
Fターム[2F069AA04]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 位置;座標 (1,122) | 3次元 (390)
Fターム[2F069AA04]に分類される特許
381 - 390 / 390
ワークピースの座標を確定するための方法
本発明は、ワークピース(9)に対して不動に位置決めされている第一座標系を固定すること、 ワークピース(9)の第一座標を、第一座標測定装置(3)を使用することにより測定すること、 ワークピース(9)の第二座標を、第二座標測定装置(5)を使用することにより測定すること、そして 第一座標と第二座標から、共通の座標組を、ワークピース(9)に不動に位置決めされた座標系に対する第一座標系においてあるいは第二座標系において作ることを特徴とするワークピース(9)の座標を確定するための方法に関する。特に多数のワークピース(9)の座標はワークピース(9)の製造工程および/または加工工程の最中および/または後に確定することができる。さらに本発明はワークピース(9)が両座標測定装置(3,5)を用いた測定の間に位置および/または姿勢が変化する場合にも関する。 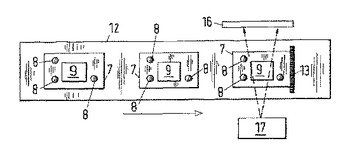 (もっと読む)
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
座標位置決定装置の較正のための方法
座標位置決定装置によって対象物の測定を行う方法にあって、前記座標測定機械の作業容積内に前記対象物を配置するステップと、ワークピース接触プローブにより前記対象物を測定するステップであって、複数のプローブ力で収集された測定データを作成するステップと、前記対象物の表面の少なくとも1つの位置について、前記測定の誤差データを前記プローブ力に関連付ける関数またはルックアップテーブルを決定するステップと、前記対象物の表面の前記少なくとも1つの位置について前記関数またはルックアップテーブルを使用し、前記プローブ力がゼロであるときに対応した測定データを決定するステップと、前記プローブ力がゼロであるときに対応した測定データを前記対象物の測定値として出力するステップと、を具える。
 (もっと読む)
(もっと読む)
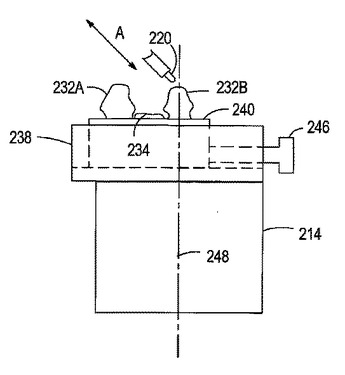
走査するための方法および装置
開示されるのは、物品を走査するためのスキャナであり、該スキャナは、走査デバイス(18)および回転可能なサンプル取付部(14、420)を有し、走査デバイスおよび取付部が取付部の回転軸(48)に沿って相対的に変位可能である、走査装置(10)と、サンプル取付部に取り付けられたレセプタクル(40、140、240、400)であって、物品(30)を確実に収容することができるレセプタクルと、レセプタクルを直線的に変位させるためのアクチュエータ(146、246)であって、アクチュエータの作動が、レセプタクルと、レセプタクルに取り付けられたいずれの物品をも、サンプル取付部に対し変位させる、アクチュエータと、を備える。物品は細長いと良く、アクチュエータによる変位は、細長い物品の長軸によって定められた軸線に沿っている。同じく開示されるのは、走査方法である。
 (もっと読む)
(もっと読む)
関節プローブヘッドを持つ座標測定機の誤差補償方法
面検出デバイスを有した関節プローブヘッドを備えた座標位置決め装置を用いて行われる測定の誤差補償方法を提供する。前記面検出デバイスは測定の間前記関節プローブヘッドの少なくとも1つの軸回りに回転する。そして、前記補償は、前記装置の全体または部分の剛性を決定する工程と、特定の時点に前記関節プローブヘッドによって加えられる前記負荷に関連した1つまたはそれ以上の要因を決定する工程と、前記負荷によって生じる前記面検出デバイスにおける測定誤差を前記工程(a)および(b)を用いて決定する工程と、有する。
