
Fターム[2F112AB10]の内容
Fターム[2F112AB10]に分類される特許
1 - 20 / 24
3次元シーンの要素の奥行きを評価する装置
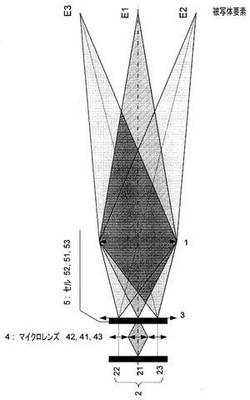
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
画像処理装置および方法、ならびに移動体衝突防止装置

【課題】近距離範囲で物体を正確に認識できる画像処理装置および方法、ならびに移動体衝突防止装置を提供。
【解決手段】画像処理装置は、撮像部、および撮像部が撮像した画像を処理する画像処理部を備え、撮像部は、撮像レンズ、撮像レンズを駆動しフォーカシング距離を変更する合焦機構、および撮像素子を有する。合焦機構は、撮像レンズを駆動して撮像レンズの光軸方向における異なる位置の物体を撮像素子に鮮明に結像させるように順次フォーカシング距離を変更するフォーカススイープを行う。撮像部は、フォーカススイープにおいて複数の異なるフォーカシング距離に応じてそれぞれの画像を撮像する。画像処理部は、この撮像された複数枚の画像から、各画像において鮮明に結像された物体を認識し、それぞれの画像の撮像時のフォーカシング距離に対応してこの認識された物体の位置を表示する物体分布画像を生成する。
(もっと読む)
撮影システムおよびレンズ装置
【課題】 複数の被写体に対してフォーカシングを行うことなく、複数の被写体のある基準位置からの距離を精度よく、かつ連続的に算出することができるようにした撮影システムおよびレンズ装置を提供する。
【解決手段】 撮影システムは、レンズ装置1と、該レンズ装置1を用いて撮影を行うカメラ2とを含む撮影システムであって、被写体像間の位相差を検出する位相差センサーが構成された焦点検出部102を有し、複数の測距エリアをもって多点測距可能な位相差方式のオートフォーカスレンズにおいて、各測距点ごとの被写体距離、および被写体間距離を生成する距離情報生成手段と、ある基準位置からの距離情報を認識する距離情報認識手段と、前記距離情報から各被写体の前記基準位置からの距離を算出する被写体距離演算手段と、撮影システムの移動速度を算出する移動速度算出手段と、算出された距離情報を記憶、更新する記憶更新手段と、記憶、更新された距離情報を出力する距離情報出力手段を有する。
(もっと読む)
距離情報取得装置および撮像装置
【課題】構造化開口の一定の形状に固定されていると、シーンに対する最適ピント位置、測定可能な奥行き範囲なども固定されてしまう。
【解決手段】距離情報取得装置は、入射する被写体光束を複数の波長帯に分離して検出する受光素子と、被写体光束を受光素子に導く光学系と、複数の波長帯のうちの一つに含まれる第1波長帯を透過する第1フィルタ領域と、複数の波長帯のうちの一つに含まれ、第1波長帯とは異なる第2波長帯を透過する第2フィルタ領域を、光学系の光軸に対してそれぞれ偏心した位置に有する構造化開口と、第1フィルタ領域および第2フィルタ領域のそれぞれにおいて、被写体光束が透過する領域の重心を変位させる重心変位機構とを有する。
(もっと読む)
空間光パターンに基づく深さデータの生成
空間光パターンに基づいて深さデータを生成するための技術について一般に説明される。いくつかの例では、深さデータを生成する方法が、空間光パターンが投射される1つまたは複数の物体の画像を取得することであって、画像内の空間光パターンのぼやけが深さ方向に単調に増加または減少する、取得することと、対象画素周りの局所画像領域にある画像の空間周波数成分値を算出することと、深さと空間周波数成分値との事前に設定した関係を用いて、算出した空間周波数成分値に対応する深さデータを求めることとを含む。 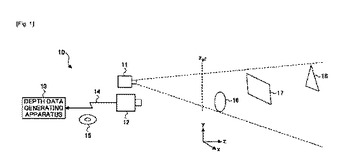 (もっと読む)
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 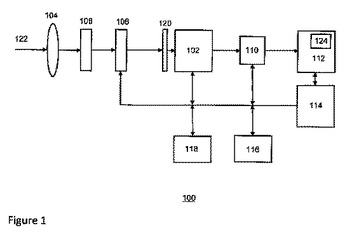 (もっと読む)
(もっと読む)
口腔内測定装置及び口腔内測定システム
【課題】装置のサイズを大きくすることなく、口腔内を高精度に測定することを可能にする口腔内測定装置及び口腔内測定システムを提供する。
【解決手段】口腔内の少なくとも歯を含む被測定物に光を照射する投光部と、前記被測定物で反射された光を集光させるレンズ系部と、前記レンズ系部が集光した光の焦点位置を変化させる焦点位置可変機構と、前記レンズ系部を通過した光を撮像する撮像部と、を備える。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】 撮像画像で焦点検出エリアに対応しない各々の部分についても、それぞれ被写体距離の情報を取得するための手段を提供する。
