
Fターム[2F065FF05]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129) | ステレオ法 (867)
Fターム[2F065FF05]に分類される特許
81 - 100 / 867
マルチカメラのキャリブレーション用全周フィールド
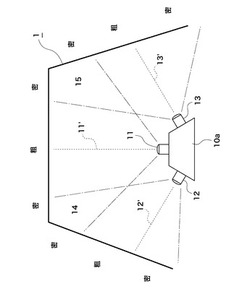
【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
段差エッジ推定装置

【課題】撮像手段により取得されるステレオ画像を利用して、階段等の段差部の平坦面部の先端部のエッジの位置及び方向を精度良く推定することを可能とする装置を提供する。
【解決手段】撮像手段3R,3Lにより撮像した2つの撮像画像(ステレオ画像)を用いて段差部(階段)50の段差エッジ52の位置及び方向を推定する。第1の撮像画像に設定した領域における画像の素値分布と、第2の撮像画像の対応領域における画像を平面パラメータに応じて射影変換してなる画像の画素値分布との間の誤差を表す誤差関数を線形結合して構成される評価関数を算出し、この評価関数の値を最小化するように、段差エッジの位置及び方向を表す段差エッジパラメータを探索的に特定する。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】ディスパリティ画像を生成するためのステレオ画像を撮像するカメラの光軸のずれを補正する。
【解決手段】カメラ21−1,21−2は、異なる視点から、同一の被写体を撮像する。画像ずれ補正部22は、撮像された複数の画像を、ずれ調整部24の調整パラメータ保存部82に保存されている調整パラメータに基づいて変形し、それぞれ補正画像を生成する。マッチング部23は、ステレオマッチング処理によりディスパリティ画像を生成すると共に、複数の補正画像間の視差方向の対応付けが不能な程度を示すエラー量の全画面の積分値をマッチング評価値として算出する。ずれ調整部24は、調整パラメータのうち、視差方向の対応付けに必要とされるパラメータを変化させて、マッチング評価値が最小となるように調整パラメータを更新して、調整パラメータ保存部82に保存する。本発明は、ディスパリティ画像生成装置に適用することができる。
(もっと読む)
測定装置、測定方法、およびプログラム
【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
情報処理装置および方法
【課題】 モデル座標系を基準とした位置姿勢の自由度のうち、特定自由度のパラメータを一意に定める特徴が不足するような物体においても、ロバストかつ高精度な位置姿勢計測を実現する。
【解決手段】 計測対象物体との位置姿勢合わせにより、当該計測対象物体の位置姿勢を取得するための三次元形状モデルを保持するモデル保持手段と、前記計測対象物体の画像を取得する画像取得手段と、前記三次元形状モデルの第一の幾何特徴と前記画像内の第一の幾何特徴とに基づき、第一の座標系において、前記三次元形状モデルの第一の位置姿勢を取得する第一の位置姿勢取得手段と、前記三次元形状モデルの第二の幾何特徴と前記画像内の第二の幾何特徴と前記第一の位置姿勢とに基づき、前記第一の座標系と異なる第二の座標系において、前記三次元形状モデルの第二の位置姿勢を取得する第二の位置姿勢取得手段と、を有することを特徴とする。
(もっと読む)
基板検査装置および基板検査システムならびに基板検査結果の確認用画面の表示方法
【課題】部品およびはんだに対する3次元計測結果に基づく検査の結果や検査対象部位の状態を、ユーザが容易に確認できるような表示を行い、検査結果の確認作業を支援する。
【解決手段】基板上の部品およびはんだに、それぞれ異なる手法の3次元計測を実施し、それぞれの計測により得た3次元情報をはんだ付け部毎および種別毎に読出可能に蓄積する。そして、これらの蓄積情報に基づき、はんだ付け部位毎に部品とはんだとの関係を表す画像を生成し、この画像を含む画面を検査結果の確認用の画面として表示する。好ましい確認用画面では、はんだの3次元情報が表す立体形状を部品のはんだへの接合面の近傍位置で切断した場合に得られるはんだの断面を正面として、このはんだの断面と部品との関係を示す画像(YZ図またはXZ図)が表示される。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
