
Fターム[2F077TT47]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 内挿、補間 (427) | 逓倍又は分周回路を用いるもの (38)
Fターム[2F077TT47]に分類される特許
1 - 20 / 38
車輪回転角度検出装置
【課題】ABS信号を用いて、車輪回転角度を高精度で検出する。
【解決手段】車輪一回転につきN周期の正弦波状の波形を有するABS信号を用いて、車輪回転角度を検出する。車輪回転角度検出装置は、角度信号生成部を有する演算器を具え、該角度信号生成部は、ABS信号を時間について微分したABS微分信号を生成するステップと、ABS信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P1、P2を生成するステップと、前記ABS微分信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P3、P4を生成するステップとを行うことにより、一周期の波形毎に前記4つの角度信号P1〜P4を含む角度信号Pを生成する。
(もっと読む)
角度検出装置、モータ駆動装置及び画像形成装置

【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
(もっと読む)
エンコーダ信号処理回路
【課題】エンコーダ停止時の誤カウントなどを防止可能なエンコーダ信号処理回路を提供する。
【解決手段】エンコーダ信号のA相パルスとB相パルスからクロック同期のA相パルスとB相パルスを生成する回路と、クロック同期のA相パルスとB相パルスから4逓倍パルスを生成する4逓倍パルス生成回路と、クロック同期のA相パルスとB相パルスが交互に入力されているか否かに基づきエンコーダの停止時期を示す信号を作成する交互チェック回路と、前記エンコーダの停止時期以外に前記4逓倍パルスからノイズ除去済み4逓倍パルス信号を発生する回路とを有するエンコーダ信号処理回路。
(もっと読む)
位置検出装置、及び駆動装置
【課題】被駆動体の位置を高精度に検出する。
【解決手段】位置検出装置は、変調した駆動信号を生成する変調部と、変調部によって生成された駆動信号と被駆動体の位置とに応じた検出信号を出力する検出素子を有し、変調された出力信号を検出信号に基づいて出力する検出部と、検出部から出力された出力信号を周波数逓倍した逓倍信号を生成する信号逓倍部と、信号逓倍部によって生成された逓倍信号に基づいて、被駆動体の位置を検出する位置検出部と、を備える。
(もっと読む)
モータロータ及びモータ
【課題】回転検出器の構成部品の一部を省略して回転検出器付きモータの全体構成の部品点数と工数を削減すること。
【解決手段】回転検出器付きモータ1は、回転軸5と、回転軸5の周りに配置され、軸方向に延びる複数の貫通孔6aが設けられる鉄心部6と、複数の貫通孔6aにそれぞれ収容される複数の永久磁石7と、複数の貫通孔6aの開口を塞ぐように鉄心部6の両端に設けられる一対の端板8A,8Bと、コイル3aを含むモータステータ3とを備える。両端板8A,8Bは、非磁性体で構成され、一方の端板8Aの軸方向外面に、周方向に交互に配置された角度検出用の凹凸が設けられる。モータロータ4の端板8Aの軸方向外面に設けられた凹凸に対向する位置には、高周波信号が入力される励磁コイルを備えたセンサステータ13が設けられる。
(もっと読む)
移動体の絶対位置検出装置
【課題】大掛かりな着磁管理をすることなく、低コストで移動体の絶対位置を検出できる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置検出装置1であって、演算器30は、逓倍回路18にて所定の区画に区分された、相対位置検出手段により検出された検出信号および逓倍回路18にて逓倍した検出信号のいずれかの区画において、絶対位置検出手段により検出した絶対位置信号が着磁信号を検出したときに、演算器30に備えられている記憶装置に1信号ピッチ分の情報を記憶し、これを移動体絶対位置特定スケール20の分解能分全てについて行うことにより移動体の絶対位置を特定する。
