
Fターム[2F065FF05]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129) | ステレオ法 (867)
Fターム[2F065FF05]に分類される特許
61 - 80 / 867
空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法
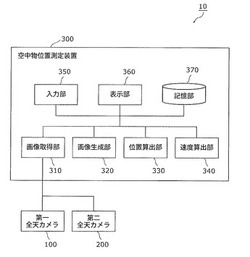
【課題】空中に配置される雲などの測定対象物の位置を容易に正確に測定することができる空中物位置測定装置を提供する。
【解決手段】空中物位置測定装置300であって、第一地点OAにおいて全天カメラを用いて撮像された第一全天画像Z1と、第二地点OBにおいて全天カメラを用いて撮像された第二全天画像Z2とを取得する画像取得部310と、第一全天画像Z1に含まれる測定対象物の画像である第一対象物画像と、第二全天画像Z2に含まれる測定対象物の画像である第二対象物画像とが一致するように、第一全天画像Z1と第二全天画像Z2とを方位を維持しながら重ね合わせて重合画像Z3を生成する画像生成部320と、重合画像Z3内における、第一全天画像Z1の中心位置と第二全天画像Z2の中心位置と測定対象物の位置との位置関係から、空中に配置されている測定対象物の位置を算出する位置算出部330とを備える。
(もっと読む)
矯正プレス

【課題】能率よく、かつ正確に適切な矯正を行うことができる矯正プレスを提供する。
【解決手段】被矯正プレートPを載せるベッド5と、ベッド5の上方から被矯正プレートPを押圧する上型7とを有する矯正プレスであって、被矯正プレートPの平坦度を測定する平坦度計を備えており、平坦度計が、レーザー光投射器10とカメラ20からなり、レーザー光投射器10は、プレスの一側においてレーザー光を被矯正プレートPの上面に照射できる位置に配置されており、カメラ20は、プレスの他側においてレーザー光の照射方向に対し被矯正プレートPの送り方向においてオフセットした位置に配置されている。レーザー光投射器10とカメラ20が1対もしくは2対用いられる矯正プレスは、ベッドとクラウン部をコラムを介して連結した構造であって、前後コラム間のサイドオープニング開口SOは被矯正プレートの幅(W)に対する比がSO/W≧0.3が好ましい。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
3次元計測装置
【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
三次元計測装置および三次元計測方法
【課題】 最適パターン光投影のような強度変調パターン光投影手法による静止物体の三次元画像計測を行う。
【解決手段】 ワークWにパターン光を投影するパターン投影機21と全面照明機22と、パターン光が投影されたワークWを撮像して画像を撮像するカメラ23、24により撮像した画像のデータを処理するデータ処理装置42とから構成され、パターン投影機21によりパターン光を投影して画像を撮影する第1撮像モードと、全面照明機22による全照明反射画像を撮像する第2撮像モードがワークWの種類の特定によって判定される。その撮像結果によって三次元情報が算出されるので、精度の高い三次元情報を得ることができる。
(もっと読む)
情報処理装置、情報処理方法、および位置情報のデータ構造
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
ステレオカメラの配置方法とそのシステム
【課題】
計測対象物が遮蔽物によって遮蔽されている対象物を三次元計測する場合に、輪郭付近に見えている画像すべての点を使えるように、効率よく十分な候補点数を確保し、三次元計測を可能とするカメラ配置方法を提供する。
【解決手段】
本発明におけるカメラ配置方法は、遮蔽物の第一の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第一のエピポーラ面と、第二の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第二のエピポーラ面による交線を算出し、交線上に第二のカメラの投影中心を配置する。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
3次元形状モデル高精度化方法およびプログラム
【課題】被写体を撮影した画像と背景のみを撮影した画像から、被写体3次元モデルを高精度に復元する方法を提供する。
【解決手段】各カメラの被写体シルエット画像から視体積交差法により復元されるVisual Hullの表面に存在するボクセルのオブジェクトらしさに関する尤度を算出し、オブジェクトらしさに関する尤度をもとにVisual Hullの整形を行い、Visual Hullの整形が収束するまで、算出と整形を繰り返し適用する。上記のVisual Hullから獲得される3次元形状モデルのテクスチャ状態を評価し、3次元形状モデルのテクスチャ状態をもとに3次元形状モデルの整形を行い、3次元形状モデルの整形が収束するまで、評価と整形を繰り返し適用する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】ズーム機能を用いた場合であっても、精度よく三次元モデルを作成する。
