
Fターム[2F065KK01]の内容
光学的手段による測長装置 (194,290) | 観測方式 (106) | 連続 (33)
Fターム[2F065KK01]に分類される特許
1 - 20 / 33
位置および動作判定方法および入力装置
【課題】被検出体の位置を検出するとともに、被検出体の動作を的確に、かつ、高精度に判定する。
【解決手段】被検出体から発せられた赤外線を受光した赤外線検出部から出力される赤外線検出信号に基づいて、被検出体の位置および動作を判定する位置および動作判定方法であって、赤外線検出部は視野角制限体を有する少なくとも2個の赤外線センサ部を有し、2個の赤外線センサ部からそれぞれ得られる赤外線の強度の差または比をあらわす被検出体の位置信号と、赤外線の強度の各々の差または比を時間の関数とし、時間で微分することにより得た信号と、に基づいて被検出体の動作を判定する。
(もっと読む)
楕円球体の挙動解析方法

【課題】転動する楕円球体の挙動解析を可能にする。
【解決手段】本発明の楕円球体の挙動解析方法は、一対の軌道輪12,13の間で転動する楕円球体11を撮影し、その画像から当該楕円球体11の挙動を解析するものである。この方法は、楕円球体11の長軸S上に配置される第1及び第2のマーカーM1,M2を楕円球体11の表面に設け、楕円球体11の画像中に第1及び第2のマーカーM1,M2が含まれない場合に同画像中に少なくとも2つ含まれる、複数の他のマーカーM3,M4を楕円球体11の表面に設け、第1及び第2のマーカーM1,M2と、複数の他のマーカーM3,M4との相対位置についての位置情報を取得し、楕円球体11の画像中に含まれる少なくとも他の2つのマーカーM3,M4から、前記位置情報を用いて前記第1及び第2のマーカーM1,M2の位置を求めることを特徴とする。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
ガラス基板検査装置及びガラス基板製造方法
【課題】簡易な構成で素材、板厚、端面の状態等を含めたガラス基板等の状態の検査を行うことが可能なガラス基板検査装置及びガラス基板の製造方法を提供することを目的としている。
【解決手段】画像データを解析する解析手段を有し、前記解析手段は、前記画像データの所定領域内における色に基づき前記ガラス基板の素材を判別する判別手段と、前記ガラス基板の板厚を算出する板厚算出手段と、前記ガラス基板の端面に対する加工が行われているか否かを検出する端面状態検出手段と、を有する。
(もっと読む)
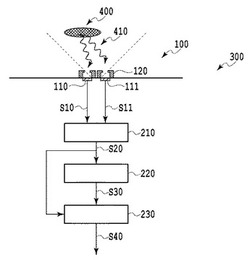
膜厚測定方法及び膜厚測定装置
【課題】構造が未知の膜体に対し、比較的短い計算時間で複数の膜厚を測定することができる方法及び装置を提供する。
【解決手段】本発明に係る膜厚測定方法では、測定対象の膜体に対し、予め作成された既知の単一膜厚値dj(j=1,2,...,m)に対する基準スペクトルSjと、前記膜体の所定の測定領域内におけるn個の照射領域から得られる測定スペクトルVk(k=1,2,...,n)とを、基準ベクトルsj及び測定ベクトルvkに変換し、ベクトル空間{v1,v2,...,vn}と各基準ベクトルsjとの距離Ljを算出する(ステップS1〜S4)。そして、距離Ljが極小となる膜厚値djをそれぞれ膜厚値として出力する(ステップS5及びS6)。この方法によれば、膜体の構造が未知であっても複数の膜厚を測定することができると共に、計算時間が比較的短いため、半導体製造等の用途においてリアルタイムで膜厚を測定することができる。
(もっと読む)
厚さ連続測定装置及び厚さ連続測定方法
【課題】厚さ1mm以下の長尺シートの厚さを連続的に測定する。
【解決手段】装置基体12と、上下方向に揺動自在に前記基体12に取付けられた回転自在の車輪30と、車輪の上方に取付けられ前記車輪の上下揺動に連動して上下揺動するレーザー光反射体24と、前記レーザー光反射体の上方において装置基体12に固定されたレーザー厚さ測定器18とからなる連続走行シートの厚さ連続測定装置。