物流システムにおける自動計測装置
【課題】大量の輸送貨物量の発生する現代社会および今後において、物流の自動化、システム化はますます重要になっている。物流システムの効率化、コストダウンにおいて形状、寸法、重量、温度、色、模様などの物性、個別認識情報の一括計測、情報管理が自動化、システム化の要件であるが高速、軽量簡便な計測センサーを実現させ合理化を進める。
【解決手段】形状寸法計測センサーとしてCCDカメラ120〜122を利用し、重量計109その他のセンサー、装置を併用して形状、寸法、物性、個別管理情報の一括計測を可能にし、物流の自動化システム化を計る。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
ステレオカメラ校正器
【課題】この発明は、複数回撮像しなくてもステレオカメラを校正することができ、手前の支柱により奥のマーカが隠れることがなく、個々のマーカを容易に区別することができるステレオカメラ校正器を実現することを目的とする。
【解決手段】この発明は、ステレオカメラの校正に使用されるステレオカメラ校正器において、向かい合わせた2枚の鏡の間に2つ以上の実マーカを配置し、1つの実マーカに対して2枚の鏡に複数の鏡像が映ることを特徴とする。
(もっと読む)
被写体位置計測装置、ディスプレイシステム、および被写体位置計測方法
【課題】被写体位置計測装置および被写体位置計測方法において、撮影人物の頭部等の被写体の一部分の位置を求める際、簡単な方式で上記一部分の位置を安定して求める。
【解決手段】被写体の一部分を球状体と見なして前記一部分の位置を求める。具体的には、装置は、少なくとも2方向からカメラを用いて撮影した被写体の前記一部分の画像のそれぞれにおいて、画像中の前記被写体の輪郭像を抽出する。さらに、前記輪郭像と前記画像中の第1の方向に延びる探索直線とが接する接点位置情報を求めることにより、撮影空間内において、前記カメラから延びて被写体の前記一部分と接する第1仮想直線を前記輪郭像のそれぞれについて求める。さらに、前記撮影空間において、前記第1仮想直線を前記第1の方向に対応する方向に所定の距離それぞれ平行移動した第2仮想直線同士の交点または前記第2仮想直線同士が最接近する点の位置を、前記一部分の中心位置として求める。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】基準位置からのベースライン長を十分に確保できない位置での撮像画像を用いて行うステレオ視による対象物の位置特定の精度を向上させる。
【解決手段】撮像位置特定部1は、位置情報が既知である基準位置の当該位置情報と、当該基準位置で対象物を撮像して得た基準位置画像と、任意の撮像位置で当該対象物を撮像して得た撮像位置画像とに基づいて、当該撮像位置の位置情報の特定を行う。対象物位置特定部2は、既知位置の位置情報と、当該既知位置で当該対象物を撮像して得た既知位置画像と、当該撮像位置の位置情報と、当該撮像位置で該対象物を撮像して得た撮像位置画像とに基づいて、当該対象物の位置情報の特定を行う。なお、既知位置とは、撮像位置特定部1で位置情報が特定された撮像位置からの距離が前述の基準位置よりも大きい地点に位置しており、且つ、位置情報が既知である位置のことである。
(もっと読む)
3次元位置計測システム、3次元位置計測装置および3次元位置計測方法
【課題】対象物の模様の方向に寄らずに安定した距離計測を行う。
【解決手段】カメラと3次元位置計測装置を備える。カメラは、移動体の移動に伴い回転する物体に取り付けられる。3次元位置計測装置は、記憶部と3次元位置計測部を備える。記憶部は、カメラで撮影された画像と、該複数の画像を各々撮影した時刻と同時刻のカメラ回転位置とを対応づけて記憶する。3次元位置計測部は、対象物の模様に対して、複数の画像から、模様の方向とは異なる方向に基線方向を与えるカメラ回転位置の少なくとも2つの画像を選択して、対象物の3次元位置を計測する。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
81 - 100 / 867
[ Back to top ]