
Fターム[2F103ED37]の内容
Fターム[2F103ED37]の下位に属するFターム
Fターム[2F103ED37]に分類される特許
1 - 20 / 42
変位検出装置、変位検出方法及び変位検出プログラム
【課題】安価に光学系の歪みをキャンセルしてスケールの位置情報の検出精度を向上させる。
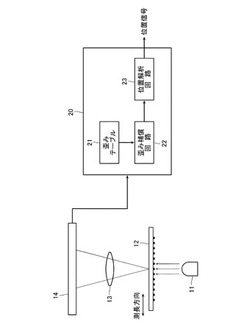
【解決手段】光電式エンコーダは、発光素子11と、スケール12と、レンズ13と、PDA14と、信号処理演算回路20とを備える。信号処理演算回路20は、歪みテーブル21と、歪み補償回路22と、信号解析回路23とを備える。歪みテーブル21は、例えば予めレンズ13等の光学系の設計値から歪みシミュレーションによって得られた歪み情報Δeiに基づき算出されている。歪み補償回路22は、歪みテーブル21を参照すると共に、PDA14の各PD41の位置情報に基づいて、各PD41の位置xiを仮想的にxi−Δeiの位置に配置変更して光学系の歪みを除去し、PDA14からの明暗信号を補正する。位置解析回路23は、この補正された明暗信号に基づいて、スケール12の位置を解析する。
(もっと読む)
エンコーダ装置、及び装置

【課題】基準位置を高精度に検出する。
【解決手段】エンコーダ装置は、基準位置を示す基準位置パターンと位置情報パターンとを有するスケールと、スケールに光を照射する光源と、光を変調させる変調信号を生成する変調部と、変調信号に基づいて変調された変調光によって位置情報パターンを検出した位置情報信号に基づいて、スケールの位置情報を検出する位置情報検出部と、変調光によって基準位置パターンを検出した検出信号を出力する基準位置受光部と、検出信号に基づいて、基準位置を検出する基準位置検出部と、を備え、基準位置検出部は、光を変調することによって生じる基準位置の変位を補正する補正部を備える。
(もっと読む)
エンコーダ
【課題】安定して高調波歪を抑え、位置を高精度に検出することが可能なエンコーダを提供すること
【解決手段】光源12と、受光素子17と、前記光源からの光を反射または透過することによって前記受光素子に導くパターン24Aを含む複数の単位ブロックパターンKAを含むスケール20と、を備えるエンコーダを提供する。複数の単位ブロックパターンは、X方向に沿って、ピッチPの周期で配置されており、パターンは、中心線Xcに関して対称な形状であり、各単位ブロックパターンはY方向に複数の分割領域を含み、パターンの面積比は隣接する二つの分割領域の間で異なり、各分割領域において、前記パターンは、前記測位方向に延びる2つの平行な直線と前記測位方向に垂直な方向に延びる2つの平行な直線によって規定される矩形形状を有する。
(もっと読む)
エンコーダ
【課題】小型かつ高精度な位置検出が可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターン列はX方向に垂直なY方向に周期的に配列され、X方向にそれぞれ異なるピッチを有する複数の領域23A、25Aを有し、領域25Aのエネルギー分布の振幅がスケールのX方向の位置に従って変化するように構成されている。エンコーダは、受光素子アレイ16Aの出力信号からそれぞれ対応する領域の振幅を取得する第1、第2の振幅取得手段37、38と、第1、第2の振幅取得手段37、38が取得した複数の領域の2つの振幅の比で表される振幅信号S_ampをスケールの絶対位置を表す絶対位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
エンコーダ
【課題】高精度なスケールの位置検出をすること
【解決手段】エンコーダにおいて、パターン列は、移動方向であるX方向に垂直なY方向に周期的に配列されたX方向に第1の変調周期P1と第2の変調周期P2を有する。信号処理手段30は、受光素子アレイの出力からピッチP1の位相を取得する第1の位相取得手段32を有する。エンコーダは、領域23を検出する複数の受光素子17Aの出力信号に対して受光素子アレイ上の位置に応じた重みを使用して重み付けをし、重みは、第1の位相取得手段の空間周波数応答のピッチP2に対応する空間周波数を含む所定の範囲において、重み付け有の値が重み付け無の値以下となるように設定されている。
