
Fターム[2F103DA04]の内容
Fターム[2F103DA04]の下位に属するFターム
Fターム[2F103DA04]に分類される特許
1 - 20 / 59
位置検出方法及び装置、エンコーダ装置、並びに露光装置
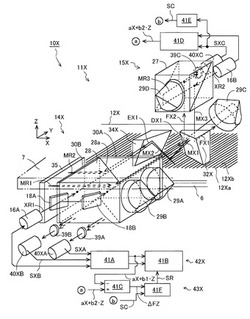
【課題】回折格子を用いて相対移動量を計測する際に、格子パターン面の法線方向の絶対位置を検出する。
【解決手段】原点検出装置11Xは、第1部材6に設けられ、X方向を周期方向とする反射型の回折格子12Xと、第1計測光MX1を回折格子12Xに第1の入射角で入射させ、回折光と第1参照光MR1との第1干渉光を検出する第1干渉ヘッド14Xと、第3計測光MX3を回折格子12Xにその第1の入射角と異なる第2の入射角で入射させ、回折光と第3参照光MR3との第3干渉光を検出する第2干渉ヘッド15Xと、その第1、第3干渉光の検出信号からZ方向の相対位置を求める第3演算部41Cと、を備える。
(もっと読む)
検出ユニット、エンコーダ

【課題】モータ軸の回転量を検出するための検出ユニットにおいて、エンコーダとしての信頼性を簡便に高める。
【解決手段】入射光の光量に対応した出力信号を出力する複数の受光素子が所定方向に配置されている受光素子アレイと、符号版の少なくとも一部に光を照射する光源と、を備え、複数の受光素子は、光の光量分布に応じて所定方向と垂直な幅方向における実効領域の幅が変更されてそれぞれ設けられている。
(もっと読む)
位置検出器の走査組立品
【課題】位置検出器の走査組立品のキャリアに対する放射線源の所定の位置決めを簡単な手段によって可能にする。
【解決手段】放射線源が、異なる位置でそれぞれの電気導体要素に電気接触していて、この放射線源4をキャリア1に対する調整軌道に沿って異なる位置に配置できるようにするため、キャリア1の電気導体要素と放射線源4の電気接続要素44,46とが、導通部分を形成し、放射線源4をキャリア1に対して固定する前に、この放射線源4が、この放射線源4と電気導体要素との間の電気接触を維持しながら調整軌道に沿ってキャリア1に対して導通部分に接して移動可能である。
(もっと読む)
スケール及びその製造方法並びにアブソリュートエンコーダ
【課題】高分解能を有するアブソリュートエンコーダに有用なスケールを提供する。
【解決手段】 アブソリュートエンコーダのスケールには、少なくとも1つの方向に沿って所定のピッチで複数のマークが配列されている。前記スケールは、前記少なくとも1つの方向に沿って前記所定のピッチで配置された光反射性または光透過性を有する複数のマークを含む基材を有する。前記複数のマークのうちの一部のマークには、光を減衰させる膜が形成されている。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
光学式アブソリュートエンコーダ及び装置
【課題】90度位相差の2つの正弦波信号を内挿演算することによって高分解能で回転位置を検出する光学式エンコーダにおいて、部品を追加することなく容易な手段で光学系の異常を検出することが可能な光学式エンコーダを提供する。
【解決手段】90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常レベルを記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力する。
(もっと読む)
エンコーダ
【課題】安定して高調波歪を抑え、位置を高精度に検出することが可能なエンコーダを提供すること
【解決手段】光源12と、受光素子17と、前記光源からの光を反射または透過することによって前記受光素子に導くパターン24Aを含む複数の単位ブロックパターンKAを含むスケール20と、を備えるエンコーダを提供する。複数の単位ブロックパターンは、X方向に沿って、ピッチPの周期で配置されており、パターンは、中心線Xcに関して対称な形状であり、各単位ブロックパターンはY方向に複数の分割領域を含み、パターンの面積比は隣接する二つの分割領域の間で異なり、各分割領域において、前記パターンは、前記測位方向に延びる2つの平行な直線と前記測位方向に垂直な方向に延びる2つの平行な直線によって規定される矩形形状を有する。
(もっと読む)
エンコーダ
