
Fターム[2F077DD08]の内容
感知要素の出力の伝達及び変換 (32,270) | 機械的手段による変換(伝達) (322) | 歯車装置を用いるもの (221) | 遊星歯車 (37)
Fターム[2F077DD08]に分類される特許
1 - 20 / 37
回転角検出装置、及びトルクセンサ
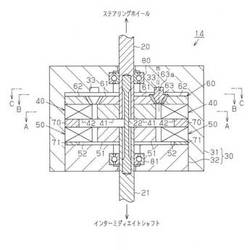
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
キャンバ角調整装置

【課題】安価でありながら、信頼性のあるキャンバ角調整装置を提供する。
【解決手段】駆動部材2と連結されるクランク軸4a1,4b2及びクランク軸に対して偏心したクランクピンを有するクランク部4と、一端の第1連結部でクランクピンに連結される連結部材51と、車体に連結されると共にキャンバ軸を形成するキャンバ部材と、車輪を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材51の他端に第2連結部で連結される回動部材と、クランク部4の回転角度を検出するインクリメント式のロータリーエンコーダ6と、モータに流れる電流を検出する電流検出部材60と、電流検出部材60の検出値に応じてロータリーエンコーダ6の原点を補正する制御部と、を備えることを特徴とする。
(もっと読む)
回転角センサ
【課題】 特に、小歯車に噛み合う第1の従動歯車が大歯車に干渉するのを効果的に抑制できる回転角センサを提供することを目的としている。
【解決手段】 本実施形態の回転角センサ1は、外周部に第1の歯部を有する小歯車25と、小歯車と同軸上に設けられ、小歯車25よりも外方に突出した位置の外周部に第2の歯部を有し第2の歯部と第1の歯部との間に突出面24bを有する大歯車24とを備えるロータ6と、小歯車25の第1の歯部と噛み合う第1の従動歯車7と、大歯車24の第2の歯部と噛み合いロータ6が所定の角度だけ回転したとき第1の従動歯車7の回転数と異なる回転数の第2の従動歯車8と、第1の従動歯車及び第2の従動歯車の回転角に応じて前記ロータの回転角を検出可能な回転検出部と、を有し、大歯車24の前記突出面と、第1の従動歯車7の前記大歯車との対向面間に凸部(環状リブ30,31)が設けられている。
(もっと読む)
ベルト式無段変速機
【課題】レイアウト自由度の向上を図ることができるベルト式無段変速機を提供すること。
【解決手段】プーリ(セカンダリプーリ22)と一体に回転するトーンホイール(セカンダリ側トーンホイール25)と、このトーンホイール25と対向するセンサ(セカンダリプーリ回転数センサKS2)と、を有するプーリ回転を検出する回転状態検出装置を設けたベルト式無段変速機において、トーンホイール25は、可動プーリ(セカンダリ可動円錐板22b)の移動方向に沿って延在する円筒部25bを有し、この円筒部25bには、全周にわたって周方向に等間隔に配置されると共に、移動方向に沿って延在した複数の被検出部(長孔26)を設けた。
(もっと読む)
回転角検出装置
【課題】主動ギヤおよび従動ギヤが低トルクでスムーズに回転可能で、それらの各ギヤの歯に破損を生じにくくすることができ、また部品点数を少なくできる回転角検出装置を実現する。
【解決手段】回転角検出装置10は、ホルダ30の片側から取り付けられるカバー20と、その反対側から取り付けられる回転コネクタ40の底板45とから構成される。そして、ホルダ30とカバー20との間に空間S1を形成し、ホルダ30と底板45との間に空間S2を形成する。主動ギヤ12及び従動ギヤ13,14は、ホルダ30とカバー20との間に挟持され、空間S2において回路基板70がホルダ30に固定されることによって、空間S1とS2とが隔絶される。
(もっと読む)
電気制御アクチュエータ
【課題】所定の目的に向けて汎用設計されたコンパクトな構造を有する電気制御アクチュエータを提供する電気制御アクチュエータを提供する。
【解決手段】機械的な変位を制御される装置に用いられる、電気駆動モータ2と360°以上の回転調整域で制御可能な駆動軸4とを備えた電気制御アクチュエータ1。駆動軸4の回転位置の検出ならびにフィードバックを行うために一体に組み込まれた非接触式角度検出手段6を有し、角度検出手段6は特性の点で通常のマルチポテンショメータ機構に対する置き換えが可能となる出力信号を発生する。
(もっと読む)
回転角度検出装置
【課題】絶対角度を高精度にて測定可能な回転角度検出装置を提供する。
【解決手段】回転角度検出装置(10)が有する演算手段は、第1の従動歯車(20a)の回転角度α及び第2の従動歯車(20b)の回転角度に基づいて、第1の従動歯車(20a)の回転数iと第2の従動歯車(20b)の回転数jとが同じであるか否かを判定するための少なくとも1つの指標Iを計算し、計算された指標Iに基づいて第1の従動歯車(20a)の回転数iと第2の従動歯車(20b)の回転数jとが同じであるか否かを判定し、当該判定結果に基づいて第1の従動歯車(20a)の回転数i及び第2の従動歯車(20b)の回転数jを計算し、そして、計算された第1の従動歯車(20a)の回転数i及び第2の従動歯車(20b)の回転数jに基づいて絶対角度θを計算する。
