
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
4,001 - 4,020 / 5,630
視線誘導装置
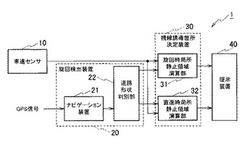
【課題】運転者の運転操作性の向上を図ることが可能な視線誘導装置を提供する。
【解決手段】視線誘導装置1は、視線誘導箇所決定装置30により、運転者の視線を誘導すべき箇所を決定する。提示装置40は、視線誘導箇所決定装置30により決定された箇所で自車両の移動ベクトルが打ち消されるように、該箇所を含む周辺の領域に光を照射する。ここで、運転時には運転者の視線が或る特定の箇所に向くと運転が安定するという傾向がある。また、人間の視界においてオプティカルフローが停止している箇所に視線が向くという傾向がある。このため、上記の如く光を照射することで、運転者にとっては、該箇所のオプティカルフローが停止しているかのように認識されることとなり、運転が安定する特定の箇所に運転者の視線を向けることが可能となる。
(もっと読む)
パターン欠陥検査装置、パターン欠陥検査方法、及びフォトマスクの製造方法

【課題】被検査体の表面の、複雑な形状の単位パターンからなる繰り返しパターンに生じた欠陥を良好に検出できると共に、被検査体を支持するステージを含む装置構成を容易化できること。
【解決手段】単位パターンが規則的に配列されてなる繰り返しパターンを表面に備えたフォトマスク50の、上記繰り返しパターンに発生した欠陥を検査するパターン欠陥検査装置10であって、フォトマスク50の分割検査領域58に所望の入射角で光を照射する光源装置12と、上記フォトマスクを支持する支持面を備えたステージと、上記フォトマスクの繰り返しパターンからのn次回折光を受光する観察装置13と、上記フォトマスクへ異なる方向から光を照射するために、光源装置のコリメータレンズ19をステージの支持面と平行な面内で所定角度回転させる回転装置16とを有するものである。
(もっと読む)
表面検査方法及び表面検査装置
【課題】
簡単な構成で広いダイナミックレンジを有し、検査面自体の散乱光が多い場合でも、高いS/N比で表面検査が可能な表面検査方法及び表面検査装置を提供する。
【解決手段】
検査面4にレーザ光線7を照射、走査して前記検査面の異物等を検出する表面検査方法に於いて、前記レーザ光線の照射部位を所要数の検出領域に分け、各検出領域間で検出光強度が変化する様に受光器で受光し、検査部位について検出光強度の異なる所要数の出力信号を取得し、所要数の出力信号の内、飽和していない最大値を示す出力信号を表面検査信号として選択する。
(もっと読む)
位置計測装置、方法及びプログラム、並びに移動量検出装置、方法及びプログラム
【課題】計算コストをかけることなく、複数の画像から対象物の相対位置を正確に計測する。
【解決手段】撮像部11は、視点1、視点2、視点3で車両前方を撮像して、それぞれの位置において車両前方画像を生成する。縦エッジ線検出部12は、各画像から縦エッジ線を検出し、各縦エッジ線のX座標を表す水平位置uを検出する。対応縦エッジ線決定部13は、縦エッジ線検出部12で検出された視点1〜3における各車両前方画像間で対応する縦エッジ線を決定する。位置関係計算部16は、対応縦エッジ線決定部13で決定された対応する縦エッジ線についての水平位置ui、a、焦点距離fに基づいて、視点3に対する縦エッジ線piの位置を計算する。
(もっと読む)
光学式測定器及び光学式測定方法
【課題】簡単な構成で、側面に凹部を有する測定対象物でも、形状等の測定を可能にすること。
【解決手段】加工機の工具取付部10に対して着脱可能な形状を有するホルダ部11と、収容部34とが一体的に向けられており、収容部34内には反射ミラー37が軸36に回動自在に保持されている。反射ミラー37を回動させない第1位置では光源から出力される測定用光の進行方向を変えずに測定対象物4に照射して測定対象物の測定を行う。側面に凹部を有する測定対象物の側面形状を測定する場合、反射ミラー37を所定角度回動させた第2位置に保持して測定用光の進行方向を変えて測定対象物に照射し、測定対象物で反射した測定用光を光検出素子39によって検出して、測定対象物の測定を行う。