【課題】大型化を招かずに広範囲で絶対位置信号を高精度に取得可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターンは、|(m・P1−n・P2)|<|(P1−P2)|を満たすように移動方向であるX方向に垂直なY方向に周期的に配列され、X方向に第1の変調周期P1と第2の変調周期P2を有する。エンコーダの信号処理手段30は、第1の変調周期P1の位相である第1の位相Φ1を取得する第1の位相取得手段32と、第2の変調周期P2の位相である第2の位相Φ2を取得する第2の位相取得手段33と、整数m、nに対し、A/B=n/mの関係を満たす2つの係数A、Bを用いてSv=A・Φ1−B・Φ2を満たすSvを前記スケールの位置を表す位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
角度測定装置の組立体およびこの組立体を製造するための方法
【課題】 簡易でかつ安定した目盛担持体の組立てを可能にする、角度測定装置のための組立体を提供することである。
【解決手段】−前記目盛担持体(1)に位置決め部材(3)が第一の材料一体的結合部を用いて固定されていること、
−目盛担持体(1)を担持している位置決め部材(3)が、支持体(2)の凹部(21)内に配置されており、位置決め部材(3)が半径方向で遊びがなく位置決めされるように凹部(21)が採寸されていること、そして
−目盛担持体(1)と支持体(2)の間に第二の材料一体的結合部が設けられていることにより解決される。
(もっと読む)
エンコーダ
【課題】スケールに対する被検出光の照射位置が基準からずれた場合でも、絶対角度を精度良く検出することができるエンコーダ、及びこのようなエンコーダに用いるエンコーダ用受光装置を提供する。
【解決手段】エンコーダ1では、一直線状の光透過部17に被検出光を透過させることにより、スケール板11において、配列ラインL1,L2の互いに離間した一部を含む領域に被検出光が照射される明部19が形成され、他の領域に被検出光が照射されない暗部20が形成される。したがって、光強度ピークP1,P2間の相対角度(基準相対角度)は、光透過部17の形状から一義的に算出できる。そこで、エンコーダ1では、角度検出時の相対角度と基準相対角度とのずれ量を補正量α°として算出することにより、スケール板11に対する被検出光の照射位置が基準からずれた場合でも、絶対角度を精度良く検出することができる。
(もっと読む)
アブソリュートエンコーダ
【課題】小型かつ低コストで高精度なアブソリュートエンコーダを提供する。
【解決手段】アブソリュートエンコーダは、第1スリットを有する第1トラック及び第2スリットを有する第2トラックを備えたスケール部と、第1及び第2スリットに光を照射する光源と、第1スリットで反射した光から得られた第1信号を検出する第1検出手段と、第2スリットで反射した光から得られた第2信号を検出する第2検出手段とを有し、第2スリットは、スケール部の移動方向における位置に応じて光源から照射された光の反射光量が異なるように形成され、演算手段は、第2検出手段で得られた光電流の電圧値又は第2信号の振幅値に基づいて上位信号を取得し、第1及び第2信号を用いてバーニア演算を行い中位信号を取得し、第1信号を用いてアークタンジェント演算を行い下位信号を取得し、上位信号、中位信号、及び、下位信号に基づいて被計測物の絶対位置を算出する。
(もっと読む)
アブソリュートエンコーダ及び撮像装置
【課題】本発明は、計測位置に応じて異なる検出精度を有する小型で安価なアブソリュートエンコーダを提供する。
【解決手段】被計測物の絶対位置を検出するアブソリュートエンコーダであって、前記被計測物とともに移動可能に構成され、第1スリットを有する第1トラック及び第2スリットを有する第2トラックを備えたスケール部と、前記第1スリットから得られた第1信号を検出する第1検出手段と、前記第2スリットから得られた第2信号を検出する第2検出手段と、前記第1信号及び前記第2信号を用いてバーニア演算を行う演算手段とを有し、前記第2スリットの間隔は、前記スケール部の移動方向における位置に応じて異なる。
(もっと読む)
ロータリーエンコーダ
【課題】高精度で、小型かつローコストなロータリーエンコーダを提供する。
【解決手段】ロータリーエンコーダ100は、螺旋状パターン501及び放射状パターン502を有して回転軸を中心に回転可能なスケール201と、螺旋状パターン501を透過した光束を検出して第1検出信号を出力する第1センサユニット301と、放射状パターン502を透過した光束を検出して第2検出信号を出力する第2センサユニット302と、第1検出信号に基づいて偏芯補正信号を生成し、偏芯補正信号に基づいて第2検出信号を補正する信号処理回路401とを有し、螺旋状パターン501は、所定値より大きい回転角変位を検出し、放射状パターン502は、螺旋状パターン501で検出される回転角変位よりも小さい回転角変位を検出する。
