
Fターム[2F069AA32]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547) | 曲線に沿った長さ (21)
Fターム[2F069AA32]の下位に属するFターム
測定対象物の周長 (14)
Fターム[2F069AA32]に分類される特許
1 - 7 / 7
鋼線長さの評価方法、鋼線の巻取方法および巻取製品
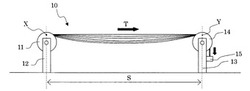
【課題】複数本にて引き揃えられた鋼線の束を構成する各鋼線の長さを、簡易にかつ正確に評価することができる鋼線長さの評価方法を提供する。また、この評価方法を用いることで、複数本の鋼線を誤差の少ないほぼ同一の長さで巻き取ることができる鋼線の巻取方法、および、これにより得られる巻取製品を提供する。
【解決手段】複数本にて引き揃えられた鋼線の束10を構成する各鋼線1の長さを評価する方法である。鋼線束10を、水平方向距離Sの間隔を有しかつ同じ高さに位置する2つの支持点X−Y間に掛け渡した状態で、鋼線束の一端を固定して他端に一定の張力を掛けたときの各鋼線のなす曲線の最低高さと支持点の高さとの差dを計測して、得られた計測値dに基づき、2つの支持点間における各鋼線の長さLを算出する。
(もっと読む)
計測装置、及び計測方法

【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
電線の弛度測定方法および装置
【課題】大がかりな設備を要することなく容易に電線の弛度を測定できる電線の弛度測定方法および装置を提供すること。
【解決手段】第1、2の支持点i,jの第1および第2のカテナリー角α,βを測定する第1、第2の角度検出手段11,12と、各データを入力する入力手段13と、カテナリー曲線を表す式を積分して求めた計算式に、α,βの測定値および電線の長さLの推定値等の各データを代入し演算して長さLの計算値を求める第1の演算手段14と、計算値と推定値を比較して、両値が予め設定された精度で一致する否かを判定する判定手段14と、一致すれば、推定値を長さLの測定値と決定する決定手段14と、α,β、長さLの測定値に基づいて電線の弛度を演算する第2の演算手段14とを備え、判定手段14で一致しなければ一致するまで、計算値を推定値として計算式に代入して再度第1の演算手段14による演算と判定手段14による判定を繰り返す。
(もっと読む)
タイヤ磨耗警告装置
【課題】 タイヤ摩耗の警告が自動的にユーザに与えられるようにしたタイヤ摩耗警告装置を提供すること。
【解決手段】 摩耗後タイヤ情報演算部71は、GPS2で検出した車輌の位置から一定期間毎の当該車輌の走行距離を求め、この走行距離と、車輪回転数センサ3で一定期間毎に検出した車輪の回転数とに基づいて、摩耗後のタイヤの外周CN と摩耗後のタイヤの外径DN を演算し、摩耗前タイヤ情報演算部72は、摩耗前タイヤ情報入力部5から入力されたデータに基づいて、摩耗前のタイヤの外周CI と摩耗前のタイヤの外径DI を演算する。タイヤ摩耗量演算部73は、磨耗後タイヤの外周CN と外径DN を、磨耗前タイヤ情報演算部72から入力されている磨耗前タイヤの外周CI と外径DI と比較し、これらの差を摩耗量ΔC及び摩耗量ΔDとして算出する。そして危険磨耗状態判定部75は、摩耗量ΔC、ΔDが、危険摩耗量判定値設定部74から入力されている閾値ΔCth、ΔDth を越えたとき、アラーム信号Hを発生し、音声出力部4と表示用ディスプレイ6を働かせ、運転者に警告をする。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 長距離の計測においても精度の高い線形計測が可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 パイプラインの始点及び終点におけるピグ本体の姿勢を予め取得しておき、始点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して始点から終点までの順方向の姿勢データを求めるとともに、終点におけるピグ本体の姿勢に対して、ピグ本体の走行によって得られた姿勢変化角を順次累積して終点から始点までの逆方向の姿勢データを求め、順方向の姿勢データと逆方向の姿勢データとを用いて姿勢誤差を低減した姿勢データを再計算し、再計算後の姿勢データを用いてパイプラインの線形形状を求める。
(もっと読む)
パイプラインの形状計測評価方法及びその装置
【課題】 重力鉛直偏差による重力誤差を極力抑え、長距離の測定でも十分な精度を確保することの可能なパイプラインの形状計測評価方法及びその装置を提供する。
【解決手段】 ピグ本体を静止状態として静止状態における加速度計の加速度データを取得し、その加速度データから重力方向を求め、この重力方向と地上の現在地点における緯度とから、パイプラインの線形形状の計測を開始する際に必要なピグ本体の初期姿勢角を算出し、この初期姿勢角を、加速度データから求められる重力方向と地球を密度一様な楕円体と仮定した場合の重力方向との偏差に基づく補正角によって補正し、その補正後の初期姿勢角を用いてパイプラインの線形形状を求める。
(もっと読む)
路面断面プロファイルの測定方法
【課題】 測定路面の両端の一定長さが平坦でなくても測定路面の全範囲において簡易かつ精度良くプロファイル測定が可能な路面断面プロファイルの測定方法を提供する。
【解決手段】 測定ブロック10の長さの異なる第1及び第2連結棒14,15が真直状態での第1ローラ11及び第3ローラ13の中心間寸法を基準距離として、基準距離を複数点に分割した複数の計測位置を決める。測定ブロックが路面の縦方向に進行し、第3ローラが計測位置を順次移動する毎に、各計測位置にて第1及び第2連結棒のなす連結角をロータリエンコーダにより検出する。連結角検出値から路面のプロファイルを推定する。さらに、路面のプロファイルを評価する評価関数を設定し、この評価関数を共役勾配法等の演算手法を用いて最小化することにより、路面全体の精密な断面プロファイルを得ることができる。
(もっと読む)
1 - 7 / 7
[ Back to top ]