
Fターム[2F065FF05]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129) | ステレオ法 (867)
Fターム[2F065FF05]に分類される特許
201 - 220 / 867
障害物検知警報装置

【課題】事前校正を必要とせずに路面と障害物とを識別することができる障害物検知警報装置を提供する。
【解決手段】車載カメラ1による撮像画像に基づいて、撮像画像の各画素に、2次元座標と各画素に対応する被写体の部分から車載カメラ1までの距離とを対応付け、2次元座標と距離とからなる距離マップを作成する距離マップ作成手段6と、距離マップに基づいて、被写体の部分のうち路面に相当する平面Gを特定する路面特定手段7と、を有することにより、路面に相当する平面Gは、従来のように予め用意された3次元位置が既知の多数点から特定されるわけではなく、撮像画像に基づいて特定されるため、従来のような事前校正を必要とせずに路面と障害物とを識別することができる。
(もっと読む)
内視鏡装置およびプログラム

【課題】ユーザに対応点の確認を促すことができる内視鏡装置およびプログラムを提供する。
【解決手段】カーソル位置算出部18aは、入力装置を介して入力される指示に基づいて、画像データに基づく被写体の第1の画像において第1の位置を指定する。対応点算出部18bは、画像データに基づく被写体の第2の画像において、第1の画像における第1の位置に対応する第2の位置を算出する。表示処理部18cは、第1の位置が指定されたときに第1の位置に目印を表示し、続いて第1の位置と異なると共に第2の位置と異なる第3の位置に目印を表示し、続いて第2の位置に目印を表示する制御を行う。
(もっと読む)
照明灯の三次元位置測定方法
【課題】駅構内等の天井部等に設置された多数の照明灯をカメラで撮影し、その画像に基づき多数の照明灯の各々の存在を検出し、その設置位置を三次元的に正確に測定し、照明灯の自動清掃システムを実現する照明灯の三次元位置測定方法を提供する。
【解決手段】本発明に係る照明灯の三次元位置測定方法は、測定対象となる照明灯11を検出する第1ステップS10と、検出した照明灯の三次元位置を測定する第2ステップとS20、その他の複数の照明灯について、測定対象となる照明灯が存在しなくなるまで第1ステップと第2ステップを繰り返す第3ステップS30とからなる方法である。
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】複数のカメラ映像間でオクルージョンが発生し対応点が存在しない場合や、一様な被写体で対応点が複数存在する場合でも、奥行値の誤推定を軽減することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、基準映像と複数の隣接映像とを入力する映像入力手段10と、仮定奥行値ごとに、基準映像の画素の画素値と、当該画素の仮定奥行値の視差に対応する隣接映像の画素の画素値との差分絶対値である隣接映像画素差分値を演算する対応画素差分演算手段20と、閾値により隣接映像画素差分値の平均値または最小値を選択差分値として決定する差分値決定手段30と、選択差分値を仮定奥行値と基準映像の画素位置とに対応付けて記憶する記憶手段40と、画素位置ごとに選択差分値が最小となる仮定奥行値を記憶手段40において探索して奥行値を決定する奥行値決定手段60と、を備えることを特徴とする。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
(もっと読む)
推定装置及びその制御方法、プログラム
【課題】 三次元的に任意の位置姿勢をとりうる物体の位置姿勢を高精度かつ高速に推定するための技術を提供する。
【解決手段】 物体の位置姿勢を推定する推定装置であって、位置姿勢を推定する対象の対象物体を撮像する撮像手段であって、当該撮像手段から該対象物体までの距離情報を表す距離画像を生成する撮像手段と、前記距離画像を解析して前記対象物体の概略の位置姿勢を推定する概略推定手段と、予め定められた位置姿勢の範囲で物体の詳細な位置姿勢を推定する複数の識別手段と、前記概略推定手段が推定した前記概略の位置姿勢に基づいて、前記複数の識別手段の優先順位を決定する決定手段と、前記決定手段が決定した優先順位の順に、前記複数の識別手段を使用して前記対象物体の詳細な位置姿勢を推定する詳細推定手段とを備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】3次元オブジェクトを上方から撮影した画像に含まれている円筒状または円柱状の3次元オブジェクトを検出するための計算コストを減らすことができる。
