
Fターム[2F065AA38]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 物体の姿勢 (755) | 表裏又は特定の向き (11)
Fターム[2F065AA38]に分類される特許
1 - 11 / 11
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
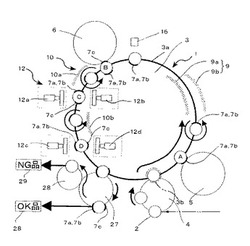
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
ボタンの表裏判別装置

【課題】外周縁の断面形状が表裏で異なるボタンの表裏を確実に判別することのできるボタンの表裏判別装置を提供する。
【解決手段】ボタンBが載置される載置面Waと、載置面Waに斜光Laを照射する斜光照明装置7と、記斜光Laが載置面Waに照射された際に、載置面上に形成されるボタンBの影が投影されるように、複数の受光素子が配列されて載置面Waに埋設されたイメージセンサ3と、イメージセンサ3の出力電圧を所定の検出レベルと比較することにより、ボタンBの影を検出する検出手段16と、検出レベルを、斜光照明装置7からのイメージセンサ3の各受光素子の距離に応じて斬減するように設定する検出レベル設定手段19と、斜光Laを照射した際に、前記検出手段16で検出された影の長LSさに基づいてボタンBの表裏を判別する制御手段5とを設ける。
(もっと読む)
顔向き検出装置
【課題】 1つの画像から各スリット光と照射角度とを特定できる顔向き検出装置を提供する。
【解決手段】 顔向き検出装置1は、運転者の顔位置に、隣接するスリット光に対する太さの比率を他のスリット光と異ならせた基準スリットを含む複数のスリット光を照射する複数スリット光源2と、運転者の顔位置を撮像するカメラ3と、撮像したスリット光画像から基準スリット光を抽出し、基準スリット光を基準として各スリット光が複数スリット光源2からどの角度で照射されたスリット光であるのかを特定し、光切断法により運転者の顔の向きを判定する制御部4と、を備えた。
(もっと読む)
側面検査装置
【課題】被検査物の側面の全周検査を、1台のCCDカメラを用いて高速かつ効率的に精度良く行えるようにすることを課題としている。
【解決手段】外径面2aが鏡面、内径面2bがプリズム面として構成されたコーンレンズ2と、カメラ1と、環状光源3を有し、これ等が検査部中心Cと同軸上に配置され、環状光源3からの照明光をコーンレンズ2に通し、内径面2b、外径面2aで順に反射させて検査部Bに導き、その照明光で検査部Bに送り込まれる被検査物Aの搬送面10a上に置かれた部分の外周の側面を照明し、その側面の全周の画像を前記外径面2a、内径面2bで順に反射させてカメラ1に取り込むようにした。
(もっと読む)
吸着部品表裏判定装置及び吸着部品表裏判定方法
【課題】部品実装機の吸着ノズルに吸着した部品を側面方向からカメラで撮像した画像に基づいて簡単な処理で該吸着部品の表裏を判定できるようにする。
【解決手段】吸着ノズルに吸着した部品を側面方向(水平方向)からカメラで撮像して吸着部品の側面の画像を取り込んで画像処理する。そして、画像に表される吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置を測定し、該吸着部品の左右両端又はいずれか一方の端の高さ位置と該吸着部品の最下端の高さ位置との差分値を算出して、該差分値が表裏判定しきい値以上であるか否かで、該吸着部品の吸着姿勢が表裏反対であるか否かを判定する。
(もっと読む)
吸着ノズルと被吸着部品の側面画像取得装置
【課題】ノズルホルダの回転方向において作業位置より先方の先行位置及び後方の後行位置に割出された吸着ノズルと該吸着ノズルに吸着された部品の先行位置側面像および後行位置側面像を一台の側面撮像カメラで一画面上に互いに異なる画像面積で撮像可能とする。
【解決手段】ノズルホルダ17の回転方向において作業位置S1より先方の先行位置S1+1及び後方の後行位置S1−1に割出された吸着ノズル18と該吸着ノズルに吸着された部品Pの先行位置側面像および後行位置側面像は、第1光路49aおよび第2光路49bで一台の側面撮像カメラ21に導入され、先行位置側面画像77aおよび後行位置側面画像77bとして一画面78上に撮像される。そして、先行位置側面画像および後行位置側面画像の一方が他方より一画面上において占める面積が大きくなるように第1光路および第2光路が設定されている。
