
Fターム[2F065FF05]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129) | ステレオ法 (867)
Fターム[2F065FF05]に分類される特許
121 - 140 / 867
校正装置、距離計測システム、校正方法および校正プログラム
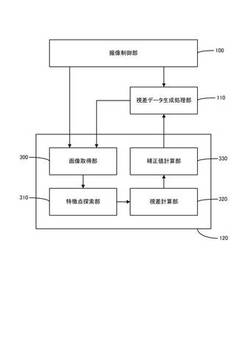
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
測定装置

【課題】ラインセンサにより高さのみ及び高さと変位の両方を高精度に測定することができ、設置作業が容易な測定装置を提供する。
【解決手段】測定装置において、5つ以上の高さ方向の絶対座標が分かるキャリブレーションターゲット2と、前記キャリブレーションターゲット2の画像を撮像し、撮像した画像の画像信号を出力するラインセンサ1と、前記画像信号に基づき画像情報を作成する入力画像作成部と、前記画像情報に基づきターゲット座標を検出するターゲット検出部と、前記ターゲット座標及び予め取得した絶対座標に基づきDLT法の係数を算出する係数算出部と、前記係数に基づき前記ラインセンサ1の姿勢を計算する姿勢計算部と、前記係数に基づき前記ラインセンサ1の焦点距離を計算する焦点距離計算部と、前記係数に基づき前記ラインセンサ1の位置を計算する位置計算部とを備えた。
(もっと読む)
点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム
【課題】異なる視点から得た三次元点群位置データを扱うための処理を効率化する技術を提供する。
【解決手段】第1の視点から得た測定対象物の三次元点群位置データに基づき三次元モデルを形成し、この三次元モデル上において、第2の視点から見た測定対象物の撮影画像との共通部分を指定する。次いで、上記共通部分において、対応点となる特徴点を算出し、対応点を指定する。そして、この指定された対応点に基づいて、第1の視点から得た三次元点群位置データを扱うための座標系に関連付けた第2の視点の三次元位置を算出する。
(もっと読む)
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
(もっと読む)
3次元計測装置及び3次元計測方法
【課題】1回の撮影で視野全体の3次元形状について、その特徴を漏れなく計測することができる3次元計測装置及び3次元計測方法を提供する。
【解決手段】 複数方向の複数の直線及び/又は曲線状のレーザラインにより構成されるレーザパタンをレーザ投影手段から計測対象物に投影し、該レーザパタンが投影された計測対象物を異なる方向から撮影して第1の画像及び第2の画像を取得し、この第1の画像及び前記第2の画像からレーザラインを抽出し、第1の画像のレーザライン点に対応する第2の画像のレーザライン点の対応点候補の3次元座標を夫々求め、該3次元座標を前記レーザ投影手段に設定される投影手段座標系に変換して前記レーザパタンが構成されているレーザパタン平面に射影した夫々の射影点が前記レーザパタン上にあるか否かを判定することにより、対応点を求める。
(もっと読む)
トロリ線検査装置
【課題】トロリ線の連続したエッジ検出を行うことができるトロリ線検査装置を提供する。
【解決手段】トロリ線検査装置において、トロリ線4を照らす照明3と、前記照明3の両脇に1台ずつ設置してトロリ線4を撮影する左カメラ10及び右カメラ11と、前記左カメラ10及び右カメラ11により撮影した画像中の前記トロリ線4の軌跡の下側のエッジを検出して前記トロリ線4の高さと偏位を測定する画像録画及び画像処理部2とを備えた。
(もっと読む)
非接触三次元計測装置及び非接触三次元計測方法
【課題】表面に何ら特徴のない物体についても高速に非接触で三次元形状計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供する。
【解決手段】非接触三次元計測装置は、互いに距離をおいて配置され、被計測物を撮影する第1及び第2のカメラと、被計測物にラインレーザを照射するラインレーザとを備え、第1及び第2の画像20、30で、ラインレーザが撮影された部分を含む矩形領域を第1対象領域26及び第2対象領域36として選択し、ラインレーザが撮影された部分を第1線分データ22及び第2線分データ32として抽出し、第1線分データ22の中の一つの点を特徴点24として選択し、選択した特徴点24に対応するエピポーラ線を第2対象領域36内に計算して、第2線分データ32とエピポーラ線との交点を、特徴点24と対応する対応点34として決定し、被計測物上の該当点の三次元座標を算出する。