【解決手段】3次元オブジェクト抽出部13は、画像に含まれる3次元オブジェクトを抽出する。円形図形検出部100は、上面領域の画像の低解像度画像を用いて円形図形のエッジと前記円形図形の中心点とを検出する。また、円形図形検出部100は、円形図形のエッジと円形図形の中心点とに基づいて、画像の領域のうち円形図形が含まれる領域を設定する。また、円形図形検出部100は、円形図形が含まれる領域の画像を用いて円形図形のエッジと中心点と半径とを算出する。3次元位置姿勢計算部21は、3次元オブジェクト抽出部が抽出した3次元オブジェクトのうち、円形図形の中心点と半径とに基づいて、上面が円形状である円筒または円柱状の3次元オブジェクトの形状を検出する。
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 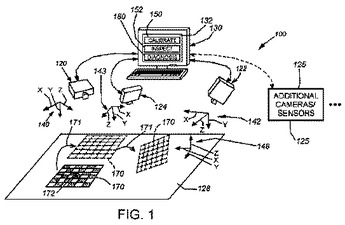 (もっと読む)
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】ロボットの位置を高精度に推定する。
【解決手段】パーティクルフィルタ処理部28が、ランダムに複数のサンプルを設定するサンプル事前設定部72と、設定されたサンプルをカメラ18にて取得されたターゲットの画像に基づいて評価するサンプル評価部74と、当該評価結果に基づいて複数のサンプルを再設定するリサンプリング部76と、サンプルの再設定後に、外部モデルに基づいてサンプルの修正処理を行う第1修正部78と、移動量検出部22の計測結果に基づいて、第1修正部78による修正処理後のサンプルを更に修正する第2修正部80と、を有しているので、移動量検出部に計測誤差がある場合であってもロボットの移動中に実測結果に基づいてサンプルの修正処理を適宜行うことで、ロボットの位置を高精度に推定することができる。
(もっと読む)
三次元計測方法
【課題】 共通視野以外の視野を用いてステレオ計測可能な視野を拡張する。
【解決手段】 そのために、特徴点(X)に対応する第一のカメラのセンサ面上の対応点(xa)、及び前記第一のカメラの焦点位置(F1)、及び前記第二のカメラの焦点位置(F2)を含む平面(平面e)を算出し、平面eと前記第二のカメラのセンサ面を含む平面との交差線である第一の線(直線E)を算出し、前記特徴点群に対応する前記第二のカメラのセンサ面上の対応点群からなる第二の線(直線G)を算出し、
前記第一の線と前記第二の線の交点を前記特徴点(X)に対応する前記第二のカメラのセンサ面を含む平面上の対応点(xb)として算出し、前記対応点(xa)と前記対応点(xb)に基づき特徴点(X)の三次元座標を算出する。
(もっと読む)
三次元撮像装置および物体の三次元画像の生成方法
【課題】三次元の物体の画像を生成する三次元撮像装置を提供する。
【解決手段】3D撮像装置101は、2組103a,103bの反射素子105と、撮像素子107と、プロセッサとを有する。撮像素子107は、物体111から発せられ、かつ2組103a,103bの反射素子105のそれぞれから反射された光線を用いて、2つの画像を取得する。プロセッサは、取得した画像のそれぞれにおける複数組のマッチングポイントを特定するように構成される。マッチングポイントの各組は、物体111の対応する単一の要素により発せられた個々の光線により生じたものである。また、プロセッサは、取得した画像のそれぞれにおける複数組のマッチングポイントの各組ごとに、物体111の対応する要素の位置を決定するように構成される。したがって、プロセッサは、物体111の複数の要素の決定された位置を用いて、物体111の3次元画像を生成することができる。
(もっと読む)
移動軌跡図作成装置およびコンピュータプログラム
【課題】 ハイエンドなハードウェアを採用せずとも、人為的条件に左右されにくい、これまでよりも客観的なデータ取得を実現可能な飛翔体軌跡算出の技術を提供する。
【解決手段】 前記複数箇所のそれぞれの撮影手段にて飛翔体を撮影した画像データおよびその画像データを取得した時刻データを記録する画像データ記録手段と、それぞれの画像データおよび時刻データを入力するデータ入力手段と、その時刻データを用いて画像データを同期させるデータ同期手段と、そのデータ同期手段にて同期された画像データから飛翔体が三次元空間を移動する軌跡を含む解析データを算出する3D算出手段と、その3D算出手段が算出した解析データを出力する解析データ出力手段と、を備えた飛翔体軌跡算出装置を提供する。
(もっと読む)
形状測定装置
