振れ角、捻れ角及び転倒角の検出方法
【課題】揚程が長く、悪環境で使用されるクレーンの振れ角、捻れ角及び転倒角を正確に検出することができるクレーンの振れ角、捻れ角及び転倒角の検出方法を提供すること。
【解決手段】グラブバケット5の本体部6の対角方向に、xyz3軸方向の加速度を検出できる2組の加速度センサS1、S2をそれぞれ配置し、これら2組の加速度センサS1、S2を使用して、クレーンの振れ角、捻れ角及び転倒角を検出する。
(もっと読む)
生体のリハビリ用姿勢モニタリング方法及び装置
【課題】本発明は、3軸加速度計及び3軸角速度計から得られた6軸データの静止状態の零点誤差を補正することにより、動作を正確に測定することを目的とする。
【解決手段】本発明による生体のリハビリ用姿勢モニタリング方法及び装置は、姿勢モニタ部(61)に設けた3軸加速度計(65)及び3軸角速度計(66)から得た6軸データ(62)を慣性演算部(63)に入力し、6軸データ(62)の静止状態(M,N)の零点誤差を補正して高精度に生体(50)の動作を測定する方法と構成である。
(もっと読む)
掘進管先端位置姿勢計測方法及び掘進管先端位置姿勢計測装置
【課題】地磁気が乱れていても、掘進管先端部の水平位置、深さ、傾斜角、回転角、及び方位角を精度よく測定する。
【解決手段】一辺が掘進計画線13と重なるように敷設された電流路22に交流電流を供給する電源21が接続されている。掘進管10先端部に3軸磁界検出器11及び3軸重力方向検出器12が設置されている。重力方向から掘進管先端部の傾斜角及び回転角を求める傾斜角・回転角検出部が設けられている。磁界の交流成分と電源からの同期信号から掘進管先端部の方位角を求める方位角検出部33が設けられている。磁界の交流成分から掘進管先端部の水平位置及び深さを求める水平位置・深さ計測部35が設けられている。
(もっと読む)
1 - 12 / 12
[ Back to top ]