
Fターム[2F112FA36]の内容
光学的距離測定 (16,745) | データ処理回路 (4,598) | 画像処理(2次元的イメージ処理) (952) | ウインドウ発生 (100)
Fターム[2F112FA36]に分類される特許
1 - 20 / 100
画像処理装置及び画像処理方法
【課題】対象物体までの距離を測定する際に、距離精度を向上させ、従来より遠い距離の対象物でも正確な距離を測定することができる画像処理装置及び画像処理方法を得ること。
【解決手段】一対の撮像素子で同時刻に同方向を撮像した一対の画像の一方の画像から対象物の画像を含む一方画像対象物領域302を抽出する。そして、一方画像対象物領域302を構成する複数の画像構成部分についてそれぞれ対象物画像構成部分304と背景画像構成部分303のいずれであるかの確度である背景度を算出する。そして、背景度を用いて他方の画像501内から一方画像対象物領域302と類似した画像を有する他方画像対象物領域503を抽出して、一方画像対象物領域302と他方画像対象物領域503との視差を算出する。
(もっと読む)
物体検出装置を搭載する移動体

【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】多眼方式の撮像装置で取得された画像群から、主被写体と背景を含む距離画像を提供する。
【解決手段】本発明に係る画像処理装置は、合焦位置が異なる複数の光学系を有する多眼方式の撮像装置によって撮像された複数の画像を取得する画像取得部(401)と、撮像装置によって撮像された複数の画像それぞれについて合焦画像となる領域を選択する合焦画像選択部(404)と、合焦画像選択部で選択された複数の合焦画像を使用して距離を算出する距離算出部(405)と、を備えたことを特徴とする。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
測距方法及び到達時間算出方法
【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
(もっと読む)
ステレオ画像処理装置及びステレオ画像処理方法
【課題】テクスチャの弱い領域を有する画像であっても、画像の対応付けに際しミスマッチングを軽減して高精度の視差検出を行うことができるステレオ画像処理装置、方法を提供する。
【解決手段】第一の画像と第二の画像が入力されると、第一の画像の第一の画素データを相互に異なる位置に含む複数の第一のウィンドウの各々について、当該第一ウィンドウと、指定された視差データに対応した前記第二の画像の第二のウィンドウとの間の非類似性に応じた評価値であるウィンドウコストを生成する。次に、第一のウィンドウのウィンドウコストに、第一の画素データに隣接する三以上の画素データのウィンドウコストを累積加算した累積加算コストを集計した修正コストを計算し、計算した修正コストに基づいて第一の画像の画素データそれぞれの対応点を第二の画像において求め、視差データを出力する。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
画像処理装置およびプログラム
【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
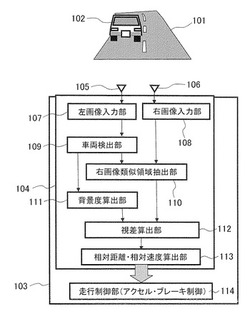
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
焦点調節装置、焦点調節方法、撮影装置及び焦点調節プログラム
【課題】ユーザが所望する被写体に焦点を合わせる焦点調節装置、焦点調節方法及び焦点調節プログラムを提供する。
【解決手段】複数の視点の画像に基づく視差マップを生成する視差マップ生成部122と、前記視差マップから視差毎の頻度を算出し、前記頻度が第N番目(Nは自然数)に高い視差に基づき穂車体の距離を算出する被写体距離算出部181と、前記距離からの光線の焦点が撮像素子106,116に合う合焦位置に撮影レンズの位置を調節するフォーカス制御部125とを備える。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を高速化すること。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段により撮像されたそれぞれの画像を複数の小画像に分割する分割手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像の小画像に対し、視差算出画素を選択するためのテクスチャ検出処理、選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する視差算出処理を少なくとも行う視差算出手段と、視差算出手段によるテクスチャ検出処理、視差算出処理を小画像毎に並列して処理するよう制御する制御手段と、を備える。