(もっと読む)
回転検出装置付き車輪用軸受
【課題】 異物の噛み込みによる磁気エンコーダの損傷を防止でき、かつ十分な回転検出精度が得られる回転検出装置付き車輪用軸受を提供する。
【解決手段】 転動体5を介して相対回転可能とされた外方部材1と内方部材2とを備え、車体に対して車輪を回転自在に支持する車輪用軸受である。外方部材1および内方部材2のうちの回転側部材の軸方向一端部に、円周方向に並ぶ複数の磁極対が等配された環状の磁気エンコーダ22を回転側部材と同心に設ける。この磁気エンコーダ22に対峙して磁気エンコーダ22の磁極対を検出するセンサ23を設ける。磁気エンコーダ22とセンサ23の間に介在して磁気エンコーダ22を保護する保護カバー18を設ける。センサの出力から磁極対の位相を逓倍する逓倍手段24を設ける。
(もっと読む)
エンコーダ、サーボユニット及び位置データ算出方法
【課題】より正確な位置データを測定することができるエンコーダ、サーボユニット及び位置データ算出方法を提供すること。
【解決手段】このエンコーダ100は、検出対象の位置を表す検出信号Dを検出する検出部110と、検出信号に基づいて、離散的なサンプリングタイミングtで、検出対象の位置を表す第1ビット幅の第1位置データAを算出する第1位置データ算出部120と、第1位置データを第1ビット幅よりも長い第2ビット幅の第2位置データBに変換する第1データ変換部130と、連続した2以上のサンプリングタイミングの第2位置データBに基づいて、タイミングデータが入力されると位置データを導出する近似関数FBを算出する近似部140と、近似関数に基づいて出力タイミングにおける検出対象の位置を表す第3位置データCを算出する第3位置データ算出部150と、を有する。
(もっと読む)
磁気式エンコーダ
【課題】 出力信号の精度を向上した磁気式エンコーダを提供する。
【解決手段】 平行に配列された複数の磁気抵抗効果素子を有する磁気センサーと、前記磁気センサーに対して相対移動する磁気媒体とを備えており、
前記磁気媒体は、周期2λmで変化する磁化パターンを有し、
前記複数の磁気抵抗効果素子は、ピッチλで配列する少なくとも4個でブリッジ接続を構成しており、
前記λはゼロより大きく且つ前記λmよりも小さく、前記磁気抵抗効果素子はスピンバルブ型巨大磁気抵抗効果素子であり、
前記磁気抵抗効果素子の長手方向は、前記磁化パターンの長手方向に対して傾いている磁気式エンコーダを用いる。
(もっと読む)
回転位置センサ
【課題】回転角度の高い分解能を得られると同時に、小型化した回転位置センサを提供すること。
【解決手段】ロータ平板13の外周部につづら折り状の励磁コイル14が形成され、内周部にロータ側ロータリィトランス7が形成されていること、ステータ平板11の外周部に、つづら折り状のn個の検出コイル12A、12B、12C、12D(本実施の形態では、n=4)が形成され、内周部にステータ側ロータリィトランス8が形成されていること、4個の検出コイル12A、12B、12C、12Dが、重なり合わないように、円周方向に並べて配置されていること、4個の検出コイルは、各々、電気角で360度/8ずつずらして配置されていること、ステータ側ロータリィトランス8及びロータ側ロータリィトランス7を介して、励磁コイル14に高周波信号を励磁する高周波励磁回路22、21を有すること、を特徴とする。
(もっと読む)
エンコーダパルス生成装置、エンコーダパルス生成方法、及び、コンピュータプログラム
【課題】 エンコーダで得られたアナログエンコーダ信号に基づいて検出された角度に応じて生成されるエンコーダパルス信号のエッジが乱れることを容易に且つ確実に抑制する。