(もっと読む)
アブソリュートロータリーエンコーダ
【課題】精度の点で有利なアブソリュートロータリーエンコーダを提供する。
【解決手段】第1軸の周りに一定の周期で複数のマークが配列され第2軸を回転中心として回転するスケールと、前記周期よりも小さいピッチで配置された複数の光電変換素子によって複数のマークの中の一部のマークを検出する第1検出器及び第2検出器のそれぞれから出力される周期信号に基づいて第1検出器の位置におけるスケールの絶対回転角度を算出する算出部と、を備える。前記算出部は、第1検出器から出力された周期信号の振幅を量子化することによってデータ列を生成し、該データ列を第1角度データに変換し、第1検出器及び第2検出器から出力された周期信号の振幅をそれぞれ規格化し、該振幅が規格化された周期信号を平均化し、該平均化された周期信号の位相から第1角度データよりも最小単位が小さい第2角度データを算出し、第1角度データと第2角度データとを合成する。
(もっと読む)
エンコーダ
【課題】スケール上に汚れ等がある場合、およびスケール上のパターンが統合パターンのような場合においても、検出精度の低下を抑制するとともに検出ヘッドをコンパクトに維持でき当該エンコーダが装着される制御機械のエラー止まりを少なくすることが可能となる。
【解決手段】検出ヘッド120は相対変位可能な方向に並ぶ複数の受光アレイ部PDi(i=1〜4)を備え、受光アレイ部PDiから出力される出力信号で検出ヘッド120の位置xを示す位置信号xiがそれぞれ算出され、複数の位置信号xiを合成しスケール110に対する検出ヘッド120の位置xを決定するのに、受光アレイ部PDi毎の位置信号xiに出力信号の大きさに従う重みづけ(信頼性係数Ri)がそれぞれ行われ、重みづけされた位置信号xiの平均が取られる。
(もっと読む)
ノイズレベル検出機能付きエンコーダ
【課題】従来のエンコーダにおいては、検出信号からノイズを分離し、更にそのノイズを測定するための専用回路が必要となり、回路面積並びにコストが不利となる。
【解決手段】本発明のノイズレベル検出機能付きエンコーダ1は、電動機により駆動される被駆動体の位置データを得るためのノイズレベル検出機能付きエンコーダ1であって、被駆動体の移動状態に対応して、周期的に発生する90度位相の異なる2相の正弦波状のアナログ信号からなる検出信号を出力する検出手段3と、検出信号を一定の時間間隔でディジタル値に変換し、出力データとして出力するADコンバータ5と、出力データの時間的変化に基づいて変動成分を算出し、変動成分をノイズレベルとして出力するノイズレベル検出部8と、を有することを特徴とする。
(もっと読む)
内挿誤差測定装置、内挿誤差測定方法、エンコーダおよび位置検出方法
【課題】位置情報の検出精度を高めることができる。
【解決手段】所定の固有周波数で振動する振動子(40)と、前記振動子に設けられ、位置を示す符号が付されている符号板(10)と、前記符号が示す位置を位置情報として検出して、前記位置情報を含む検出信号を出力する検出部(30)と、前記検出部から出力された検出信号と前記固有周波数に対応する周波数成分とに基づいて、前記位置情報の内挿誤差を計測する計測部(60)とを備える。
(もっと読む)
光学式絶対位置測長型エンコーダ
【課題】アブソリュート(ABS)パターンの検出精度の向上と、スケール上のゴミなどによるノイズの影響の低減を図る。
【解決手段】相対移動可能な検出器とスケール12を備え、検出器側には絶対位置検出用の発光素子11、光学系(レンズ13)及び受光素子(フォトダイオードアレイ14)を配置し、スケール側には所定のアブソリュートパターン32を配置した光学式絶対位置測長型エンコーダにおいて、前記アブソリュートパターン32を、測長方向に分割したり、前記アブソリュートパターンの一部のエッジ位置を測長方向に変更する。
