
Fターム[2F065CC34]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | トロリー線 (55)
Fターム[2F065CC34]に分類される特許
21 - 40 / 55
部材検査装置
【課題】複検査対象物の外観検査を所望の検査態様に応じて低コストで行うことが可能な部材検査装置を提供する。
【解決手段】部材検査装置1は、所定の画角をもって撮像することが可能な撮像手段4と、撮像手段4で撮像された画像を生成し、解析する画像処理手段5と、検査対象物Sの少なくとも一方向Xに対応する方向の画角を変化させるように、検査対象物Sからの光を反射させて、撮像手段4に入光させる反射手段3とを備える。
(もっと読む)
画像処理によるトロリ線の摩耗および偏位測定装置

【課題】ひとつの装置でトロリ線の摩耗量及び偏位量を測定可能なトロリ線の摩耗測定装置を提供する。
【解決手段】ラインセンサ2によって撮像された画像を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、ラインセンサ画像に対して二値化処理を行って二値化ラインセンサ画像を作成する判別分析二値化処理部4bと、二値化ラインセンサ画像に対して摩耗部分の両側のエッジを検出するトロリ線摩耗部分エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の重心位置を検出するトロリ線重心位置検出部4eと、トロリ線の重心位置からトロリ線の実際の偏位量を検出するトロリ線偏位実座標変換計算部4fと、少なくともトロリ線偏位実座標変換計算部4fによる処理と並行してトロリ線の摩耗量を検出するトロリ線摩耗部分幅計算部4gとを備えるようにした。
(もっと読む)
摩耗測定装置及び摩耗測定方法
【課題】画像処理によりトロリ線の摩耗を測定するための摩耗測定装置及び摩耗測定方法を提供する。
【解決手段】トロリ線42を撮像するラインセンサ10からの輝度信号を基にラインセンサ画像を作成する手段と、前記ラインセンサ画像の各画素について輝度値が所定の閾値未満の画素を黒部31とし所定の閾値以上の画素を白部30とする二値化処理を施して二値化ラインセンサ画像を作成する手段と、点在する縞状白部32を連結して補間後二値化ラインセンサ画像を作成する手段と、前記補間後二値化ラインセンサ画像に対してノイズ除去処理を施しノイズ除去後二値化ラインセンサ画像を作成する手段と、前記ノイズ除去後二値化ラインセンサ画像において前記トロリ線42の線摩耗部のエッジ検出を行いエッジデータ34を作成する手段と、前記エッジデータ34を用いトロリ線摩耗部幅の計算を行う手段とを備えた。
(もっと読む)
画像計測装置及びその校正方法
【課題】容易かつ高精度で変換テーブルを求めることができる画像計測装置及びその校正方法を提供する。
【解決手段】画像計測装置において、スリット光源3からのスリット光3aと直交し、かつ、平行移動可能な1本の校正棒2を用い、少なくとも4箇所以上の位置に校正棒2を平行移動して、校正棒2におけるスリット光3aの反射点をITVカメラ4で撮像し、撮像した画像から当該反射点の画像座標を取得すると共に、当該反射点の実座標を取得し、取得した画像座標と実座標の4つ以上の組から、変換テーブルを求める。
(もっと読む)
画像処理によるトロリー線支持金具の位置測定装置
【課題】曲線引き金具の設置角度を小型の装置で安全に測定する。
【解決手段】車両9に設置されて連続的にトロリー線7の近傍を撮像するラインセンサ2と、ラインセンサ2の出力信号を処理して支持金具8の接近を検知する信号処理部3とを備え、車両9に設置したITVカメラ4が、信号処理部3が出力する検知信号に基づいて支持金具8を撮像し、撮像された画像を車両9に設置した画像処理部5で画像処理することによりトロリー線7の支持金具8の位置および角度を測定するようにした。
(もっと読む)