【解決手段】 擬似正弦波として入力されたアナログエンコーダ信号102、104に基づいて、エンコーダで検出した角度を示す角度データ152を導出し、導出した角度データ152に基づいてエンコーダパルスのデータを順次生成する。この際に、出力したエンコーダパルスのデータをラッチしておく。そして、逓倍設定値に基づくエンコーダパルスの変化点からα度の範囲では、それまでにラッチしておいたデータを使用し、その他の角度の範囲では、生成したデータを使用する。
(もっと読む)
検出システム、制御システム、画像形成システム及び制御方法
【課題】高精度な位置制御及び速度制御を実現可能とする。
【解決手段】エンコーダ装置40から出力される正弦波のアナログA相及びB相信号を、信号処理回路50で次のように変換する。即ち、信号処理回路50では、アナログA相及びB相信号をディジタル化して無逓倍のディジタルA相及びB相信号を生成すると共に、アナログA相及びB相信号を4倍に逓倍且つディジタル化して、ディジタル逓倍A相信号及びディジタル逓倍B相信号を生成する。更には、ディジタルA相及びB相信号の排他的論理和(XOR)信号を、ディジタルZ相信号として生成する。位置検出部61は、ディジタル逓倍A相信号及びディジタル逓倍B相信号に基づき、対象物の位置を検出する。一方、速度検出部631,632,633は、ディジタルA相信号、又は、ディジタルZ相信号、又は、ディジタルA相及びB相信号の両者に基づき、対象物の速度を検出する。
(もっと読む)
回転位置検出装置およびそれを用いたモータ駆動システム
【課題】低コストで信頼性が高く、かつ、小型化が容易な回転位置検出装置を提供する。
【解決手段】レゾルバ1は、ブリッジ回路を構成するように接続された4組のコイルL1〜L4を有するステータと、コイルL1〜L4のインダクタンスを正弦波状に変化させることが可能な形状を有するロータとを備える。励磁回路18は、基準パルス信号emに基づく励磁パルス信号をレゾルバ1に供給する。信号処理手段7は、基準パルス信号emを生成する処理と、基準パルス信号emあるいは基準パルス信号emを分周した信号に同期したA/D変換タイミング信号を生成する処理と、A/D変換タイミング信号に応じてレゾルバ1の出力信号をA/D変換する処理と、A/D変換処理結果に基づいてレゾルバ1のロータの回転位置を演算する処理とを実行するマイクロプロセッサを備える。
(もっと読む)
回転位置検出装置及びそれを用いたモータ駆動システム
【課題】低コストで信頼性が高く、かつ、小型化が容易な回転位置検出装置を提供する。
【解決手段】レゾルバ1は、突極の数が2n−1(nは正の整数)であるロータ、等角度間隔で順次配列する第1、第2、第3及び第4の磁極を有したステータ、及びステータの各磁極に巻着した単一のコイル(L1〜L4)を有する。励磁手段9、18は、第1、第2のコイルL1、L2の接続点に所定周波数の第1の励磁信号を供給し、第3、第4のコイルL3、L4の接続点に第1の励磁信号を反転した第2の励磁信号を供給する。信号処理手段7は、第1、第3のコイルL1、L3の接続点からの第1の出力信号と、第2、第4のコイルL2、L4の接続点からの第2の出力信号とに基づいてロータの回転位置を算出する。
(もっと読む)
レゾルバ信号変換装置及び方法
【課題】入力されたレゾルバ信号からモータが発生する磁界やPWM駆動によるスイッチングノイズなどの外乱ノイズによる影響を排除し、演算処理の周波数依存性を無くすことによって、検出角度の誤差を低減できるようにしたレゾルバ信号変換装置及び方法を提供する。
【解決手段】レゾルバからの正弦波出力を増幅してアナログ−デジタル変換したのち、帯域通過フィルタを通して励磁信号の周波数を中心周波数とする所定の帯域の周波数成分を取り出して、前記励磁信号に基づくリファレンス信号と同期させてサンプリングし、このサンプリングされた信号から検出角度信号の正弦値を作成する。同様にして、レゾルバからの余弦波出力から検出角度信号の余弦値を作成し、検出角度信号の正弦値及び余弦値から検出角度を算出する。
(もっと読む)
磁気エンコーダおよび回転検出装置
