
Fターム[2F077UU19]の内容
感知要素の出力の伝達及び変換 (32,270) | 特性補償又は雑音除去のための処理又は手段 (837) | 信号の位相調整 (76) | 位相差の調整 (36)
Fターム[2F077UU19]に分類される特許
1 - 20 / 36
検出装置、駆動装置
【課題】回転体の正確な回転角度の算出などに必要な処理量を削減する。
【解決手段】回転体の回転角度に応じて、それぞれの位相が異なる複数の正弦波信号を出力する検出手段と、前記複数の正弦波信号に基づいて、前記回転体の回転角度を算出する算出手段と、前記回転体の、基準となる回転角度を含む基準信号を出力する基準信号出力手段と、前記算出手段により算出された回転角度と、前記基準信号出力手段が出力した基準信号に含まれる回転角度とに基づいて、前記検出手段により出力された前記複数の正弦波信号の振幅が同一または略同一になるように調整する調整手段と、を有することを特徴とする検出装置。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
絶対測長型エンコーダ
【課題】ABSパターン情報の伝送遅延によるABSトラックとINCトラック照合時又は合成時の位置誤差を低減する。
【解決手段】インクリメンタルトラック12とアブソリュートトラック14を有し、前記インクリメンタルトラック12から得たインクリメンタル位置情報と前記アブソリュートトラック14から得たアブソリュート位置情報を照合又は合成するようにされた絶対測長型エンコーダにおいて、前記アブソリュート位置情報を要求してから受信する迄の時間に応じて、前記インクリメンタル位置情報の取得を遅らせる遅延手段(54)を備える。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジから出力される出力信号を取得し、位相ずれαを補正するための位相補正値φを出力信号の組合せ毎に算出し、メモリ部52に記憶する。制御部51は、出力信号の一部に異常が生じた場合でも、異常が生じていない出力信号の組合せに対応した位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
位置検出器
【課題】2相正弦波信号に歪みが発生した場合でも、より正確な位置検出を行うことが可能な位置検出器を得ること。
【解決手段】モータの回転速度に比例し、直交性を有する複数の2相正弦波の各相アナログ信号を生成するアナログ信号生成部と、各相アナログ信号を等間隔でサンプリングした各瞬時値を各相デジタル信号に変換するAD変換器と、各相デジタル信号の位相補正値を演算する位相補正値演算部8と、位相補正値に基づいて、各相デジタル信号の位相差を90度に補正して出力する信号補正部と、信号補正部の各相出力信号に基づいて、モータ1の位置情報であるモータ角度を演算する角度演算部とを備え、位相補正値演算部8は、各相デジタル信号を正弦波形にフィッティングして出力する正弦波フィッティング手段11と、正弦波フィッティング手段11の各相出力に基づいて、位相補正値を演算して出力する位相差演算手段12とを備える。
(もっと読む)
角度検出装置
【課題】回転軸の角度検出を高精度にする。
【解決手段】一つの実施形態によれば、角度検出装置では、レゾルバが回転機器の回転軸の角度検出を行い、回転角度に応じて励磁信号を振幅変調した第1の信号及び第1の信号と直交する第2の信号を生成する。第1のAD変換部は、第1の信号が入力され、第1の信号をアナログ・デジタル変換する。第2のAD変換部は、第2の信号が入力され、第2の信号をアナログ・デジタル変換する。第1の遅延回路は、第1のAD変換部から出力される第3の信号が入力され、第3の信号の位相調整を行う。第2の遅延回路は、第2のAD変換部から出力される第4の信号が入力され、第4の信号の位相調整を行う。位相検出調整手段は、第1及び第2の遅延回路から出力される信号の位相をモニターし、位相ズレが発生した場合に第1及び第2の遅延回路に位相調整の指示をする。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す第1の補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、予め生成されている複数の補正テーブルの中から、第2位置情報の相対的な変位に応じて第2の補正テーブルを選択し、選択した第2の補正テーブルに基づいて、第1の補正テーブルを変更する補正テーブル変更部とを備える。
(もっと読む)
エンコーダ装置、駆動装置、及びロボット装置
【課題】位置情報を高精度に検出することができるエンコーダ装置を提供する。
【解決手段】エンコーダ装置は、第1信号を出力する第1のエンコーダと、第2信号を出力する第2のエンコーダと、第1信号に基づいて、第1のエンコーダの回転位置情報を示す第1位置情報を生成する第1位置情報生成部と、第2信号と第2のエンコーダの回転位置情報の補正値を示す補正テーブルとに基づいて、第2のエンコーダの回転位置情報を示す第2位置情報を生成する第2位置情報生成部と、第1位置情報と第2位置情報とを用いて前記第1位置情報に対する第2位置情報の相対的な変位を検知する判定部と、第2位置情報の相対的な変位を検知した場合に、第2位置情報の変位に応じて補正テーブルを生成する補正テーブル生成部とを備える。