(もっと読む)
エンコーダ
【課題】エンコーダに搭載されるイメージセンサのフレームレートを向上させること。
【解決手段】移動可能に設けられ、第1の符号と第2の符号とを含むパターンを有し、光源から射出される光が入射するスケール(15)と、スケールが移動する行方向に隣接する少なくとも2以上の光電変換素子からなる光電変換素子群を複数有する光電変換素素子部(17)とを備え、複数の光電変換素子群は、行方向に沿って配置され、光電変換部は、スケールを介した光に基づく複数の光電変換素子群からそれぞれ出力される出力信号を選択的に用いてパターン信号を生成する。
(もっと読む)
光学式基準位置検出型エンコーダ
【課題】電源を投入しただけで、スケールと検出器を相対移動させることなく、静止した状態で原点等の基準位置を検出可能とする。
【解決手段】相対移動可能な検出器とスケール12を備え、検出器側には基準位置検出用の発光素子11、光学系13及び受光素子14を配置し、スケール側には所定の位置基準パターン33、33´、33″を配置した光学式基準位置検出型エンコーダにおいて、前記受光素子を測長方向に伸びるアレイ状とし、該アレイ状受光素子(位置基準フォトダイオードアレイ43)の出力を電気的に掃引して設計値との相関をとることで、スケールと検出器を相対移動させることなく、静止した状態で基準位置を検出可能とする。
(もっと読む)
干渉型光ファイバーセンサーシステムおよび演算器
【課題】ダイナミックレンジの広い演算器が不要な干渉型光ファイバーセンサーシステムを提供する。
【解決手段】物理量を検知するセンシングファイバー11aおよびリファレンスファイバーを有する干渉計と、前記物理量の測定信号3を含む干渉光32aを、電気信号に変換するO/E変換器33と、前記電気信号から、正弦波成分および余弦波成分を抽出するAM復調器51a、51bと、該正弦波成分および該余弦波成分を用いて逆正接演算を行い、前記測定信号を含む信号を出力する逆正接演算器53と、前記逆正接演算器から出力された信号の所定時間毎の差分を算出し、該差分信号を出力する差分器61と、を備える。
(もっと読む)
光電式エンコーダ
【課題】簡単な計算で、スケールの汚れや格子の欠陥により発生する位置検出誤差を低減する。
【解決手段】所定周期の格子12が形成されたスケール13と、該スケール13に対して相対変位可能であると共に光源14及び受光器30を備えた検出ヘッド20と、を備えた光電式エンコーダにおいて、前記受光器30の受光素子34がN相(Nは3以上の整数)の明暗信号を出力するようにされると共に、該N相明暗信号をそれぞれデジタル化したN相のデジタル信号に、周期固定の正弦波関数を最小2乗法によりフィッティングして、前記N相明暗信号の位相を検出する際に、該N相明暗信号の周期Pが前記N相デジタル信号のデータ点間隔wの整数倍になり、受光素子全長Mが該N相明暗信号の周期Pの整数倍になるようにする。
(もっと読む)
エンコーダ
【課題】絶対位置を検出する処理を省電力化するエンコーダを提供する。
【解決手段】符号板(10)の移動方向に形成され、最低識別幅λのパターン幅を有し、絶対位置を識別するN(Nは自然数)次のアブソリュートパターン(11)と、アブソリュートパターン(11)のうち移動方向に連続する(N+1)個以上の連続パターンによって示される範囲を第1の検出領域と定め、第1の検出領域を検出可能な検出部と、を備え、検出部は、符号板(10)の移動に応じて、第1の検出領域から選択された選択パターンによって示される第2の検出領域を検出する。
(もっと読む)
高解像度の光学エンコーダ・システム、装置及び方法
【課題】対ノイズ性が改良され、高い補間係数を提供することができ、高精度の補間出力信号を生じることができ、かつ回路の複雑性、設計及び/又は費用を過度に増加させることがないモーション・コード化システムに対する補間回路を提供する。