(もっと読む)
モーショントラッカシステム及びその座標系設定方法
【課題】カメラ装置の撮影領域にカメラ座標系を再設定する際に、カメラ装置の撮影領域にカメラ座標系を短時間で簡単に正確に設定することができるモーショントラッカシステムの提供。
【解決手段】モーショントラッカシステムであって、基準対象物30に取り付けられた少なくとも3個の光学マーカー4を備え、カメラ装置2の撮影領域にカメラ座標系を設定する座標系設定部27と、カメラ座標系における少なくとも3個の光学マーカー4の位置であるキャリブレーション情報を作成してキャリブレーション情報記憶部47に記憶させるキャリブレーション情報記憶制御部31と、基準対象物30に取り付けられた光学マーカー4を撮影することで得られた光学マーカー位置情報と、キャリブレーション情報記憶部47に記憶されたキャリブレーション情報とに基づいて、カメラ装置2の撮影領域にカメラ座標系を再設定する座標系再設定部32とを備える。
(もっと読む)
座標測定機における動的変形による測定誤差の補正
【解決手段】測定機(1)は、測定容積内において測定センサ(3)を移動させるために座標軸線に沿って移動可能な複数の部材(8、10、12)を設けた可動ユニット(7)を備え、レーザセンサ(26)は、可動部材(8)に結び付いて、可動ユニット(7)の動的変形に関連した値を供給し、これらの値は、動的変形により生じた測定機(1)の測定誤差を補正するために処理される。 (もっと読む)
電子部品の端子高さ計測方法
【課題】電子部品の位置が誤ってずれていても、電子部品の高さ計測を可能とする。
【解決手段】電子部品にレーザをパルス点灯させたライン光を走査して、光切断法により端子の高さを計測するための電子部品の端子高さ計測方法において、レーザを連続点灯させたライン光を、端子先端のずれ予想範囲に亘って走査しながら、拡散反射光を撮像し、撮像された画像に基づいて電子部品の端子位置を取得し、その位置情報から端子高さを計測するためのレーザ点灯位置補正を行なう際、端子表面からの拡散反射光が弱い電子部品に対しては、前記レーザの連続点灯によるライン光の、リニアアクチュエータによる走査速度を遅くする。
(もっと読む)
位置検出装置、および画像形成装置
【課題】温度変化が生じても、マークの位置を正確に検出すること。
【解決手段】転写ベルト10上のマーク5を検出する光ピックアップ6a、6bと、光ピックアップ6a、6bを収容するケース1011、1012と、ケース1011、1012を固定位置1021、1022に固定して保持する回路基板1005とを備え、固定位置1021、1022を含む面であって、転写ベルト10の移動方向に垂直な面である固定位置面から、検出位置1031、1032を含む面であって、転写ベルト10の移動方向に垂直な面である検出位置面までの、ケース1011、1012における部位の温度変化による転写ベルト10の移動方向に平行な方向の膨張量の合計である総膨張量と、回路基板1005における固定位置1021、1022の間の部位の温度変化による膨張量とが略同一であること。
(もっと読む)
光ファイバー格子センサを用いた内空変位計測装置及びこれを用いた計測方法
本発明は、橋梁やトンネルの内空変位など、被測定対象物の傾き及び加速度などを精密に測定するための光ファイバー格子(Fiber Bragg Grating;FBG)センサを用いた内空変位計測装置及びこれを用いた計測方法に関するものであって、被測定対象物に設けられる本体と、上記本体の前面に固定されるように設けられた固定体と、上記固定体と所定距離離隔して水平になるように設けられ、ベアリング結合により回転可能に設けられた回転体と、上記固定体の上部外側面に接着され、上記回転体の上部外側面に接着されて緊張状態を維持するように水平に設けられ、その両端部に光端子が各々設けられた光ファイバーと、上記固定体と回転体との間の光ファイバー上に設けられる光ファイバー格子センサと、上記回転体の下部と所定長さの支持台により連結されて垂直状態に設けられた錘とから構成された計測装置を基準値に設定した後、被測定対象物に設け、地盤の変動に従う変位量を計算することによって、角度及び重力加速度の変位値を計測することができる。  (もっと読む)