(もっと読む)
回転検出器およびその位相誤差補正方法
【課題】簡易な演算のみによって2相信号の位相誤差を補正可能な回転検出器を提案すること。
【解決手段】回転検出器1のセンサ部3から発生するA相センサ信号Va0とB相センサ信号Vb0の位相誤差φを事前に測定しておく。また、2相信号からオフセット補正が施された振幅AのA相信号Va(=Asinθ)、振幅BのB相信号Vb(=Bcos(θ−φ))を生成するために用いる振幅A、Bと、A相信号Va、B相信号Vbにゲイン補正を施して、A相補正信号Va1(=r1・Asinθ)、B相補正信号Vb1(=r2・Bcos(θ−φ))を生成するために用いる調整ゲインr1、r2とが、{(r2・B/r1・A)}cosθ=1と(r2・B)/A=1を共に満足するように、これらの値を調整しておく。これにより位相誤差が補正されたA相補正信号Va1、B相補正信号Vb1が得られ、これに基づき回転角度θが算出される。
(もっと読む)
センサ装置
【課題】本発明は、センサ装置の検出精度を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、位相調整部30が前記ドライブ入力処理部10の温度特性と検波部21の温度特性との差を用いてドライブ信号の位相を調整する構成としたものである。この構成により、ドライブ入力処理部10や検波部21が温度特性を持っていても、位相調整部30がドライブ入力処理部10の温度特性と検波部21の温度特性との差を用いてドライブ信号の位相を調整するため、ドライブ信号とセンス信号との周波数ずれの発生を抑制することができ、正しい検波を可能とすることができるため、その結果としてセンサ装置の検出精度を向上させることができるのである。
(もっと読む)
エンコーダ信号の補正回路
【課題】オフセット・振幅・位相に周期的な変動が含まれる2相アナログ正弦波に対して補正値の更新を無効から有効に切替える場合でも、補正値にギャップが発生せずにずれのない内挿分割データを出力するエンコーダ信号の補正回路を提供する。
【解決手段】直交するA相とB相のアナログ正弦波信号から位置データ14aを出力するエンコーダにおいて、補正値演算部20と、速度判定フラグ21aを出力する速度判定部21と、前記速度判定フラグ21aが高速のときに補正値更新フラグ22aを無効とし、速度判定フラグが低速でさらに前記演算補正値20aと前記信号補正値23aとが一致したときに補正値更新フラグを有効にする補正値更新判定部と、前記補正値更新フラグ22aに従い有効の場合は信号の補正で使用する信号補正値23aを前記演算補正値20aで更新し、無効の場合は信号補正値を更新せず保持する補正値更新部23とを備える構成とする。
(もっと読む)
誤差決定方法、誤差決定装置、位置検出方法及び演算手順
【課題】 位置検出器が出力する位置信号に含まれる誤差を精密かつ容易に決定する。
【解決手段】 本発明は、被検出物の位置を検出する位置検出器により出力される互いに90度の位相差を有する2つの正弦波状で表される位置信号に含まれる誤差を決定する方法に関する。誤差決定方法は、一定の速度で移動させた被検出物の位置を前記位置検出器により一定の時間間隔で検出して得られた2つの正弦波状の位置信号をアークタンジェント演算して時刻と位相との関係を示す第1データを取得する取得工程と、前記取得工程で取得された第1データを回帰演算して時刻と位相との関係を示す第2データを決定する回帰演算工程と、前記取得工程で取得された第1データと前記回帰演算工程で決定された第2データとを比較して位相の誤差を前記位置信号に含まれる誤差として決定する誤差決定工程と、を含む。
(もっと読む)
静電型エンコーダ
【課題】静電気作用で位置情報を検出でき、必要に応じて固定子を可能な限り長尺化できる静電型エンコーダを提供する。
【解決手段】この静電型エンコーダは、誘導電極および電位検出電極を有する固定子31、櫛歯状電極を有し、固定子の上で移動するように設けられた移動子32と、固定子の電位検出電極から出力される信号に基づいて固定子に対する移動子の相対的変位に係る出力信号を生成する信号処理装置50とを備え、固定子の電位検出電極は4相の電極31cを含み、複数の固定子は、4相の電極(A,B,C.D)が規則的な距離位置に配列するように配置され、複数の固定子の各々の間に、4相の電極同士を接続する接続回路部112を備える。
(もっと読む)
外部調整型エンコーダ
【課題】所定の信号調整が行なわれないでエンコーダが稼動するのを防いで、信号調整の信頼性を確保し、エンコーダ本来の性能を実現する。
【解決手段】スケール10と、スケール10に対して相対変位可能な検出ヘッド20と、外部との通信手段36とを備え、該通信手段36に接続された外部装置(パソコン50)による信号調整が可能とされた外部調整型エンコーダにおいて、スケール10に対して検出ヘッド20が相対変位するのに伴って検出される複数の正弦波上の検出信号における振幅、オフセット、位相差の信号調整の実施の有無をメモリ38に記憶し、信号調整が未実施の場合は、エンコーダからの位置情報を入力してフィードバック制御を行う制御装置46に知らせる。