【解決手段】画像取得部11は、ペア画像を取得する。特徴点対応抽出部12Bは、画像取得部11が取得したペア画像のそれぞれの画像から、特徴点対応の組を抽出する。誤対応除去部12Cは、特徴点対応抽出部12Bによって抽出された特徴点対応の組において、垂直座標の差が所定値以上ある組を誤対応として除去する。第1補正部12Dは、誤対応が除去された後の特徴点対応の組の垂直座標に基づいて、画像取得部11が取得したペア画像を、三次元モデル作成に適した画像に補正する。三次元モデル生成部13は、画像取得部11が取得し、画像補正部12が補正したペア画像から、被写体の三次元モデルを生成する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
移動体検知システム
【課題】移動体に衝突されずに移動体を精度良く検知する移動体検知システムを提供する。
【解決手段】移動体検知システム1は、ステレオ動画像を撮像するステレオカメラ3と、ステレオ動画像が入力されるシステム本体4とを備える。システム本体4は、ステレオ動画像を処理する処理部6を有する。ステレオカメラ3及びシステム本体4は、移動体の移動に支障しないように移動経路外に設置される。ステレオカメラ3は、移動経路上に空間範囲として設定された検知範囲を撮像範囲に含むステレオ動画像を撮像する。処理部6は、ステレオ動画像における各フレームの画像並びにステレオカメラ3の光軸間隔及び焦点距離に基づいて、その移動体の空間位置を算出し、算出した移動体の空間位置が検知範囲内に入ったとき、その移動体を検知したと判定する。これにより、ステレオカメラ3及びシステム本体4は、移動体に衝突されずに移動体を精度良く検知する。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
平坦度検出装置、および平坦度検出方法
【課題】簡単な構成で容易に平坦度を検出可能な平坦度検出装置、および平坦度検出方法を提供する。
【解決手段】平坦度検出装置1は、三次元測定装置2から計測データを取得する計測データ取得手段141と、検査対象計測面上の第一計測点を取得する第一計測点取得手段143と、第一計測点から検査対象計測面の幾何形状式を算出する第一形状算出手段144と、計測データから隣接計測面に属する第二計測点を取得する第二計測点取得手段145と、第二計測点から隣接計測面の幾何形状式を算出する第二形状算出手段146と、検査対象計測面および隣接計測面の交線または交点を算出する外周縁算出手段147と、交線または交点に基づいて補正検査対象計測面の幾何形状式を算出する補正計測面算出手段148と、補正検査対象計測面の幾何形状式に基づいて検査対象面の平坦度を検出する平坦度検出手段149と、を具備した。
(もっと読む)
画像色彩補正装置及び画像色彩補正方法
【課題】光源によらない一定の色に補正できる画像色彩補正装置を提供する。
【解決手段】本発明における画像色彩補正装置1は、測定対象物2と複数のカラーコード付き標識CTを同時に又は別時に異なる複数方向から撮影する撮影部3と、撮影部3により撮影されたカラーコード付き標識CTの撮影画像から、位置検出用パターンP1の位置を求める位置検出部51と、撮影画像から基準色パターンP2を抽出する基準色パターン抽出部52と、撮影画像からカラーコードパターンP3を抽出するカラーコードパターン抽出部53と、基準色パターン抽出部で抽出された基準色パターンのうち、少なくとも光源色補正に用いる色彩を用いて、撮影画像の光源色補正を行う色補正部71とを備える。
(もっと読む)
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置
【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
情報処理方法、眼窩下点の位置推定方法、フランクフルト平面の算出方法および情報処理装置
【課題】被測定者の負担が少なく、かつ簡便な方法によって、眼窩下点などの解剖学的特徴点の位置を推定する方法および装置を提供する。
【解決手段】人(被測定者)の頭部の皮膚表面より、目頭点ENT、目尻点ECT、目頭点ENTの側の眼裂と眉との間の凹部にあたる瞼点PLP、および耳珠上縁点の座標をそれぞれ取得する。取得された目頭点ENT、目尻点ECTおよび瞼点PLPを通る仮想球面SPHの最下点の座標を算出することで眼窩下点ORBの位置を推定する。そして、一または二の眼裂に関する眼窩下点ORBおよび一または二の耳珠上縁点を含む少なくとも3点の座標に基づいてフランクフルト平面を算出する。
(もっと読む)
61 - 80 / 867
[ Back to top ]