(もっと読む)
表面検査装置
【課題】 照明系と受光系の各凹面反射鏡の配置に応じたノイズ成分のバラツキを小さく抑えることができる表面検査装置を提供する。
【解決手段】 被検物体20の表面に直線偏光L1を照射して表面を照明する照明手段13と、表面から直線偏光の入射面3Aに沿って発生した光L2のうち、直線偏光の振動面に交差する偏光成分を受光する受光手段14とを備え、照明手段および受光手段の各々の光路中には凹面反射鏡35,36が配置され、照明手段の光路と受光手段の光路との少なくとも一方には、入射面に交差する光路(例えば光路6B)が含まれる。
(もっと読む)
位置姿勢計測方法及び装置
【課題】 撮像装置の位置姿勢計測を、簡便な構成により広範囲で行えるようにする。
【解決手段】 予め定めた符号列を、連続する複数の指標で表す様に指標を配置する。指標列を構成する指標は画像処理で識別可能な特徴が異なる少なくとも2種類の指標を含む。そして、撮像画像中に検出された指標を数値情報に変換し、数値情報と予め定めた符号列とから、撮像画像中に検出された指標の同定を行う。そして、予め登録された基準となる指標の座標情報を用いて、同定された指標の座標情報を求める。この座標情報と、別途取得した撮像装置の姿勢情報とを用い、撮像装置の位置姿勢を求める。
(もっと読む)
マーキング装置およびマーキング方法
【課題】 所定の設置物を据え付ける据付面に効率よく据付位置をマーキングすること。
【解決手段】 据付面16に当接して据付面16に印を付けるスタンプ56と、スタンプ56の軸線と一致する光軸を有し、据付面16上にスタンプ56の現在位置を投影するポイントレーザ52と、スタンプ56をポイントレーザ52とともに移動させることによって、据付面16上に投影されるスタンプ56の現在位置を変更するXYアーム44と、据付面16を撮影するカメラ60と、カメラ60の撮影画像における据付位置とスタンプ56の現在位置との差分を求めるとともに、該差分に対応する距離だけXYアーム44によりスタンプ56をポイントレーザ52とともに移動させ、撮影画像における据付位置とスタンプ56の現在位置とが一致した状態でスタンプ56により据付面16上の据付位置Pに印を付ける制御を行う制御装置26を備えた。
(もっと読む)
光電センサ
【課題】組立て時における作業性を向上させることができる光電センサを提供する。
【解決手段】センサヘッドは、ベース部材12及びベース部材12に嵌め合わされるカバー部材とから構成される筐体11を備え、該筐体11内には、投光部21、受光部22、及び筐体11内に配置される部品に接続されると共に筐体11外に引き出されるケーブル4の一端が収容されている。投光部21は、その位置調整のためにベース部材12の側方から操作される調整螺子35を備えている。また、ベース部材12は、筐体11内に配置される全ての部品が配置される平板状のベース板14と、該ベース板14の周縁部の一部に立設されてケーブル4の一端側を保持するケーブル保持壁16と、カバー部材をベース部材12に嵌め合わせる前の状態の時にベース部材12の側方に調整螺子35を露出させる露出部19とを備えている。
(もっと読む)
3次元色形状計測装置
【課題】被計測物の色と3次元形状とを高精度に計測可能な3次元色形状計測装置を提供する。
【解決手段】被計測物を同一の撮像手段により撮像して得られる画像信号に基づいて、被計測物の色と3次元形状とを計測する3次元色形状計測装置であって、第1階調特性に従った第1補正により画像信号を色計測用画像信号に変換すると共に、第2階調特性に従った第2補正により画像信号を形状計測用画像信号に変換する補正手段と、形状計測用画像信号に基づいて、被計測物の3次元形状を復元した3次元モデルと、色計測用画像信号に基づいて復元した被計測物の色とを用いて被計測物の3次元画像を復元する色形状抽出手段とを有することを特徴とする3次元色形状計測装置とした。