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】昼間太陽光の下においてもトロリ線の摩耗部分の幅を測定する装置を提供するにある。
【解決手段】ラインセンサ1を用いてラインセンサ画像を作成して入力画像として保存する手段10と、前記ラインセンサ画像全体に対して2値化処理を行う手段20と、2値化処理された前記ラインセンサ画像に対して外部から入力されてくるトロリ線高さパラメータと実際のトロリ線の太さのパラメータを用いて画面上のトロリ線の太さを計算し、それ以上大きさの白の領域を黒の領域に反転する反転処理を行う手段30と、2値化処理及び反転処理された前記ラインセンサ画像に対してノイズ除去処理を行う手段40と、2値化処理、反転処理及びノイズ除去処理された前記ラインセンサ画像における白領域をトロリ線摩耗部として、該トロリ線摩耗部のエッジを検出する手段50と、検出された前記エッジから前記トロリ線摩耗部の幅の計算を行う手段60からなることを特徴とする。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】トロリ線からの反射光にムラができず、均一な照明条件を作ることを目的とする。
【解決手段】ラインセンサ11を用いてラインセンサ画像を作成するラインセンサ画像作成手段50と、ラインセンサ画像に対して二値化処理を行うことにより二値化ラインセンサ画像とする二値化処理手段53と、前記二値化ラインセンサ画像のノイズを除去するノイズ除去処理手段54と、ノイズ除去後の前記二値化ラインセンサ画像からトロリ線摩耗部のエッジを検出しエッジデータとするエッジ検出処理手段55と、前記エッジデータとトロリ線高さデータに基づいてトロリ線摩耗部幅の計算を行うトロリ線摩耗部幅計算処理手段56とを有する画像処理によるトロリ線摩耗測定装置において、前記ラインセンサ1は、検査車両4の屋根上にトロリ線3を見上げるよう鉛直上向きに設置され、且つ、前記トロリ線3を照明する照明手段は前記検査車両4上で前記検査車両の進行方向に対して垂直をなす方向に複数の点光源2を直線状に設置してなることを特徴とする。
(もっと読む)
流水領域検出システム、流水領域検出方法、及びプログラム
【課題】水中にいかなる物体をも設置することなく、河川等を被写体とする映像信号のみから流水領域を検出できるようにする。
【解決手段】固定カメラCMを用いて撮影された流水領域及び非流水領域が含まれる映像を複数フレームにわたって加算するフレーム加算部2と、加算された映像のエッジ成分を強調させる空間フィルタ処理部3と、空間フィルタ処理部3により生成された映像における各画素をエッジ画素か否かに分類する二値化処理部4と、得られる二値画像をもとに流水領域及び非流水領域を判別する領域分割部5Aとを備え、水中にいかなる物体をも設置することなく、河川等を被写体とする映像信号のみから流水領域を検出できるようにする。
(もっと読む)
顔部位検出方法及びその装置
【課題】被検出者の顔の幅方向両側の輪郭線から耳の存在の有無を確実に求めて、耳の検出精度を向上できる顔部位検出方法及びその装置を提供すること。
【解決手段】被検出者の顔を前方から撮像して、この撮像された画像から被検出者の顔の輪郭を検出した後、この顔の輪郭が幅方向に不連続となる箇所を検出し、この検出された不連続点に囲まれた領域を耳領域とする。
(もっと読む)
ステレオ画像処理装置
【課題】誤対応(アウトライア)にロバストで、かつ演算負荷が軽い形で自車の運動量を推定することの出来るステレオ画像処理装置の提供