画像処理による曲線引き金具測定装置
【課題】曲線引き金具の設置角度を小型の装置で安全に測定する。
【解決手段】可視光を照射する投光器1と、曲線引き金具6を撮像するカメラ2と、カメラ2の映像を記録する画像記録部3と、画像記録部3から入力される映像を画像処理して曲線引き金具6の設置角度を求める画像処理部4とを備え、画像処理部4が、画像処理によって映像中のエッジを検出し、検出したエッジの量に基づいて映像中に曲線引き金具が撮像されているか否かを判定すると共に、エッジのうち垂直方向に延びる垂直エッジをトロリー線5として検出し、垂直エッジにT字状に接するエッジを曲線引き金具6として検出するようにした。
(もっと読む)
トロリ線摩耗量測定方法および測定システム
【課題】
手作業によることなく、高い精度でかつ摩耗量算出のデータ処理ロードを軽減して測定することが可能なトロリ線摩耗量測定方法および測定システムを提供することにある。
【解決手段】
この発明は、受光信号に基づいて得られる信号波形に対応する1ラインの摺動面データにおいてトロリ線摺動面の外側の背景レベルの平均値を算出し、この平均値を目安としてこれより上でかつ受光信号の最低レベルより低い第1の基準レベルを得て、この第1の基準レベルで1画面分のデータを二値化してノイズに対応する画面上の孤立点の座標を抽出する。そして1画面分のデータから孤立点を除去することで孤立点ノイズが除去された各1ラインの摺動面データを得る。そして、この1ラインの摺動面データに対して2つのパラメータに対応する摺動面の幅を容易に算出することができる。
(もっと読む)
ラインセンサを利用した計測装置
【課題】画像処理を用いてパンタグラフとトロリ線との間に発生する接触力を精度良く測定する装置を提供するにある。
【解決手段】被測定物3に取り付けられたマーカー14をラインセンサ2で撮影し、ラインセンサ2で取得した画像を画像処理部70〜77で画像処理することにより、被測定物3の位置を測定する測定装置であって、マーカー14は、反射領域14b,14cと非反射領域14a,14d,14eとを交互に配置してなる縞模様状であって、非反射領域14a,14d,14e又は反射領域14b,14cの何れか1つは一方の長手方向(−x軸)に行くに従って幅が両側(+y軸及び−y軸方向)へ一律に拡大する台形状をなし、非反射領域14a,14d,14eと反射領域14b,14cとの境界となる境界線が少なくとも相互に平行な平行直線と、この平行直線に対して傾斜した少なくとも2本の傾斜直線とを含む。
(もっと読む)
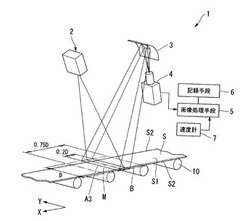
鉄道のトロリ線の状態診断装置
【課題】 検査車両の屋根に2個のカメラをトロリ線に向けて配置し、走行しながら、2個のカメラからトロリ線の長尺ビューア画像を生成し、トロリ線の位置同定を行いながら、トロリ線の状態診断を行うことができる鉄道のトロリ線の状態診断装置を提供する。
【解決手段】 鉄道のトロリ線の状態診断装置において、検査車両1の屋根のこの車両の進行方向に直交する両側に2個のカメラ2,3をトロリ線5に向け傾斜させて取り付け、前記2個のカメラ2,3から得られる画像を長尺ビューア画像として記憶させ、前記トロリ線5の位置同定を行いながら前記トロリ線5の状態診断を行う。
(もっと読む)
ステレオ法を用いたトロリ線偏位測定方法及びその装置
【課題】 2個のカメラを上方に向かって鉛直方向に配置し、簡単にトロリ線の
偏位の測定を行うことができるステレオ法を用いたトロリ線偏位測定方法及びそ
の装置を提供する。
【解決手段】 ステレオ法を用いたトロリ線偏位測定方法において、車両の屋根
上のこの車両の進行方向に直交するように両側に2個のカメラ12,13を水平
で、かつ上方90度(鉛直方向)に向けて配置し、前記2個のカメラ12,13
から得られる画像16,17を合成して、ステレオ法を用いてトロリ線14の偏
位を測定する。