 (もっと読む)
(もっと読む)
リソグラフィ装置及びデバイス製造方法
リソグラフィ投影装置が開示される。この装置は、パターン形成装置を照射するのに使用される放射ビームを提供するための照射系と、パターン形成装置を支持する第1の支持台とを備える。パターン形成装置は、放射ビームをパターン形成することができる。この装置はまた、基板を支持する第2の支持台と、パターン形成した放射ビームを、基板の目標部分上に投影するための投影系と、投影系の速度と加速度の少なくとも一方に基づいて投影系の位置と向きの少なくとも一方を制御する、投影系の位置決めモジュールとを備える。  (もっと読む)
(もっと読む)
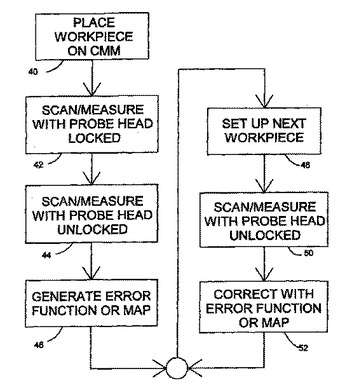
座標測定機における誤差補正方法
関節プローブヘッドを較正する方法であって、関節プローブヘッドに取り付けられたワークピース検出プローブによって、既知の寸法を有する疑似品を測定するステップを備え、前記関節プローブヘッドがアンロックされている方法。疑似品の測定された寸法と既知の寸法との差に応じて、誤差関数又はマップが発生される。アンロックされた関節プローブヘッドによって以降のワークピースが測定され、対応する修正が適用される。疑似品の真の寸法は、関節プローブヘッドに取り付けられたプローブによって疑似品を測定することにより決定されてもよく、この場合、関節プローブヘッドの軸はロックされる。機械式ロック手段が、関節プローブヘッドの軸をロックするために設けられる。
 (もっと読む)
(もっと読む)
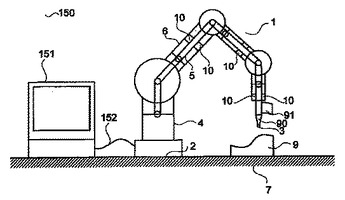
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
タッチセンサ
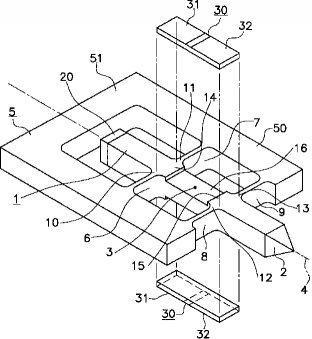
【課題】 スタイラスの軸方向に対して有害な曲げ振動の発生を防止することで、微細な表面形状の測定を可能にするタッチセンサを提供する。
【解決手段】 スタイラス1は、その軸方向に略対称の構造である。スタイラス1とスタイラスホルダ5とを連結する支持部材6〜9のスタイラス側の支持部10〜13は、スタイラスの重心3に対してスタイラスの軸方向に対称となる複数個所で、更に、その各個所においてスタイラスの軸4に対称な複数個所である。スタイラスの軸方向同一個所における各組の支持部材の重心が略前記軸上にある。加振手段31および検出手段32の少なくとも一方は、重心3から等距離となる少なくともスタイラス上の2個所に橋渡しされるように設けられている。
(もっと読む)
重力ベクトル方向算定補助手段を有する位置検出装置

少なくとも一つの三次元座標系(5;24)内の本体(36)の位置と方向を検出する装置であり、この装置は、A)位置検出センサー(1);およびB)少なくとも一つの座標系(5;24;26)内で本体(36)の位置と方向を算定するために位置検出センサー(1)へ接続したコンピュータ(8)を含み、C)前記装置は重力ベクトル(19)の方向を算定する補助手段(25)を含む。重力または地球の磁場に関連した影響から生ずる欠陥に関して磁気光学X線写真(35)を修正する方法であり、この方法は以下の段階:a)重力ベクトル(19)の方向を検出する段階;b)X線器械(28)の位置と方向を算定する段階;c)重力により引き起こされたX線器械(28)の機械的変形によるX線写真(35)のゆがみを算定する段階;d)地球の局所的磁場により引き起こされたX線写真(35)の欠陥を算定する段階;e)受像機(29)に生成するX線写真(35)の光学的変形を算定する段階;およびf)コンピュータ(8)を用いて、段階c)、d)およびe)で算定された欠陥に関してデジタル化したX線写真を修正する段階を含む。 (もっと読む)
381 - 390 / 390
[ Back to top ]