(もっと読む)
回転角度検出装置
【課題】主動歯車の回転角度を理論上検出可能とされる全範囲において正確に検出することができる回転角度検出装置を提供する。
【解決手段】マイクロコンピュータは、周期数iを求めるに際して、関係式(e)が成立する場合には式(c)に基づき周期数iを算出する。関係式(f)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを加算して、また関係式(g)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを減算して周期数iを算出する。この算出される周期数iを式(d)に適用して絶対回転角度θrを算出する。
i=(θab−θa)/(mΩ/z)・・・(c)
θr=m(α+iΩ)/z・・・(d)
0≦θab−θa≦θabLimit・・・(e)
θab−θa<0・・・(f)
θab−θa>θabLimit・・・(g)
(もっと読む)
回転角検出装置
【課題】主動ギヤおよび従動ギヤが低トルクでスムーズに回転可能で、それらの各ギヤの歯に破損を生じにくくすることができる回転角検出装置を実現する。
【解決手段】回転角検出装置10は、ホルダ30の両側からカバー20及びケース40を取り付けて、ホルダ30とケース40との間に空間S1を形成し、ホルダ30とカバー20との間に空間S2を形成する。主動ギヤ12及び従動ギヤ13,14は、ホルダ30とケース40との間に挟持され、空間S2において回路基板70がホルダ30に固定されることによって、空間S1とS2とが隔絶される。
(もっと読む)
回転角検出装置
【課題】部品点数が少ない簡単な構造で従動ギヤのがたつきを抑えることができる。
【解決手段】回転角検出装置10は、ハウジングを構成する金属板から成形されたカバー20及びケース40の他に、内部に合成樹脂製のホルダ30を備えている。また回転角検出装置10は、ステアリング軸等の検出対象物と一体に回転する合成樹脂製の主動ギヤ12と、主動ギヤ12に噛み合った状態でその回転に従って回転する2つの合成樹脂製の従動ギヤ14とを備える。従動ギヤ14はホルダ30とケース40との間に挟み込まれた状態で、それぞれの支持部38,42により回転自在に支持されている。
(もっと読む)
回転角検出装置及びその製造方法
【課題】主動ギヤと噛み合う従動ギヤの位相差を用いて絶対角度を検出する回転角検出装置において、実用に適した範囲内でより自由度の高い歯数の組み合わせを実現する。
【解決手段】回転角検出装置は、互いに歯数Z1,Z2の異なる第1及び第2主動ギヤ12b,12cと、これら主動ギヤ12b,12cとそれぞれ噛み合う第1及び第2従動ギヤ14,15を備えており、第1及び第2従動ギヤ14,15の歯数S1,S2が互いに異なっている。この構造では、それぞれの歯数Z1,Z2,S1,S2を一定の条件下で柔軟に設定することができる。このため、例えば第1及び第2主動ギヤ12b,12cの歯数差を新たに調整する必要が生じたとしても、それまでのサイズを極端に大型化することなく、各歯数を最適に設定することができる。
(もっと読む)
回転角検出装置
【課題】僅かな異常が発生しても、基本性能を維持できる回転角検出装置を提供する。
【解決手段】回転角検出装置は、互いに歯数Z1,Z2,Z3の異なる第1〜第3主動ギヤ12b,12c,12dと、互いに歯数S1,S2,S3の異なる第1〜第3従動ギヤ14,15,17を備えている。各従動ギヤ14,15,17の回転角α,β,γをそれぞれ検出し、その中から2つの角度信号を用いて絶対角度θを演算する。このとき、いずれかの回転角α,β,γの角度信号に関して異常が発生しても、その他の2つを用いて正確に絶対角度θを検出することができる。
(もっと読む)
回転角度位置検出装置
【課題】 2ロータ回転角度位置を適正に検出できるとともに、そのコストを削減できる回転角度位置検出装置を提供する。
【解決手段】 回転角度位置検出装置1は、回転機20の回転磁界、第1および第2のロータ23,25の間の回転速度の所定の共線関係と同じ回転速度の共線関係を互いの間に保ちながら回転可能な3つの要素を有し、3つの要素の1つR1と他の1つC1,R2の回転速度の差と、他の1つの要素C1,R2と残りの1つの要素C2の回転速度の差との比が、回転磁界と第2ロータ25の回転速度の差と、第2ロータ25と第1ロータ23の回転速度の差との比と同じに設定され、残りの1つの要素C2および他の1つの要素C1,R2が、第1および第2のロータ23,25にそれぞれ連結されており、回転機20のステータ24に対する1つの要素C2の回転角度位置が、2ロータ回転角度位置θCとして、角度位置センサ3によって検出される。
(もっと読む)
回転角度検出装置
【課題】ステアリングシャフトの操舵角検出装置において、コスト増を招くことなく、高精度にギアの歯欠け異常を検出する。