(もっと読む)
トロリ線の支持点検出装置
【課題】
トンネル内トロリ線の支持点を検測車の走行状態においてデータ処理装置の処理ロードを低減でき、さらにトンネル構造の違いで支持点に多少の上下動があっても検出することができるトロリ線の支持点検出装置を提供することにある。
【解決手段】
この発明は、トンネル内においてトンネル壁面に達しない距離限定の距離センサにより斜め方向でトロリ線支持構造物を検出する。これによりトンネル構造に多少の相違があってもトロリ線支持構造物の位置変動に対して距離が稼げ、さらにトンネル壁面の距離変動に対しても検出する対象に対して距離限定がされているので、支持点の誤検出を防止できかつセンサ検出によりデータ処理装置の処理ロードを低減できる。
(もっと読む)
渡り線測定装置
【課題】パンタグラフと接触していない渡り線の3次元的位置を1台のカメラで非接触に求める装置を提供するにある。
【解決手段】渡り線2を見上げるように車両1の屋根に設置された渡り線用ラインセンサ10と、パンタグラフ6周辺に向けて車両1の屋根に設置されたパンタグラフ用ラインセンサ11と、渡り線部の画像上の幅を求めると共に高さを求める渡り線部高さ計算部80と、渡り線部のエッジ中央の値を渡り線重心位置として求めると共に重心位置の中心からの偏位を求める渡り線部偏位計算部90と、パンタグラフの高さ及び位置を求めるパンタグラフ高さ及び位置計算部100と、パンタグラフと渡り線との相対的位置関係を求めるパンタグラフ渡り線相互位置計算部110と、を備えるので、パンタグラフと接触していない渡り線の3次元的位置を1台のカメラで非接触に求めることができる。
(もっと読む)
トロリー線の摩耗量計測装置
【課題】小型化、高効率化、高追従性を図ることができ、安全性の高いトロリー線の摩耗量計測装置を提供する。
【解決手段】隣り合う焦点範囲を撮像可能に設定され、可視光が照射されたトロリー線1を下方側から鉛直上方に向かって同時に撮像を行う複数のカメラ7、8を有し、トロリー線1の高さを焦点範囲とする画像を、カメラ7、8で撮像した画像データからフレーム単位で選択し、選択された画像を画像処理することにより、トロリー線1の摺面の幅を算出すると共にトロリー線1の残存直径を算出し、該残存直径に基づいて、トロリー線1の摩耗量を求めるトロリー線の摩耗量計測装置。
(もっと読む)
空中架線の管理システム
【課題】 電柱に架かる電線等の状態を精度良く、かつ、安価に計測して管理する空中架線の管理装置を提供する。
【解決手段】 車両に搭載され空中架線の画像データを撮影する撮像部と、車両に搭載されレーザを走査することで空中架線に対する距離方位データを取得する距離方位データ取得部と、車両に搭載され前記車両の位置と姿勢角を計測する計算機と、を備え、前記計算機は前記撮像部が撮影した画像データと前記距離方位データ取得部が取得した距離方位データとを入力し、前記画像データから電柱を検出して前記電柱を含む空間面内にある前記距離方位データを抽出し、抽出した前記距離方位データから空中架線に対応する距離方位データを取得して当該距離方位データに基き前記空中架線の地上高を計測するようにした。
(もっと読む)
線状部材検査装置
【課題】作業員の安全を確保すると共に簡単且つ精度良く検査することのできる線状部材検査装置を提供する。
【解決手段】本発明に係る線状部材検査装置1は、線状部材10を撮影するための撮像手段2と、撮像手段2の前面から所定距離離間した位置において線状部材10を保持可能なように形成された線状部材保持手段11と、を備えていることを特徴とし、好ましくは、上端側に撮像手段2が設けられていると共に下端側に撮像手段2の動作を操作するための操作手段14が設けられた延長手段6を備えているのがよい。
(もっと読む)
距離測定方法および距離測定装置
【課題】 危険を犯すことなく簡易に構造物間の距離を算出することができる距離測定方法及び距離測定装置を提供する。