(もっと読む)
測距装置及び撮像装置
【課題】視差算出にかかる処理時間を考慮して視差算出に用いる画素を適切に選択する。
【解決手段】対象物までの距離を測定する測距装置であって、2つの撮像手段と、2つの撮像手段のうち一方の撮像手段により撮像された画像に対し、視差算出の対象画像のサイズに応じて、視差算出画素を選択するための複数の処理から1つを決定する決定手段と、決定手段により決定された処理に基づき、対象画像から視差算出画素を選択する選択手段と、選択手段により選択された視差算出画素と、他の撮像手段により撮像された画像のうち、選択された視差算出画素に対応する画素とを用いて視差データを算出する算出手段と、を備える。
(もっと読む)
ステレオ画像処理方法およびステレオ画像処理装置
【課題】 対象物と撮像装置との距離に応じて、高精度、高速に対象物の3次元情報を取得する。
【解決手段】 対象物を撮像する撮像装置と、同一の対象物を複数の方向から撮像した複数の高解像度画像を取得する画像取得部と、低解像度画像を生成する低解像度画像生成部と、基準画像上の点に対応する比較画像上の対応点を探索する対応点探索部と、対応点の探索結果に基づいて3次元情報を演算する3次元情報演算部と、低解像度画像に基づく3次元情報から高解像度画像における探索点の距離範囲を決定する距離範囲決定部と、距離範囲に基づいて高解像度画像における探索ウィンドウサイズを決定するウィンドウサイズ決定部と、距離範囲により定まる視差範囲に基づいて高解像度画像における前記対応点の探索範囲を限定する探索範囲限定部と、を備える。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
対応点探索装置
【課題】ステレオカメラを用いて得られた2つの画像についての対応点探索処理において、遠近競合を抑制した対応点探索装置を提供する。
【解決手段】ステレオカメラSCで得られた画像データが入力される画像入力部11と、画像入力部11から出力される画像データに対して、解像度変換を行う解像度変換部12と、解像度変換された画像データに対して対応点探索を行うためのポイント設定を行うポイント設定部13と、ポイント設定された画像データに対して多重解像度処理のための視差を設定するための視差設定部14と、ポイント設定された画像データに対して、ウインドウを設定するウインドウ設定部15と、ウインドウが設定された画像データに対して対応点探索処理を実行する対応点探索処理部16とを備えている。
(もっと読む)
物体の改善されたステレオ画像を得る方法およびシステム
注目の物体のステレオ画像に関する改善された深さ精度を得る方法であって、
第1の位置から注目の物体の第1の画像を撮像すること、
第1の位置とは異なる第2の位置から注目の物体の第2の画像を撮像することを含み、
第1の画像および第2の画像に基づいて、注目の物体に関する深さの概略推定を求めること、
深さの概略推定に基づいて、注目の物体に関する改善された深さ精度に対応する改善された撮像位置のセットを求めること、
改善された撮像位置のセットから改善された画像を撮像すること、
改善された画像に基づいて改善された深さを求めること
を含む方法を開示する。
関連するシステムも説明している。  (もっと読む)
(もっと読む)
画像処理装置および画像処理方法
【課題】多重解像度画像を用いた対応点探索処理の処理性能を改善する。
【解決手段】互いに対応する画像内容を含んだ原基準画像と原参照画像とを取得する画像取得手段と、取得した原基準画像と原参照画像とを低解像度化することによって、解像度の異なる複数の画像を階層的に生成する多重解像度画像作成手段と、注目階層に属する注目基準画像に注目点を設定する注目点設定手段と、注目点についての、注目基準画像と注目参照画像との視差を求める視差特定手段と、視差特定手段が視差を求めるにあたって1)注目点を内包するウィンドウが注目基準画像内に収まるときには、ウィンドウ内の画像情報を用いる第1視差特定規則を、2)ウィンドウが注目基準画像からはみ出すときには、注目基準画像の外部領域からの寄与度を第1視差特定規則よりも低めた第2視差特定規則を、選択的にそれぞれ適用させる選択適用手段と、を備える。
(もっと読む)
1 - 20 / 100
[ Back to top ]