【解決手段】 画像処理装置の画像取得部は、撮像条件を変化させて共通の被写体を撮像した複数の撮像画像を取得する。画像選択部は、基準画像と、該基準画像と異なる1以上の参照画像とを選択する。合焦度算出部は、基準画像および参照画像を対象として、画像の合焦度を示す合焦評価値を、対象の各画像内における複数の領域毎に求める。距離推測部は、基準画像から求まる複数の第1合焦評価値と、参照画像から求まる複数の第2合焦評価値との間の変化量と、撮像条件情報とに応じて、基準画像の各領域に対応する被写体距離を推測する。
(もっと読む)
形状測定装置
【課題】対物レンズの光軸に沿って、被検物を移動させることなく、被検物の形状を測定できるようにする。
【解決手段】MLA12は、対物レンズ11の瞳面又は結像面に配置され、撮像素子13は、MLA12の背後に設置され、対物レンズ11による被検物像を撮像する。レンズ駆動装置42は、被検物の各測定点までの距離情報に応じた量だけ、対物レンズ11を光軸方向に移動させて、被検物に焦点が合うようにする。演算処理回路34は、撮像素子13の出力から複数の測定画像を生成し、MLA12の2次元状に配列された複数のMLの各々に対応する撮像素子13の撮像領域を構成する画素のうち、対物レンズ11の主光線と交わる位置にある画素から得られる基準画像を、測定画像の補正情報として用いて、被検物の3次元の形状を測定する。本発明は、被検物の3次元の形状を計測する形状測定装置に適用できる。
(もっと読む)
形状測定装置
【課題】対物レンズの光軸に沿って、被検物を移動することなく、被検物の形状を測定できるようにする。
【解決手段】MLA12は、対物レンズ11の瞳面又は結像面に配置され、撮像素子13は、MLA12の背後に設置され、被検物像を撮像する。ズーム用レンズ駆動装置51は、ズーム用レンズZLの移動によって被検物の像の大きさを拡大又は縮小し、合焦レンズ駆動装置52は、合焦レンズFoLの移動によって被検物に焦点を合わせる。演算処理回路34は、撮像素子13の出力から複数の測定画像を生成し、MLA12に配列された複数のMLの各々に対応する撮像素子13の撮像領域を構成する画素のうち、対物レンズ11の主光線と交わる位置にある画素から得られる基準画像を補正情報として用いて、被検物の形状を測定する。本発明は、被検物の3次元の形状を計測する形状測定装置に適用できる。
(もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の情報測定装置を提供する。
【解決手段】画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像センサカメラ1は、メインレンズ11と、シャッター12と、マイクロレンズアレイ13と、撮像セルアレイ14とを含む。シャッター12の開口パターンは複数あり、各パターンにおいて、シャッター12の各開口部を通過する光は、撮像セルアレイ14の互いに異なる領域に入射する。
(もっと読む)
距離測定装置および距離測定方法
【課題】精度よく距離情報を測定できる小型かつ低コストの距離測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cと、マスク部4dとからなる。マスク部4dは、画像センサカメラ1内部のマイクロレンズアレイ12の非レンズ部に対応する画素の値を所定の値に変換する。
(もっと読む)
距離測定装置および距離測定方法
【課題】奥行き分解能の高い距離測定装置あるいは距離測定方法を提供する。
【解決手段】本発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成画像を生成する再構成部4aと、複数の再構成画像の各々を複数の領域に分割し、各領域について、領域に含まれる画素の輝度の大きさを代表する第1の代表値を算出し、第1の代表値に基づいて画素群内の輝度分布の偏りの大きさを表わす第2の代表値を算出する輝度情報算出部4bと、第2の代表値に基づいて対象物までの距離を算出する距離情報算出部4cとからなる。
(もっと読む)
光学式三次元測定および色測定の装置および方法