(もっと読む)
位相差検出器および位相差検出方法
【課題】位相差測定の精度を高める偏光干渉位相差検出手段を提供すること。
【解決手段】干渉距離測定または干渉変位測定のための検出手段。検出手段は、互いに直交偏光し、偏光感度を有する光線屈折素子に向けて配向される対象物光路出力光線および参照光路出力光線を受け取る。光線屈折素子は、これらの直交偏光光線の一方または両方を屈折させ、これらの光線の間に所望の発散角度を形成する。分離光線は、合成偏光板に入射される。この合成偏光板から射出する光線は、同様に偏光されて干渉する。干渉する分離光線により、干渉縞が形成される。受光素子アレイの干渉縞の空間位相が、干渉計の対象物光線および参照光線の間の位相差とされる。
(もっと読む)
表面検査装置
【課題】 照明系と受光系との各々に反射鏡を配置して高精度な欠陥検査を行うことができる表面検査装置を提供する。
【解決手段】 被検物体20の表面に直線偏光L1を照射して表面を照明する照明手段13と、表面から発生した光のうち、直線偏光の振動面に交差する偏光成分L4を受光する受光手段14とを備える。照明手段および受光手段の各々の光路中には反射鏡35,36が配置される。そして、反射鏡には、基材側より順にバインダー層と反射層と保護層とが積層され、保護層の厚さは、5nm〜20nmであり、反射鏡に対する光の入射角度を15度以下とする。
(もっと読む)
位置姿勢計測方法、位置姿勢計測装置
【課題】 撮像画像を用いて計測対象物の位置や姿勢などを計測する際に、フレーム間の整合性と移動への追従性とを両立した計測技術を提供すること。
【解決手段】 注目フレーム画像中の全指標の座標位置を用いて撮像装置の位置姿勢の第1推定値を求める。注目フレーム画像中の第1指標群と前フレーム画像中の第2指標群とで同じ固有情報を有する指標を共通指標として検出する。第2指標群の固有情報のうち第1指標群の固有情報とは異なる固有情報が存在する場合、前フレーム画像中の共通指標の座標位置を用いて撮像装置の位置姿勢の第2推定値を求める。第1指標群の固有情報のうち第2指標群の固有情報と異なる固有情報が存在する場合、注目フレーム画像中の共通指標の座標位置を用いて撮像装置の位置姿勢の第3推定値を求める。第1乃至3推定値のうち求められたものに基づいて求める補正量を用いて第1の推定値を補正する。
(もっと読む)
反射面の形状測定方法及びシステム
【課題】本発明の目的は、低い装置コストのシステムにより、反射面及び特に、透明対象物に対して信頼性の高い形状測定が可能となり、システムの較正及び形状測定が特に処理しやすくなる選択肢を提案することにある。
【解決手段】本発明は、反射面(14)の形状を測定する方法と対応するシステムであって、反射面(14)で反射される少なくとも1つのパターン(15)と反射面(14)で反射されたパターン(15)を画素毎に視認するための少なくとも1つのカメラ(1)とを有し、カメラ(1)とパターン(15)との位置と向きとが既知であるものに関する。複雑でない装置により信頼性高く反射面の形状を測定するため、画素(8)につき既知のカメラ(1)の視認方向と、反射されたパターン(15)の画素(8)へのマッピングに対応するパターン(15)の位置とを用いて、反射面形状を測定するため表面角度と表面高さとを決定する。
(もっと読む)
地上子位置ずれ計測方法、装置、およびプログラム
【課題】地上子の設置位置からの位置ずれ計測を自動的に行う。
【解決手段】軌陸車が進行して地上子位置に来て、地上子上のレーザ輝線照射エリアに輝線が現れたことをデジタルカメラ12、13からの画像によって検出する。輝線が検出されてから、地上子の、軌陸車の進行方向の長さと軌陸車の移動速度とデジタルカメラ12、13のフレームレートで決まる時間軌陸車が移動した時のデジタルカメラ12、13からの画像を処理して、その輝線と軌道面エッジとの交点および該輝線上の地上子中心である3つの特定点を抽出する。該特定点を用いて地上子中心の軌道間中心に対する相対位置と、地上子の上面の軌道上面からの高さを演算する。