【解決手段】光学エンコーダ10に関連して使用するための、フロント・エンドのアナログ回路110の種々の実施形態が開示される。回路を補間するために増分又は絶対モーション・エンコーダの中のフロント・エンドのアナログ回路110によって、高精度のアナログ出力信号が提供される。これにより、高いタイミング精度を有する高い補間係数の出力信号を提供することができる。開示された補間回路は、必要以上に努力することなくCMOS又はBiCMOS工程を用いて実現することができる。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】エンコーダタイプの位置測定システムのグリッドプレート内の欠陥を判定する。
【解決手段】別のオブジェクトに対する可動オブジェクトの位置を測定するエンコーダタイプの位置測定システムを提供するステップであって、前記エンコーダタイプの位置測定システムが、グリッドプレートとエンコーダヘッドとを含むステップと、2つ以上の検出器の各々に反射した光の量を測定するステップと、2つ以上の検出器に反射した放射ビームの結合放射ビーム強度を用いて測定位置でのグリッドプレートの反射率を表す反射率信号を決定するステップと、グリッドプレートの反射率信号に基づいて測定位置の欠陥の存在を判定するステップとを含む方法を提供する。
(もっと読む)
回転検出装置及びサーボライタ
【課題】回転体の回転開始直後から該回転体の回転を検出することができる回転検出装置、及び該回転検出装置を備え磁気テープに精度良くサーボ信号を書き込むことができるサーボライタを得る。
【解決手段】ロータリエンコーダ10は、回転軸線に対し同軸的な円周に沿ってランド22Bと光の反射状態の異なるピット22Aが等間隔で配置されて光学パターン22が形成された光学ディスク14と、光学パターン22からの反射光の強度に応じた回転検出信号を出力する回転検出部16と、回転検出部16からの回転検出信号d4が検出されない場合に、該回転検出信号d4が検出されるまで光ピックアップ24を光学ディスク14の径方向に所定範囲内で変位させる径方向粗動機構56と、を備えている。
(もっと読む)
エンコーダ・ホーム位置信号を処理する方法及びシステム、並びに、コンピュータ使用可能媒体
【課題】エンコーダ・ホーム位置信号を処理する改良された方法を提供する。
【解決手段】本発明の方法では、回転軸に対して垂直に回転するコードホイール表面を有するコードホイールと関連付けられたエンコーダ・ディスクの複数のバーの幅を調節することによって絶対ホーム・マグニチュード信号を生成し、この絶対ホーム・マグニチュード信号をサンプリングすることによって変化率信号を生成し、この変化率信号をフィルタリングすることによって信号対ノイズ比を高め、ホーム位置アルゴリズムを適用することによってこの変化率信号のホーム位置を決定する。この変化率信号の特徴的形態は、変化率信号と関連付けられたホーム位置のロバスト性を高めて、エンコーダ・ホーム位置信号を効率的に処理することによって、レンダリング装置の有効性を高める。
(もっと読む)
絶対位置測長型エンコーダ
【課題】ABSパターンの最小線幅がABS受光素子アレイのアレイ間隔の整数倍となっていない場合でも、相関演算を行うことができ、高精度に移動距離を計測可能とする。
【解決手段】擬似ランダム符号に基づくABSパターン104が設けられたスケール102と、該スケール102により形成された明暗パターンを受光する受光素子112と、該受光素子112の出力に従う信号を処理して該受光素子112に対するスケール102の絶対位置を計測する信号処理回路118と、を有する絶対位置測長型エンコーダ100において、前記信号処理回路118が、前記受光素子112のABS受光素子アレイ114のアレイ間隔PPDAよりも細かい間隔Dを求めると共に、前記ABS受光素子アレイ114の出力に従う該間隔D毎のデジタル値を求めて出力する空間分割数変換回路124を備える。
(もっと読む)
1 - 20 / 42
[ Back to top ]