【解決手段】捕捉時刻の異なる2枚の画像中で共通に表示されていると判断される特徴点を多数抽出し、それらを互いに対応付けて、両画像間の対応点と推定する処理を実行する手段、車両の仮の自車運動量を演算して、仮の基礎行列を演算推定する手段、仮の基礎行列から、対応点除去部により多数抽出された各対応点について、エピポール誤差を演算することにより、多数抽出された対応点から、大きな誤差値を有する対応点を誤対応点として除去する手段、誤対応点が除去された多数抽出された対応点に基づいて、基礎行列を推定し、当該推定された基礎行列から、前記車両の自車運動量を演算推定する手段、推定された車両の自車運動量及び誤対応点が除去された対応点を用いて、特徴点の3次元座標を推定する3次元座標推定手段から構成される。
(もっと読む)
画像処理装置及びその方法
【課題】撮影装置の揺動の処理や消失・再現する特徴点の処理が必要とされている場合においても、動画像又は順次少しずつ変化する撮影画像から、その撮影装置の撮影位置、姿勢又は対象物の座標を精度良く計測できる技術を提供する。
【解決手段】本発明による画像処理装置100は、相対的に移動する対象物について少しずつ変化する撮影画像を順次取得する撮影画像取得部2と、撮影画像取得部2で得られた撮影画像から特徴点を抽出する特徴抽出部3と、前記特徴点が抽出された撮影画像以前又は以降に取得された複数の撮影画像について前記特徴点に対応する候補対応点を捜索し、前記特徴点の追跡を行う特徴点追跡部4と、前記候補対応点について、追跡結果から対応点を確定し、確定された対応点を用いて撮影位置又は対象物の座標を演算する処理部5とを備える。
(もっと読む)
ベルトの膜厚測定装置、及びベルトの膜厚測定方法
【課題】精度良く、且つベルトの膜厚を連続して測定可能なベルトの膜厚測定装置及びベルトの膜厚測定方法を提供すること。
【解決手段】上レーザ変位計14Aにより距離RA及び距離SAを測定する。下レーザ変位計14Bにより距離RB及び距離SBを測定する。距離RAと距離SAとの差分、即ち距離TAを求める。また、距離RBと距離SBとの差分、即ち距離TBを求める。そして、上透明基準ガラス板16Aのベルト対向面と下透明基準ガラス板16Bの凹部22底部との距離Pから、距離TA及び距離TBの和を差し引くことで、ベルト10の膜厚を演算する。
(もっと読む)
回転駆動装置
【課題】 回転体の回転速度の検出のための構成を簡略化する。
【解決手段】 回転体1の回転中心にモータ2の回転軸3が、回転軸3には回転体1とモータ2との間に円盤状のエンコーダ4がそれぞれ設けられており、モータ2の回転によって回転体1とエンコーダ4とを同時に同速度で回転させる。エンコーダ4上には、複数のスケール5が回転軸3を中心に環状に配設されており、検出部6がエンコーダ4の回転時にエンコーダ4上の各スケール5に対して光源から光を照射し、各スケール5を透過した透過光をセンサによって検出したときの検出信号を制御部7へ出力し、制御部7は、回転体1の回転中は検出部6からの検出信号に基づいてエンコーダ4の取り付け偏心量を検出し、その検出した取り付け偏心量を補正することによって回転体1を所定の回転速度で回転させ、モータ2の回転数を調整して回転体1の回転速度を制御する。
(もっと読む)
物体検出ユニット、物体検出装置、横断路の移動物体検知装置及びプログラム
【課題】表面が滑らかで光沢のある黒い物体などレーザ光線の反射率が低い物体の位置、形状を正確に検出する物体検出ユニットを提供する。
【解決手段】物体検出部20a〜20dが読み出された固定物体の位置データ中から距離の測定値を示す信号のあるレーザ光線の照射角度ごとに、そのレーザ光線の照射角度に対応する監視領域内に存在する物体の位置データ中から受光なしを示す信号のあるレーザ光線の照射角度を抽出する(S125)。そして、抽出されたレーザ光線の照射角度がある場合には、物体検出部20a〜20dがそのレーザ光線の照射角度の位置には、レーザ光線を反射しない移動物体が存在すると判断する。一方、抽出されたレーザ光線の照射角度がない場合には、物体検出部20a〜20dが監視領域内にレーザ光線を反射しない移動物体が存在しない、と判断する(S130)。
(もっと読む)
1 - 20 / 33
[ Back to top ]