【解決手段】ステアリングシャフトと一体のロータギアに対して増速側検出用ギアと減速側検出用ギアを連動して回転させ、両検出用ギアに付設したMRセンサ7a、7bからのサンプリングデータを増速機構側演算部60および減速機構側演算部70で演算処理してステアリングシャフトの増速角と減速角を算出する。故障診断部80では、増速角および減速角移動平均化処理部81、82で増速角と減速角のそれぞれ移動平均値を算出し、差分算出部84で各移動平均値の差分を算出して、変位量算出部86で求めたサンプリングごとの差分の変位量が基準値S0より大きいときに、異常検出部88が各ギアの連動系統のいずれかにギアの歯欠け異常がある旨の異常信号を出力するものとした。
(もっと読む)
アウターロータ型レゾルバ構造
【課題】従来のアウターロータ型レゾルバ構造は、各遊星歯車10を支持するための第1及び第2歯車取付板8,9が設けられているので、レゾルバ全体の軸方向の幅が厚くなっている。
【解決手段】本発明によるアウターロータ型レゾルバ構造は、中空軸5の回転により複数の減速歯車15及び輪状接続体11を介して輪状レゾルバロータ12を減速回転させる構成であって、ケース3に設けられたケース軸支部3cと、輪状レゾルバステータ4に設けられた複数のステータ軸支部4cとによって各減速歯車15を軸支することを特徴とする。
(もっと読む)
回転角度検出装置
【課題】回転角度検出装置の部品点数を削減できると共に、検出回路の出力信号の誤差要因が少なくなるため、ロジック回路や増幅回路を簡略化でき、回転角度検出装置のコストダウンを達成する。
【解決手段】コイル及び抵抗体からなる検出素子部を含む検出回路と、コイルのインダクタンスを被測定回転体の回転に応じて変化させるインダクタンス変化手段とを有する角度検出手段を備え、さらに検出回路に出力信号を発生させるための基準パルス電圧発生手段と、検出回路の出力信号を演算する演算手段とを備えている回転角度検出装置であって、演算手段は、基準パルス電圧発生手段で発生した基準パルス電圧を前記検出回路に入力した際に生じる過渡現象的出力電圧を所定時間積分して積分値を求め、該積分値に基づいて前記被測定回転体の回転角度を検出する。
(もっと読む)
回転角度検出装置
【課題】少ない部品点数で構成されるにも関わらず、温度変化の激しい環境下においても広範囲の回転角度に亘って検出精度に優れた回転角度検出装置を提供する。
【解決手段】コイル及び抵抗体からなる検出素子部を含む検出回路と、コイルのインダクタンスを被測定回転体の回転に応じて変化させるインダクタンス変化手段とを有する角度検出手段を備え、さらに検出回路110,120に出力信号を発生させるための基準パルス電圧発生手段101と、検出回路の出力信号を演算する演算手段とを備えている回転角度検出装置であって、基準パルス電圧発生手段で発生した基準パルス電圧と、基準パルス電圧が入力された際の検出回路の出力電圧とを比較して被測定回転体の回転角度を算出する。
(もっと読む)
回転角検出装置
【課題】回転軸の回転角を複数回転に亘って精度良く検出することができる回転角検出装置を提供する。
【解決手段】ステアリング軸3の回転角を複数回転に亘って検出する回転角検出装置において、ステアリング軸3の回転を遊星歯車減速機7によりキャリア73に減速伝達し、レゾルバ45によりステアリング軸3の回転に応じて周期的に変化する信号を出力し、レゾルバ6によりキャリア73の回転に応じて周期的に変化する信号を出力するように構成してある。この結果、遊星歯車減速機7の減速比を適宜選定することにより、レゾルバ45,6の出力信号に基づいて、ステアリング軸3の回転角を複数回転に亘って算出することができ、全舵角範囲に亘る舵角を求めることができる。
(もっと読む)
回転角度検出装置
【課題】ギア間のガタつきが少なく検出精度の高い回転角度検出装置を提供する。
【解決手段】ステアリングシャフトと一体に回転するロータ歯車3の回転を遊星歯車機構によって構成された減速機構5によって減速し、該減速後の回転を減速側検出用ギア6に伝達するものとしたので、回転の伝達効率がよく、また減速機構5を構成する各ギアの軸が同一方向であるため、ステアリングシャフトの回転を少ないガタによって減速側検出用ギア6に伝達することができる。したがって、減速機構5でのガタつきが少ないのでステアリングシャフトの回転角をより正確に検出することができる。
(もっと読む)
複速レゾルバ
【課題】本発明は、減速機構として遊星ギア機構を用いることにより、構造簡単で小型化した複速レゾルバを得ることを目的とする。
【解決手段】本発明による複速レゾルバ構造は、第1レゾルバ(73)の近傍に設けられる第2レゾルバ(74)の第2輪状ロータ(5)を遊星ギア(70)を用いて減速回転する回転部材(60)に設けると共に、各ステータ巻線(75,75a)を共通の輪状ステータ(1)に設けることにより、従来よりも小型で大きい減速比の多回転検出を行うことができる構成である。
(もっと読む)
1 - 20 / 37
[ Back to top ]