本発明は光学式三次元測定および色測定のための装置および方法に関し、この装置は、多色共焦点測定方式、三角測量測定方式または他の測定方式による光学式三次元測定のための第1のモードと、色測定のための第2のモードとの間で調整可能であり、第1のモードにおいて広帯域の照明光線が測定対象物表面の第1の平面に集束し、第2のモードにおいて広帯域の照明光線が、測定対象物の表面から一定の間隔dをおいて第1の平面の外部にある第2の平面に集束する。 (もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の情報測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cと、領域選択部4dとからなる。
(もっと読む)
距離情報検出装置
【課題】1回の撮像で画像データ内の対象物の距離情報を算出することが可能な距離情報検出装置を提供する。
【解決手段】距離情報検出装置20Aは、対象物PXからの光を集光する撮像レンズ11と、撮像レンズ11からの光を受けるマイクロレンズアレイ12と、マイクロレンズアレイ12を介して対象物PXを撮像する撮像素子13とを含む画像センサカメラ1と、画像処理部4Aとを備える。画像処理部4Aは、撮像素子13で撮像された画像のエッジ部分を検出するエッジ検出部41Aと、検出された画像のエッジ部分の撮像素子13上の画素値の分布状態を検出する分布状態検出部42Aと、検出された分布状態に基づいてエッジ部分の撮像素子13からの距離情報を検出する距離検出部43Aとを含む。
(もっと読む)
自律車両ナビゲーションのための三次元障害物マップ作成の方法及びシステム
【課題】自律車両のナビゲーション中の障害物を避けるために、3次元(3D)障害物マップを作成する。
【解決手段】画像取り込み装置を自律車両に提供し、画像取得装置を、所定数の異なる指定距離にフォーカスして、指定距離それぞれにおける画像を取得する。そして、取得された画像それぞれに関してどの領域にピント合わせされているかを識別し、対応するレンズフォーカス距離を、ピント合わせされている領域それぞれに割り当てる。その後、取得した画像それぞれに基づいて合成画像を形成する。領域それぞれには、対応するレンズフォーカス距離がラベル付けされる。その後、合成画像から三次元障害物マップが生成される。この障害物マップはx、y、z座標系を有し、x及びyはピクセル水平位置及び垂直位置に比例し、zはレンズフォーカス距離である。
(もっと読む)
赤外顕微鏡
【課題】試料測定領域の各点で良好にフォーカスの合ったマッピング測定を行うことのできる赤外顕微鏡を提供すること。
【解決手段】赤外顕微鏡10は、測定領域からの光を集光する顕微手段18と、測定領域の画像を取得する可視画像検出手段24と、試料を載置するステージ26と、顕微手段18とステージ26との距離を変更する駆動手段28と、駆動手段28を制御して顕微手段28とステージ26との距離を変更し、異なる複数の距離で測定領域の可視画像を取得する合焦データ取得手段34と、複数の距離で取得した可視画像の情報から、各測定点における合焦距離を演算する合焦距離演算手段38と、を備える。そして、赤外顕微鏡10は各測定点の合焦距離に基いてマッピング測定を行う。
(もっと読む)
傾斜焦点試験を行う方法及び露光装置、並びにそれに応じて製造されたデバイス
【課題】傾斜焦点試験を行う方法及び露光装置、及びそれに応じて製造されたデバイスを提供すること。
【解決手段】本発明は、
・ 少なくとも1つの反射デバイスを第2の向きに傾斜させるために傾斜用デバイスを使用して、前記第1の投影ビームに対して傾斜を有する第2の投影ビームを供給するステップと、
・ 第2の投影された投影放射ビームを目標物体に生じさせるステップと、
・ 第1及び第2の投影された投影ビームの目標物体上での横方向シフトを決定し、且つ投影された投影ビームに対する目標物体のデフォーカスを前記横方向シフトから決定するステップと、を備える傾斜焦点試験を行う方法に関する。
(もっと読む)
物体検出装置
【課題】複雑な構成を用いることなく、簡易な構成で被写体の位置を複数箇所検出することができる物体検出装置を提供する。
【解決手段】絞り1と、互いに焦点距離の異なる複数の領域を有する複合レンズ2と、複数の領域から所望の焦点距離に対応する領域を選択するとともに、絞り1の開口度を調節する絞り制御部4と、複合レンズ2および絞り1を通して被写体を撮影する撮影部3と、絞り制御部4により絞り1の開口度および所望の焦点距離に対応する領域の少なくともいずれかを異ならせて撮影部3で撮影した被写体の複数の画像同士の合焦状態を比較することによって、被写体の位置を検出する被写体位置検出部11とを備えた。
(もっと読む)
1 - 20 / 24
[ Back to top ]