(もっと読む)
エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法
【課題】回折干渉光を利用して分解能を向上させつつ、製造等を容易にすることが可能な、エンコーダ、サーボモータ、サーボユニット及びエンコーダの製造方法を提供する。
【解決手段】
回転格子が形成されたリング状の第1トラックTA及び第2トラックTBを有するディスク110と、第1トラック及び第2トラックに対向して固定配置され、固定格子を有して回折干渉光を検出する第1検出部130A及び第2検出部130Bと、を有し、第1トラックの複数のスリットは、湾曲スリットとして形成され、第1トラックに対向する第1検出部は、第2検出部が対向する位置におけるスリットの接線LINEBに対して、第1トラックの回折格子に含まれるスリットの接線LINEAが平行となる位置に配置される。
(もっと読む)
直動回転エンコーダ、直動回転モータ及び直動回転モータシステム
【課題】検出対象の回転位置及び直線位置が測定可能な、且、小型化及び製造コスト削減が可能な、直動回転エンコーダ、直動回転モータ及び直動回転モータシステムを提供すること。
【解決手段】この直動回転エンコーダ100は、駆動軸AX周りに回転可能で且、直線移動可能な検出対象21の回転及び直線移動に追従可能な直動回転部110と、直動回転部の表面111に設けた、駆動軸までの距離が一定でありかつ駆動軸方向の位置が直動回転部の1回転内で1周期以上変化する形状を有するリング状のトラックTと、トラックに対向してそれぞれ固定配置され、トラックまでの駆動軸に沿った距離L1〜L4に応じた検出信号G1〜G4を検出する検出部S1〜S4と、検出信号に基づいて、検出対象の駆動軸方向の直線位置及び駆動軸周りの回転位置を特定する位置特定部120と、を備える。
(もっと読む)
表面測定測定機のための測定方法
検出システム、制御システム、画像形成システム及び制御方法
【課題】高精度な位置制御及び速度制御を実現可能とする。
【解決手段】エンコーダ装置40から出力される正弦波のアナログA相及びB相信号を、信号処理回路50で次のように変換する。即ち、信号処理回路50では、アナログA相及びB相信号をディジタル化して無逓倍のディジタルA相及びB相信号を生成すると共に、アナログA相及びB相信号を4倍に逓倍且つディジタル化して、ディジタル逓倍A相信号及びディジタル逓倍B相信号を生成する。更には、ディジタルA相及びB相信号の排他的論理和(XOR)信号を、ディジタルZ相信号として生成する。位置検出部61は、ディジタル逓倍A相信号及びディジタル逓倍B相信号に基づき、対象物の位置を検出する。一方、速度検出部631,632,633は、ディジタルA相信号、又は、ディジタルZ相信号、又は、ディジタルA相及びB相信号の両者に基づき、対象物の速度を検出する。
(もっと読む)
反射型光学式エンコーダ
【課題】従来に比べて、受光部における反射光の利用効率が向上可能な反射型の光学式エンコーダを提供する。
【解決手段】光源101と、反射スケール130と、光検出部160と、演算部170とを備え、反射スケールにおける第1反射部111,121からの反射光を、光検出部の第1受光部141,151にて受光し、第1反射部と異なる傾斜をつけた第2反射部112,122からの反射光を第2受光部142,152にて受光し、演算部はその2つの出力を元に演算する。
(もっと読む)
エンコーダ
【課題】相対的に移動する部材間で効率よく電力供給を行うことが可能なエンコーダを提供する。
【解決手段】パターン部(5)を有し、所定方向に移動する移動体(1)と、パターン部に光(L)を照射する発光部(3)と、パターン部を介した光を検出する光検出部(11)と、移動体に設けられ、発光部に電気的に接続されたコイル部(6)と、エンコーダ本体(10)又は測定対象(M)に設けられ、コイル部を貫く磁束を発生させる磁石部(7)と、を備えることを特徴とする。
(もっと読む)
エンコーダ
【課題】供給電力を削減することができるエンコーダを提供する。
【解決手段】磁場(B)を発生する磁石部(2)を有し、所定方向に移動する移動体(1)と、移動体に設けられたパターン部(3)と、パターン部に光を照射する発光部(11a)と、エンコーダ本体(10)に設けられ、パターン部を介した光を検出する光検出部(11b)と、エンコーダ本体に設けられ、発光部と電気的に接続され磁場の磁束が貫通するコイル部(13)と、を備えることを特徴とする。
(もっと読む)
1 - 20 / 59
[ Back to top ]