【課題】 複列の磁気エンコーダトラックについて、磁気干渉を生じることなく簡単に着磁し得ると共に着磁精度の向上を図り、製造コストの低減を図ることができる磁気エンコーダおよび回転検出装置を提供する。
【解決手段】 この発明の磁気エンコーダ1は、隣合う複列の環状の磁気エンコーダトラック3,4と、芯金2とを有する。複列の磁気エンコーダトラック3,4の被検出面3a,4aを、この磁気エンコーダ1の軸心方向L1を含む平面で切断して見た断面について、前記軸心方向L1に対し斜めに設ける。芯金2を、この磁気エンコーダ1の軸心方向L1を含む平面で切断して見た断面でL形とし、円筒状の内周面7を、回転部材からなる取付対象8の外周面8aに圧入嵌合する。
(もっと読む)
エンコーダ
【課題】出力信号であるエンコーダ方形波信号の線形性を向上させ、且つ、当該エンコーダの電源投入後に即利用することが可能なエンコーダを提供すること。
【解決手段】エンコーダ1を構成するエンコーダヘッド2及び逓倍信号処理部3を、次のように構成する。エンコーダヘッド2に、スケール4との相対変位に基づく略正弦波状信号を生成する信号処理部13と、略正弦波状信号の中心電圧を逓倍信号処理部3へ出力する為の設定を行う第1スイッチ部14a,第2スイッチ部14bと、を具備させる。逓倍信号処理部3に、略正弦波状信号の中心電圧と前記所定の基準電圧とに基づいてオフセット電圧を検出するオフセット電圧検出部27と、検出されたオフセット電圧に基づいて、略正弦波状信号のオフセット電圧を補正するオフセット電圧補正部29と、補正された略正弦波状信号を逓倍処理して出力する逓倍処理部30と、具備させる。
(もっと読む)
デジタルスケールの検出信号補正方法及び検出信号補正装置
【課題】検出部のエンコーダ信号である2相正弦波信号が、リサージュ波形の表示時において2重になるときも、位置を正確に検出、補正することができるデジタルスケールの検出信号補正方法及び検出信号装置を提供すること。
【解決手段】デジタルスケールの検出信号補正方法及び検出信号補正装置は、2相正弦波信号の周波数の整数分の1の周波数を有する信号により補正を行い、また、2相正弦波信号を組とし、2つの補正区間ごとに各相正弦波信号のオフセット、大きさの比、位相差を補正することにより、高精度の位置検出を可能とするものである。
(もっと読む)
車両制御装置
【課題】 車間距離等の対象物との離間距離を計測する離間距離測定手段の測定結果に検知性能の低下や誤差が生じていても、離間距離を正しく認識して信頼性の高い車両制御が行える車両制御装置を提供する。
【解決手段】 車輪の回転速度を検出する回転検出装置1と、その出力信号から車両移動量を検出する車両移動量検出手段16とを設ける。車両と対象物との間の離間距離を非接触で計測するレーザレーダ等の離間距離測定手段14を設ける。離間距離測定手段14で検出された離間距離と車両移動量検出手段16で検出された車両移動量とを用いて車両の移動の制御を行う車両移動制御手段17を設ける。
(もっと読む)
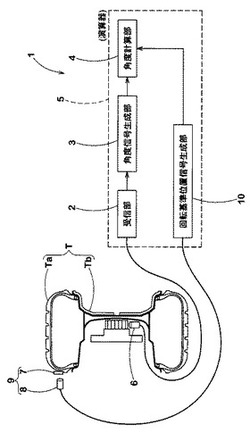
回転検出装置および回転検出装置付き軸受
【課題】 検出対象の回転体の回転速度に応じて検出分解能を選択できて、標準的な入力信号分解能の処理制御装置でも回転検出信号を処理できる回転検出装置、およびその回転検出装置を搭載した回転検出装置付き軸受を提供する。
【解決手段】 回転検出装置1は、円周方向に並ぶ複数の被検出極2cが等配されたエンコーダ2と、その被検出極2cを検出するセンサ3とを有しエンコーダ2が取付けられた検出対象の回転体の回転を検出する。センサ3の出力から被検出極2cの位相を逓倍する逓倍手段4と、その逓倍出力が入力されて少なくとも2種類の互いに異なる倍率のパルスを生成するパルス生成手段5を設ける。また、回転体の回転速度を検出する速度検出手段10と、その検出回転速度に応じてパルス生成手段5の生成するパルスから1種類の倍率のパルスを選択して出力するパルス選択出力手段11を設ける。
(もっと読む)
1 - 20 / 38
[ Back to top ]