(もっと読む)
顔姿勢検出方法
【課題】複雑な撮像系システムを必要とすることなく、効率的に顔姿勢の方向を検出すること。
【解決手段】この顔姿勢検出方法は、対象者Aの左右の瞳孔及び左右の鼻孔のうちの3つの組み合わせである第1基準部位群における部位間の距離を求める距離導出ステップと、1台のカメラ2によって対象者Aの顔画像を生成し、顔画像に基づいて顔画像上における第1基準部位群の2次元的位置を検出する位置検出ステップと、距離導出ステップにおいて求められた距離と、位置検出ステップにおいて検出された2次元的位置とに基づいて、第1基準部位群を含む平面の法線方向を算出することによって、対象者Aの顔姿勢を導出する姿勢導出ステップとを備える。
(もっと読む)
開口パターンの検査装置
【課題】浅い角度から深い角度の斜光を被検査体の全面域に照射する上で有利な開口パターンの検査装置を提供する。
【解決手段】検査装置用ステージ34にフォトマスク等の被検査体20を載置すると、被検査体20の上面は支持部材14の上方に露出し、被検査体20の下面は支持部材14の下方に露出した状態となる。したがって、光源30によって浅い角度から深い角度まで検査光可動範囲が大きく取れるため、斜光の照射を必要とする透過・反射測定では自由度の高い検査を行う事が可能で、被検査体の平面の外周余白部分と厚み方向の断面部で位置決めが可能なため、平面の外周余白部を除く全面の検査が容易となり、被検査体を正確に位置決め出来ることから位置の再現性も向上される。
(もっと読む)
光学干渉計
【課題】ワークの厚み変化を求めることができる光学干渉計を提供する。
【解決手段】光学干渉計100は、ワークWのおもて面側に配設される第1光学干渉計200と、ワークWのうら面側に配設される第2光学干渉計300とを備える。第1光学干渉計200と第2光学干渉計300とは、光発射部210、310と、ワイヤーグリッド220、320と、干渉縞取得部230、330と、を備える。第1光学干渉計200のワイヤーグリッド220と第2光学干渉計300のワイヤーグリッド320とはワイヤー配列方向が直交関係にある。ワークWが配置されない状態では、第1光学干渉計200のワイヤーグリッド220が第2光学干渉計300からの光を反射して物体光を生成し、第2光学干渉計300のワイヤーグリッド320が第1光学干渉計200からの光を反射して物体光を生成する。
(もっと読む)
形状を測定/認識する方法
本発明は、形状を測定/認識するための方法に関するものであり、2つの異なる方向から測定対象物に向けられている少なくとも2つの電磁振動(1,2)と、照射されている対象物(4)の画像をデジタル形式において撮像するための手段(3)とが用いられる。デジタル形式における上記画像の画像マトリクスを、画素ごとに読み取り、同一の画素について、2つの異なる方向からの照射の強さの値を互いに比較し、画素の高い部分は上記比較の結果として得られる情報から創造される。読み取られた画素の値は、常に次の画素の値が加えられる。  (もっと読む)
(もっと読む)
光学的位置測定ならびに硬質または半可撓性のツールの標的への誘導のためのシステムおよび方法
6つの自由度で身体に対してハンドヘルドツールの位置を測定するシステムには、カメラがツールの近位部とともに移動し、ツールの遠位端を含む視野を有するように、機械的リンク機構を介してツールに取り付けられたカメラが採用される。処理システムは、カメラの画像を処理してツールの少なくとも一部分の位置を決定する。身体の外面に規定される光学的に識別可能な基準参照点を採用することによって、標的を含む平面上へのツールの先端位置の投影が得られて標的位置とともに表示され、それによって、標的へのツールの誘導が容易になる。  (もっと読む)
(もっと読む)
4,001 - 4,020 / 5,630
[ Back to top ]