(もっと読む)
視点位置算出装置
【課題】 運転者の視点位置の算出に係る信頼性の向上を図る。
【解決手段】本発明は、運転者の視点位置EPを算出する視点位置算出装置1であって、右サイドミラーRの角度と車両の運転席着座中心面Tとに基づいて第1の推定視点位置EPRSを算出する第1推定視点位置算出部12と、左サイドミラーLの角度と車両の運転席着座中心面Tとに基づいて第2の推定視点位置EPLSを算出する第2推定視点位置算出部13と、推定視点位置EPRS,EPRSが一致するか否かを判定する一致条件判定部15と、推定視点位置EPRS,EPRSが一致すると判定された場合、当該推定視点位置を運転者の視点位置EPとして算出する視点位置算出部16とを備え、視点位置算出部16は、各推定視点位置EPRS,EPRSが一致しないと判定された場合、推定視点位置EPRS,EPLSに基づいて視点位置EPを算出する。
(もっと読む)
光学デバイス
【課題】視差ずれを容易に低減可能な画像を撮像できる光学デバイスを提供すること。
【解決手段】光学デバイスは、撮像光に対して第1の光学特性を持つ少なくとも1つの第1レンズを有する第1撮像系と、撮像光に対して第2の光学特性をそれぞれ持ち、互いに異なる光軸を持つ複数の第2レンズを有する第2撮像系とを備え、複数の第2レンズのそれぞれの光軸は、第1レンズの光軸位置の重心を中心として同心円上に位置し、複数の第2レンズの光軸位置の重心が第1レンズの光軸位置の重心に位置する。複数の第2レンズを通じて撮像された複数の画像を重ね合わせた重ね合わせ画像と、第1撮像系で得られた画像とを合成してよい。
(もっと読む)
3次元形状取得装置および3次元形状取得プログラム
【課題】複数の画像から高い精度で奥行き情報を生成する3次元形状取得装置および3次元形状取得プログラムを提供する。
【解決手段】3次元形状取得装置は、基準画像および参照画像からブロック画像を、それぞれ基準ブロック画像および参照ブロック画像として切り出すブロック画像切出手段と、基準ブロック画像における所定の色を基準色として特定し、基準ブロック画像および参照ブロック画像において、基準色に所定の範囲内で類似する色の画素を対象領域として抽出する対象領域抽出手段と、基準ブロック画像における所定の色を対象領域の背景をマスクする置換色として特定し、基準ブロック画像および参照ブロック画像において、対象領域に含まれない画素の色を置換色で置き換える色置換手段と、位相限定相関法により視差を計測する視差計測手段と、視差計測手段が計測した視差から3次元座標位置を生成する3次元座標位置生成手段とを備えることを特徴とする。
(もっと読む)
位置姿勢計測装置、その計測処理方法及びプログラム
【課題】
計測対象物体の位置及び姿勢に関する複数の計測手法の中からいずれかを選択して実施する。
【解決手段】
位置姿勢計測装置は、撮像装置により撮像された計測対象物体の二次元画像を入力し、距離センサにより計測された計測対象物体の距離データを取得し、二次元画像から計測対象物体の画像特徴を検出し、計測対象物体の状態を判定し、当該判定した状態に基づいて、画像特徴と距離データとを用いて計測を行なう第1のモードと、画像特徴と距離データとのうち一方のみを用いて計測を行なう第2のモードとを含むモードの中からいずれかのモードを設定し、当該設定したモードに従って計測対象物体の位置及び姿勢の計測を行なう。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 安定的に検査領域を特定することが可能な画像処理装置及び外観検査方法を提供する。
【解決手段】 濃淡画像を取得する濃淡画像取得手段110と、距離画像を生成する距離画像生成手段130と、濃淡画像と距離画像の一方の画像において、他方の画像上で検査範囲に相当する検査領域を特定するための特定パターンを検出する特定パターン検出手段150と、濃淡画像と距離画像の他方の画像において、特定パターン検出手段により検出された特定パターンの位置及び傾斜角度の少なくとも一方に基づいて、検査領域を特定する検査領域特定手段170と、特定された検査領域から特徴量を算出する特徴量算出手段180と、算出された特徴量に基づいて、ワークの良否を判定する判定手段190と、を備える。