【課題】測定者の位置や姿勢に関わらず、常に、被測定物体の測定結果を目視で確認することができる形状測定装置を提供する。
【解決手段】被測定物体51の形状を測定して測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、この形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、表示部30を、測定者の頭部に装着され、この測定者の少なくとも一方の眼前に形状情報を投影する投影部35を有するヘッドマウントディスプレイで構成する。
(もっと読む)
3次元位置計測装置および3次元位置計測方法
【課題】3次元位置の計測精度を向上させる。
【解決手段】3次元位置計測装置1は、移動体に設置された複数のカメラ#1〜#nと、カメラ#1〜#nで撮影された映像から任意の対象物の3次元位置を計測する3次元位置計測部1aとを備える。カメラ#1〜#nは、少なくとも1組のカメラ対が共通視野を持つように配置する。また、3次元位置計測部1aは、共通視野の映像に対して複眼ステレオ視制御により周囲の3次元位置を計測して移動体の移動量を推定する。そして、推定した移動量にもとづき、単眼移動ステレオ視制御により対象物の3次元位置を計測する。
(もっと読む)
3次元計測のためのキャリブレーション方法および3次元視覚センサ
【課題】ユーザが定めた計測対象の高さ範囲に適した姿勢でキャリブレーションワークが設置されているかどうかを作業者が容易に判断できるようにする。
【解決手段】キャリブレーション処理の設定画面において、作業者は、高さ計測範囲の下限値および上限値を入力ボックス204,205に入力した後に、ボタン206〜208のいずれかによりキャリブレーションワークの姿勢を選択する。この後、作業者がキャリブレーションプレートを選択した姿勢になるように調整すると、正面視用のカメラにより生成された画像を用いた処理により、このカメラの光軸に直交する平面(基準平面)に対するキャリブレーションワークの表面の傾きを示す角度が算出される。さらに算出された角度に基づき、キャリブレーションワークの姿勢が上記の高さ計測範囲が適合しているか否かが判定され、その判定結果が設定画面上に表示される。
(もっと読む)
形状測定装置
【課題】測定者に被測定物体に対するプローブの位置やライン光の照射角度をアシスト(支援)することができる形状測定装置を提供する。
【解決手段】光学式センサにより被測定物体51の形状を測定して測定情報を出力するプローブ12と、複数のアーム部11a及びプローブ12を回転可能に接続する2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、制御部20は、プローブ12の操作を支援するアシスト表示を表示部30に表示するように構成される。
(もっと読む)
3次元視覚センサにおける計測有効領域の表示方法および3次元視覚センサ
【課題】設定された有効領域の立体形状を周囲との関係とともに簡単に表示できるようにして、3次元視覚センサの利便性を高める。
【解決手段】ステレオカメラのうちの1つをワークWの支持面を正面視する状態に設定して、このカメラにより生成された画像を表示し、計測処理を有効にする領域を矩形枠により範囲指定する。また高さ計測範囲の上限値および下限値を指定する操作を受け付ける。各指定が確定されると、矩形枠Rが設定された画像の各構成画素にz座標として0を設定し、矩形枠に対応する座標に、高さ計測範囲の上限値に基づくz座標と下限値に基づくz座標とを設定する。そして、これらの設定により生成された3次元情報を、ユーザにより設定された視線方向から透視変換し、生成された投影画像をモニタに表示する。
(もっと読む)
3次元視覚センサ
【課題】3次元視覚センサから出力される座標や回転角度がロボットの制御に適合するものになるように、3次元モデルのモデル座標系を変更する。
【解決手段】3次元認識のために作成された3次元モデルおよびその基準の姿勢を示すモデル座標系を透視変換して両者の関係を表す投影画像を生成し、投影画像を含む作業画面を立ち上げる。この画面の作業領域204,205では、投影画像中の原点Oの座標やX,Y,Zの各軸の回転角度RTx,RTy,RTzを表示して、これらの値を変更する操作を受け付ける。変更操作が行われると、投影画像の表示もこれに応じて変化する。また、変更後に画面下のOKボタン208が操作されると、作業領域204,205に表示されている座標や回転角度が確定されて、これらの値に基づきモデル座標系が変更される。3次元モデルの各構成点の座標も、変更後のモデル座標系による座標に変換される。
(もっと読む)
201 - 220 / 867
[ Back to top ]