(もっと読む)
部品の平面部および基準周方向箇所の判定装置および判定方法
【課題】円柱状部品を平面部判定しかつ基準周方向箇所を判定可能な、簡単で処理判定時間の短い判定装置および判定方法を提供する。
【解決手段】部品1が第1平面部1bを第1発光手段4に対面させて載置台8に載置されている状態で部品1を回転させて、基準周方向箇所Xが所定の周方向位置Yと一致したときに、第1光4aが部品1の貫通孔1aを通過して、第1受光手段5が第1光を受光可能となり、部品1が第2平面部1cを第2発光手段6に対面させて載置台8に載置されている状態で部品1を回転させて、基準周方向箇所Xが所定の周方向位置Yと一致したときに、第2光6aが部品1の貫通孔1aを通過して、第2受光手段7が第2光6aを受光可能となるように、第1発光手段4と、第1受光手段5と、第2発光手段6と、第2受光手段7とが、載置台8に載置されている状態の部品1に対して配置されている判定装置。
(もっと読む)
推定装置
【課題】処理開始直後から安定した推定結果が得られ、且つ、推定精度を向上させること可能な推定装置を提供する。
【解決手段】顔モデル供給部6は、初期化指令が入力され個人顔モデル学習部62での処理が起動すると、平均顔モデル記憶部61に記憶された平均顔モデルSAが顔モデル切替部63を介して頭部姿勢を求めるためのアフィンパラメータAtを推定する推定部8に供給する。また、個人顔モデル学習部62では、推定部8にて画像上の特徴点を追跡した結果(観測値)を取得して、個人顔モデルSPの学習を実行し、その個人顔モデルSPの自由エネルギーが、平均顔モデルSAの自由エネルギーより大きくなった時点で、個人顔モデルの学習を終了し、推定部8に供給する顔モデルCaを、平均顔モデルSAから個人顔モデルSPへ切り替える。
(もっと読む)
木材の検査方法及び木材の検査装置
【課題】木材の表裏を高い精度で正確且つ確実に判定することができる木材の検査方法及び木材の検査装置を提供する。
【解決手段】板状に加工された木材Aの木口面Aaを撮影し、撮影された画像を2値化処理して年輪線Abを抽出するととともに、抽出した年輪線Abの画素データをモデルパターンと比較して年輪線Abの方向性を求め、求められた年輪線Abの方向性から木材Aの表裏を判定する。
(もっと読む)
コイルばねの方向判別装置
【課題】 不等ピッチコイルばねの方向判別精度を高めること。
【解決手段】コイルばね1の径方向両側に、光センサ3の投光部3aおよび受光部3bを対向配置する。光センサ3をコイルばね1の軸線方向に相対移動させたときに受光部3bから得られる出力値をコイルばね1の軸線方向の位置と関連付けて記憶する記憶手段5と、記憶手段5に記憶された受光部3bの出力値とコイルばね1の軸線方向一端から当該出力値に対応するコイルばね1の軸線方向の位置までの距離を乗算した第1の乗算値をコイルばね1の軸線方向に積分した第1の積分値、および、記憶手段5に記憶された受光部3bの出力値とコイルばね1の軸線方向他端から当該出力値に対応するコイルばね1の軸線方向の位置までの距離を乗算した第2の乗算値をコイルばね1の軸線方向に積分した第2の積分値をそれぞれ演算する演算手段6と、第1の積分値と第2の積分値の大小関係を判別する判別手段7を設ける。判別手段7によって、コイルばね1の方向性を判別する。
(もっと読む)
ベルト特性検出方法、及び、ベルト特性検出装置
製品タイヤの品質管理を高めることができるベルト特性検出方法、及び、ベルト特性検出装置を提供することを課題とする。
ベルト特性検出装置は、ドラム21上に貼付されたベルト22の特性を検出する装置であり、ドラム回転軸に沿ったドラム外周面上の直線上の2点の照射位置28R、28Lにレーザ光をそれぞれ照射し、各反射光を計測することにより照射位置28R、28Lの半径方向変位を計測するレーザ変位計と、レーザ変位計から計測信号を受信し、照射位置28R、28Lの半径方向変位の差分を算出する演算部と、演算部で算出された差分の正負と、ドラム21の回転方向と、に基づいて、ベルト22の進行方向Rの端縁22Eの向きが右上がりか左上がりかを検出する検出部と、を備えている。これにより、差分の正負によって、端縁28Eが右上がりか左上がりかを容易に検出することができる。
(もっと読む)
1 - 11 / 11
[ Back to top ]