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】表面の凹凸、輪郭線近傍の欠陥等の存在を高い精度で検出することができ、良品判定を確実に行うことができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】撮像手段で撮像された、良品に関する複数の第一の多値画像を取得し、取得した第一の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第一の距離画像を生成する。生成した第一の距離画像の画素ごとの濃淡値の、良品判定を行うための分布範囲を算出する。判定対象物に関する第二の多値画像を取得し、取得した第二の多値画像の画素ごとに、撮像手段からの距離を濃淡値に変換した第二の距離画像を生成する。生成した第二の距離画像の画素ごとの濃淡値が対応する分布範囲に含まれているか否かを判断する。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
情報処理方法および装置
【課題】 撮影装置から入力される画像列から指標やセンサの配置情報計測のために必要な画像を自動判定して取得できるようにする。
【解決手段】 複数の視点を移動する撮像装置を用いて、複数の視点ごとに現実空間を撮像した複数の画像を取得し、撮像装置が移動する複数の視点間の移動量を示す評価値を算出し、評価値が予め定められた閾値を超える場合に、移動量が示す移動後の視点で撮像された画像を、補正に用いる画像として決定し、複数の画像のうちの何れを、現実空間に配された位置が既知である指標の位置の補正に用いるかを判定し、補正に用いると判定された画像を用いて、指標の位置を補正する。
(もっと読む)
歯科用補綴物計測加工システム
【課題】非接触で口腔内から患者、歯科医師の負担を軽減させながら直接歯科用補綴物の三次元形状データを取得して、正確な歯科補綴物を製造する。
【解決手段】被写口腔内物を静止的に撮影する画像データ化手段、計測時に被計測物の三次元形状が計測可能な状態で前記画像データ化手段の位置が固定された固定部位を持ち口腔内に挿入可能な大きさを持つ支持体、前記画像データ化手段で得られた撮影情報から、被写口腔内物の三次元形状を得る三次元形状取得手段を有する。
(もっと読む)
画像処理装置、画像処理システム、画像処理方法及びプログラム
【課題】試料中のターゲットの深さ位置を、大容量のメモリを必要とすることなく検出すること。
【解決手段】画像処理装置20は、ステージ11をZ方向へ移動させながら撮像素子30を露光させることで、蛍光マーカMを示す第1の輝点を含む試料SPLの第1の画像を取得し、ステージ11をZ方向へ第1の速度で等速移動させるとともにX方向へ第2の速度で等速移動させながら撮像素子30を露光させることで、上記蛍光マーカMを示す第2の輝点を含む第2の画像を取得し、第1の画像と第2の画像の合成画像内で、第1の輝点と第2の輝点との間の距離Dを算出し、当該距離Dと、上記第1の速度及び第2の速度とを基に、試料SPL中の蛍光マーカMの高さhを算出する。
(もっと読む)
情報処理装置、3次元位置算出方法及びプログラム
【課題】被写体の3次元位置を高速、かつ、安定的に算出する。
【解決手段】少なくとも2つの異なる視点から被写体150を撮像する撮像装置100、110で撮像された被写体150の各画像の色情報に基づいて各画像を複数の領域に分割する領域分割手段と、各画像上に設定された走査線と、領域分割手段で分割された各画像の領域の境界線と、の交点の近傍の領域に基づいて、交点の特徴量を算出する交点特徴量算出手段と、交点特徴量算出手段で算出された交点の特徴量に基づいて各画像の間の対応点を求める対応付け手段3000と、対応付け手段で求められた対応点の視点に対する3次元位置を算出する3次元位置算出手段4000と、を有する。
(もっと読む)
撮像装置ならびにその動作制御方法およびそのプログラム
【課題】3次元画像モデルの構築に必要な画像データを効率よく取得する。
【解決手段】着目画像に現れておりかつ他の画像に現れていないオクルージョン領域が求められる。ディジタル・スチル・カメラ1による撮像によって得られる動画S4中に,上記着目画像のオクルージョン領域と対応する画像領域が現れていると,そのオクルージョン対応領域ROC42が動画S4中に表示される。3次元画像モデルの構築に不足している画像を動画を通して観察(視認)することができる。
(もっと読む)
121 - 140 / 867
[ Back to top ]