【解決手段】 本発明の距離測定方法は、レーザを利用して、直線状に延びる第1及び第2構造物間の距離を測定するための距離測定方法であって、前記第2構造物上の一点と、前記第1構造物上の二点とに向けてレーザを照射すると共に、該レーザの反射光を受光するレーザ計測ステップS101と、前記レーザの照射方向および該レーザを照射してからその反射光を受光するまでの往復時間に基づいて、前記一点および前記二点の三次元座標を算出する座標算出ステップS103と、前記三次元座標に基づいて、前記第1及び第2構造物間の距離を算出する距離算出ステップS105と、を含むことを特徴としている。
(もっと読む)
トロリー線の摩耗管理方法及び摩耗管理装置
【課題】検出系による異常データを判別して、不要な現地確認作業を削除することができるトロリー線の摩耗管理方法及び摩耗管理装置を提供する。
【解決手段】1ドラムに該当する区間のトロリー線の残存直径hiをn個計測しておき、n個の残存直径hiのデータを用いて、n個の残存直径hiの平均haveを求めると共に、不偏分散σ2=Σ(hi−have)2/(n−1)を求め(ステップS1、S2)、各残存直径hiが、信頼度99%の区間推定値μ[但し、have−2.58×σ/√n<μ<have+2.58×σ/√n]の範囲内に有る場合には、正常データと判定し、上記区間推定値内にない場合には、異常データと判定するステップS3〜S5)。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】2値化ラインセンサ画像の途中でトロリ線がなくなると画像を上下に横断していないのでトロリ線として認識せず背景のノイズとして処理してしまう問題を解決する。
【解決手段】ラインセンサ画像をMライン毎に区切って連続する番号を付したn番目のラインセンサ画像に対して、(n−1)番目のラインセンサ画像におけるMラインのうちのNライン(M≧N)であってn番目のラインセンサ画像に時系列的に連続する予備ライン画像及び(n+1)番目のラインセンサ画像におけるMラインのうちのNラインであってn番目のラインセンサ画像に時系列的に連続する予備ライン画像を連結して(M+2N)ラインよりなるラインセンサ画像を作成するので、画像の途中でなくなるトロリ線を背景のノイズとして処理することがなくなる。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】 剛体架線式において、トロリ線の摩耗部分と剛体部の反射部分とを区別し、トロリ線の摩耗部のみを白域とし、背景を黒域とすることにより、トロリ線の摩耗部分を抽出するにある。
【解決手段】トロリ線の種類を予め設定することにより、前記ラインセンサ画像中のトロリ線の最大幅に相当する画素数以上を持つ白域の部分を黒域に変換する手段61を備え、剛体架線式のトロリ線を撮像した2値化処理後のデータにおいて剛体部を白域から黒域に変換し、カテナリ式のトロリ線を撮像した2値化処理後のデータと同じ画面構成とすることができる。
(もっと読む)
光ファイバセンサー貼付装置および貼付方法
【課題】過剰な重量負荷を掛けない連続固定敷設用の貼付方法や、ロール52非装着でもローラ22〜28で張力を安定付与できる貼付装置10を実現する。
【解決手段】案内ローラ15,16をトロリー線40に係合させ、取込ローラ22,23にて弱い負荷トルクを掛けながら剥離紙付センサー53を取り込み、軸回転自在な転向ローラ24にて装置内順送経路20を前方へ転向させ、強い負荷トルクの張力付与ローラ25にて装置内順送経路20を前方から後方へ更に転向させ、貼付ローラ27,28にて押し付け貼付を行う。このような光ファイバセンサー貼付装置10をトロリー線40に沿って走行させながら、センサー供給具52から剥離紙付センサー53を光ファイバセンサー貼付装置10へ順次送り込む。
(もっと読む)
21 - 40 / 55
[ Back to top ]