
Fターム[2F068AA40]の内容
音響的手段による測長装置 (5,715) | 測定内容 (696) | 輪郭 (29) | 3次元の (8)
Fターム[2F068AA40]に分類される特許
1 - 8 / 8
無人の水中航走体および無人の水中航走体を運転するための方法
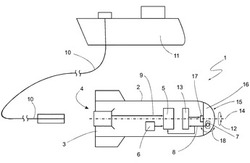
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
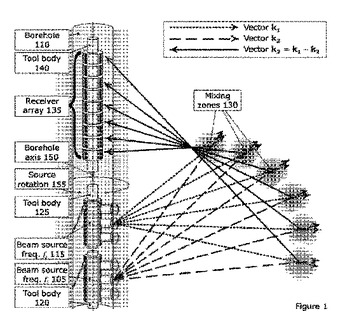
ボアホールから離れた領域における非線形の音響特性の3次元画像を生成するシステム及び方法
本開示の一部の態様において、搬送検層装置を用いてボアホールから離れた領域における非線形特性の3次元画像及び縦波速度対横波速度比を生成する方法が開示される。一部の態様において、前記方法は、前記ボアホール内に第1音響源を配置して第1周波数の弾性エネルギーの可動ビームを生成する工程と、前記ボアホール内に第2音響源を配置して第2周波数の弾性エネルギーの可動ビームを生成する工程と、前記第1周波数の前記可動ビーム及び前記第2周波数の前記可動ビームが前記ボアホールから離れた位置においてインターセプトする工程と、前記ボアホールにおいてセンサのアレイによって、前記第1周波数と前記第2周波数との差に等しい周波数を有するとともに非線形の混合ゾーンにおける3つの波の非共線混合処理によって生成された前記ボアホールの方向への伝播方向を有する第3の弾性波を受信する受信工程と、前記第1音響源及び前記第2音響源の配置、前記第3の波の方向、及び音響的に非線形な媒体における非共線混合を支配する選択規則に基づいて前記3つの波の混合ゾーンの位置を特定する特定工程と、前記生成工程、前記受信工程、及び前記特定工程を複数の方位角、傾斜、及び前記ボアホール内の長手方向位置において繰り返すことによって記録されるデータを用いて前記非線形特性の3次元画像を作成する工程とを備える。この方法は、前記ボアホール周囲の同一の領域の圧縮音響速度対せん断音響速度比の3次元画像を生成するために追加的に用いられる。
 (もっと読む)
(もっと読む)
スタンドオフおよび掘削孔形状の測定

屈折した超音波がツールスタンドオフを計算するために使用される。超音波送信機は、屈折波に対して臨界入射角で掘削孔の壁に向かって(の中に)波を送る。屈折波は掘削孔の壁に沿って横切り、臨界角で掘削孔中にエネルギを連続的に放射する。屈折波は受信機により検出され、送信機から受信機までの屈折した音波の移動時間が測定され、そしてスタンドオフの計算に使用される。多くの方向で(例えばツールを回転させて)測定を繰り返すことにより、1またはそれ以上のキャピラー測定が行える。キャピラー測定は、掘削孔の2次元形状を表すために組み合わせても良い。異なった方向と深さにおける測定は、掘削孔の3次元形状を表す。送信機・受信機ペアのアレイは、方向を変える必要を無くすために使用される。 (もっと読む)
三次元画像生成装置及び三次元画像生成方法
【課題】安全で測定精度の良い三次元画像を生成する三次元画像生成装置を提供する。
【解決手段】この三次元画像生成装置110は、被検査対象物6に超音波を送信する送信部と被検査対象物6から反射した超音波を受信する受信部とを備えたプローブ1と、プローブ1の三次元位置情報及び姿勢情報を生成するセンサ2と、所定のエリアに磁界ベクトルを形成するトランスミッタ4と、三次元位置情報及び姿勢情報に基づいてプローブ1から取得された反射画像の三次元形状を演算するPC(演算部)12と、演算結果を三次元画像として表示するモニタ(表示部)14と、センサ2からの座標をリアルタイムに演算する位置検出回路10と、プローブ1から得られた反射画像データを処理するイメージプロセッサ11と、を備えて構成されている。
(もっと読む)
画像再構成装置
【課題】記憶容量を極端に増加することなく、高解像度でのプローブ走査回数を少なくし、画像処理の時間を短くした画像再構成装置を提供すること。
【解決手段】広志向性プローブと、前記プローブの出力信号を処理して3次元画像情報を作る画像処理方法を組み込んだ演算装置とからなる画像再構成装置であって、前記画像処理方法は、間引きサンプリングにより得られた時系列の出力信号を、間引きサンプリングに対応した時系列データのフーリエ変換した信号と、間引きサンプリングに対応した時系列データの指向性関数信号により間引きサンプリングに対応した反射関数のフーリエ変換した信号を求め、前記反射関数のフーリエ変換した信号を逆フーリエ変換して実空間での反射関数の分布を求める手順を有することを特徴とする画像再構成装置。
(もっと読む)
立体視装置およびそれを備えた立体画像表示システム
【課題】 超小型、かつ低消費電力、かつリアルタイム撮像が可能な立体視装置およびそれを備えた立体画像表示システムを提供する。
【解決手段】 この立体視装置では、超音波発生器4は、LFSR11からのPN符号に従って振幅変調された超音波を生成して対象物6に照射する。イメージセンサ14は、複数行複数列に配置され、各々が対象物6からの反射波を受け、受けた反射波を電気信号に変換する複数の単位キャパシタを含む。相関器15は、複数の単位キャパシタの各々によって生成された電気信号の位相とLFSR12からのPN符号の位相とを比較し、比較結果に応じて相関値DATAを出力する。これにより、対象物の三次元的な立体画像をリアルタイムに得ることができる。また、立体視装置内部に記憶回路やプロセッサが不要であるため、超小型で低消費電力の立体視装置が実現できる。
(もっと読む)
埋没物体の非破壊形状診断方法およびその装置
【課題】 転石などの埋没物体の根入れ深さや体積を非破壊で正確に、かつ容易に診断する方法および装置を提供すること。
【解決手段】 30kHz以上の周波数成分を含むチャープ信号を圧電セラミック素子等からなる発信部20に印加し、この発信部20から埋没物体12の内部に弾性波の入力波23を入力し、その反射波24が圧電セラミック素子等からなる受信部21に到達するまでの時間Δtを測定し、入力位置から反射位置までの距離Lを、式 L=Δt×V/2 V:埋没物体12の波動伝搬速度 にしたがって求める。また、反射波到達時間Δtを、反射波24の自己相関解析によってより正確に求める。数箇所で探査することで埋没物体の体積を推定する。
(もっと読む)
超音波干渉縞を用いた形状解析方法及び装置
【課題】本発明は、超音波を用いて物体の表面や背面、あるいは、物体内部の空隙などの形状を表示させる方法を提供する。
【解決手段】本発明の形状解析方法では、超音波探触子から被検体に超音波を照射し、被検体からの反射波に基づいて音響画像を表示するとき、被検体の形状の等高線を表す超音波干渉縞を併せて表示する。そのため、被検体の形状を立体的に把握することができ、被検体形状の解析を的確に実施できる。この形状解析方法では、超音波が直接当たる被検体の表面だけでなく、被検体の背面形状や、被検体内部の空隙形状、異相間の界面形状などを非破壊で解析することができる。この方法では、参照波を形成すること無く、超音波干渉縞を得ているため、複雑な装置や複雑な調整手順を必要としない。
(もっと読む)
1 - 8 / 8
[ Back to top ]