(もっと読む)
静電型エンコーダおよびリニアモータ
【課題】静電気作用で位置情報を検出する静電型エンコーダであり、移動子の取付け構造を簡単にし、移動子取付け後の位置合わせが不要となり、測定信号レベルの安定化を図ることができる静電型エンコーダ、およびリニアモータを提供する。
【解決手段】静電型エンコーダ30は、誘導電極および電位検出電極を有する固定子31と、櫛歯状電極を有し固定子の上で移動するように設けられた移動子32と、固定子の電位検出電極から出力される信号に基づいて固定子に対する移動子の相対的変位に係る出力信号を生成する信号処理装置50とを備え、固定子に対して移動子を押圧接触させる板バネ部材37を備える。
(もっと読む)
角度センサのための方法および装置
センサが、磁石に対するセンサ素子の不整合の影響を最小化する。一実施形態において、センサは、磁石と、磁石に対して位置付けられた第1、第2、および第3のセンサ素子と、第1、第2、および第3のセンサ素子からの出力信号を処理して第1および第2の信号を生成し、第1および第2の信号の直角位相関係を最大化することにより、磁石に対する第1、第2、および第3のセンサ素子の位置的不整合の影響を最小化するための信号処理モジュールと、を備える。  (もっと読む)
(もっと読む)
振幅変調信号の同期検波方法及び回転信号処理器
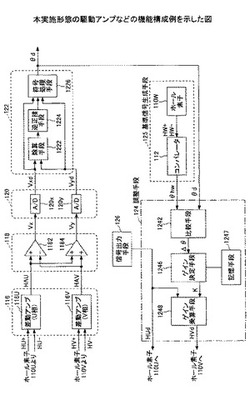
【課題】従来の振幅変調信号の同期検波方法及び回転信号処理器は、励磁信号sinωtを用いて振幅変調信号f(θ)・sin(ωt−α)の同期検波を行うので、位相差αが無視できない値として存在し、正確な同期検波を行う際の支障となっている。
【解決手段】本発明による振幅変調信号の同期検波方法及び回転信号処理器は、励磁位相基準抽出手段115が、第1及び第2振幅変調信号sinθ・sin(ωt−α),cosθ・sin(ωt−α)から搬送波位相成分ωt−αを励磁位相基準116として抽出し、同期検波手段104が、前記励磁位相基準抽出手段115から入力された前記励磁位相基準116を用いて前記振幅変調信号f(θ)・sin(ωt−α)の同期検波を行うように構成されている。
(もっと読む)
計測装置
【課題】
被計測物の位置を高精度に計測する計測装置を提供する。
【解決手段】
本発明の計測装置は、被計測物の位置を表す複数の信号を用いて被計測物の位置を計測する計測装置100であって、複数の信号のそれぞれを既知の値と比較することによって歪み係数を演算する歪み係数演算装置11と、歪み係数を用いて複数の信号を補正することにより複数の補正信号を生成する歪み補正部2と、歪み補正部2にて生成された複数の補正信号の二乗和平方根を算出する二乗和平方根演算装置3と、複数の補正信号のそれぞれを二乗和平方根で除すことにより複数の第一の正規化信号を生成する第一の正規化手段と、第一の正規化手段にて算出された複数の第一の正規化信号に基づいて、被計測物の位置を算出する位相演算装置6とを有する。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 構造が簡単で、磁気エンコーダの取付位置に左右されずに精度良く絶対角度を検出できる回転検出装置、およびこの回転検出装置を搭載した回転検出装置付き軸受を提供する。
【解決手段】 この回転検出装置1は、同心のリング状に設けられ互いに磁極数が異なる複数の磁気エンコーダ2A,2Bと、これら各磁気エンコーダ2A,2Bの磁界をそれぞれ検出する複数の磁気センサ3A,3Bとを備える。前記各磁気センサ3A,3Bは、磁気エンコーダ2A,2Bの磁極内における位置の情報を検出する機能を有したものである。これら、各磁気センサ3A,3Bの検出した磁界信号の位相差を求める位相差検出手段6を設ける。この検出した位相差に基づいて磁気エンコーダの絶対角度を算出する角度算出手段7を設ける。磁気エンコーダ2A,2Bの取付位置に起因して磁気センサ3A,3Bの検出した磁界信号に生じる初期位相差を補正する補正手段12を設ける。
(もっと読む)
回転検出装置の信号処理回路
【課題】検出対象の回転に伴って回転する回転体の回転方向を含む正確な回転情報を生成出力することのできる回転検出装置の信号処理回路を提供する。
【解決手段】
位相差補償実体部51は、第1及び第2フィルタ部50a及び50bからそれぞれ出力される第1及び第2フィルタ信号PHA_SOR及びPHB_SORに表れるノイズの影響が互いに異なる旨の判定が可能な所定の位相差補償条件が成立するか否かを判定する。また、位相差補償実体部51は、位相差補償条件が成立するとき、該位相差補償条件の成立直前の第1及び第2位相差補償出力信号PHA_R及びPHB_Rの位相関係と同一の位相関係となるように、第1及び第2位操作補償出力信号PHA_R及びPHB_R間の位相関係を補償する。
(もっと読む)
1 - 20 / 36
[ Back to top ]