
Fターム[2F112FA50]の内容
Fターム[2F112FA50]に分類される特許
61 - 80 / 90
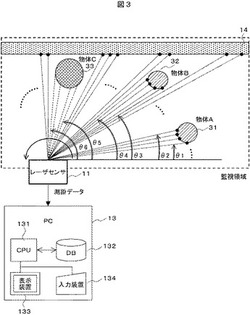
物体検知システム及びその方法
【課題】
レーザセンサによる測距の対象物からの反射光が十分でない場合でも、領域内の物体の存在を検知する。
【解決手段】
レーザセンサを用いて領域の背景に相当する物体の情報を背景データとして取得すし、レーザセンサを用いて領域内にある物体の測距データを取得し、取得した測距データと背景データの差分を計算して物体の存在位置を算出し、物体の形状を連続する座標値であるポイントデータとしこれに近接した周辺ポイントデータの中心座標であるクラスタを検出し、このクラスタのデータを用いて領域の物体の存在位置を検出する。また、測距データが得られない場合でも領域内の物体の存在を検知し、物体が特定の領域に進入した場合に警報を発する。
(もっと読む)
物体検出装置

【課題】平面上にある特定の物体を検出することができる物体検出装置を提供する。
【解決手段】演算処理装置12は、視差データ演算部121、路面パラメータ推定部122、路面投影部123、障害物範囲特定部124、障害物領域特定部125、距離測定部126及び表示画像生成部127を備える。障害物の検出にあたっては、まず、ステレオカメラ11から演算処理装置12へ2次元ステレオ画像を入力する。続いて、視差データ演算部121が、計測点Pにおける視差を演算し、路面パラメータ推定部122が路面パラメータである高さh及び傾きφを推定する。さらに続いて、路面投影部123が、基準画像上で計測点Pを路面に投影し、障害物範囲特定部124が障害物範囲を特定し、障害物領域特定部125が障害物領域を特定する。そして、障害物距離測定部126が、障害物までの距離を測定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】多くの照合データを必要とせず、計算時間で対象物体までの距離を計測することができる距離計測装置を提供する。
【解決手段】形状が既知であり、基準距離だけ離れた対象物体の画像の面積の慣性楕円を算出し、この算出した慣性楕円の楕円率の逆数と慣性楕円の長径のデータ群を多項式によって曲線近似した基準曲線のデータが予め記憶された基準曲線記憶手段と、距離の計測を行うべき対象物体の画像を取得する画像取得手段と、画像取得手段によって取得した画像中の対象物体の像から慣性楕円、該慣性楕円の長径及び楕円率の逆数とを求める画像解析手段と、基準曲線記憶手段に記憶されている基準曲線を参照して、画像解析手段によって求められた楕円率の逆数から基準距離における長径を求め、該基準距離における長径と取得画像から求めた長径との比から対象物体までの距離を求める距離算出手段とを備えた。
(もっと読む)
光学式変位計
【課題】 ラインセンサからの受光量の出力時間を短縮化させ、応答性を向上させた光学式変位計を提供することを目的とする。
【解決手段】 同一の半導体基板上に奇数素子20a及び偶数素子20bが交互に配置されたラインセンサ20と、奇数素子20aの受光量が入力され、当該受光量を順に出力する第1シリアル出力部21aと、偶数素子20bの受光量が入力され、当該受光量を順に出力する第2シリアル出力部20bとを備え、奇数素子20a及び偶数素子20bのいずれか一方から出力される同時に露光して求められた受光量に基づいて、上記ラインセンサの投受光条件を求めるフィードバック制御を繰り返し、受光量調整のための時間を短縮化させる。
(もっと読む)
情報処理システム
【課題】画像間の座標点を高精度に対応付ける。
【解決手段】基準画像3B上で指定される指定点3Pに対応する参照画像3R上の対応点を特定する際に、指定点3Pに対応する位置を通る第1基準方向に沿った線上で探索して第1対応点候補3N1を特定し、第1対応点候補3N1を通り、かつ第1基準方向に略垂直な第2基準方向に沿った線上で探索して第2対応点候補3N2を特定し、さらに第2対応点3N2を通り、かつ第1基準方向に沿った線上で探索して第3対応点3N3を特定する。
(もっと読む)
物体認識装置および物体認識方法
【課題】距離画像を使用して高速かつ高精度に物体の種類や向き、数等を識別することができる物体認識装置を提供すること。
【解決手段】物体認識装置は、レンジファインダ等の対象物の表面の距離画像を取得する手段、設定された単位長情報に基づいて距離画像から離散化距離画像データを生成する手段、離散化距離画像データから立体高次局所自己相関によって特徴データを抽出する手段、予め学習した情報に基づいて多変量解析を行って、特徴データから対象物の種類、姿勢、個数の内の少なくとも1つを判定する手段を備える。対象物の切り出しやマッチング処理を行わずに対象物を認識するので、計算量が少なく、実時間処理が可能である。また、物体の種類と共に個数や姿勢(向き)も判定可能である。
(もっと読む)
測距装置
【課題】衝突警報などのために、車両などの移動体に搭載され、ステレオ法によって、2台の撮像手段の物体に対する視差から物体までの距離を求めるようにした測距装置において、物体までの距離を正確に計測する。
【解決手段】ステレオカメラ1,2の撮像画像において、物体のエッジに対する視差から直接距離を求めるのではなく、先ずエッジ検出部11が検出したエッジ情報を用いて、処理領域設定部12が物体が存在する可能性のある候補領域を切出し、その切出した候補領域に対して、対応領域探索部13がPOC法などで対応領域探索を行う。したがって、候補領域を切出すことで、対応領域探索の演算量をむやみに増加することなく、その部分だけPOC法で高精度に対応領域探索を行い、距離検出部14が距離検出を行うことで、コントラストが低い先行車や曲線の多い先行車までの距離を正確に計測できる。
(もっと読む)
自律車両ナビゲーションのための三次元障害物マップ作成の方法及びシステム
【課題】自律車両のナビゲーション中の障害物を避けるために、3次元(3D)障害物マップを作成する。
【解決手段】画像取り込み装置を自律車両に提供し、画像取得装置を、所定数の異なる指定距離にフォーカスして、指定距離それぞれにおける画像を取得する。そして、取得された画像それぞれに関してどの領域にピント合わせされているかを識別し、対応するレンズフォーカス距離を、ピント合わせされている領域それぞれに割り当てる。その後、取得した画像それぞれに基づいて合成画像を形成する。領域それぞれには、対応するレンズフォーカス距離がラベル付けされる。その後、合成画像から三次元障害物マップが生成される。この障害物マップはx、y、z座標系を有し、x及びyはピクセル水平位置及び垂直位置に比例し、zはレンズフォーカス距離である。
(もっと読む)
画像のステレオ・マッチングのためのシステム及び方法
前処理ステップとして動的プログラミングを用いる大域的最適化関数(例えば、確率伝播関数)を用いる少なくとも2つの画像(例えば、立体画像対)のステレオ・マッチングのためのシステム及び方法が提供される。本開示のシステム及び方法は、シーンから第1及び第2の画像を取得し(402)、第1画像内の少なくとも1つの点と第2画像内の少なくとも1つの対応する点との視差を推定し(404,406)、この推定した視差を確率伝播関数(例えば、大域的最適化関数)により最小化する(410)ことを提供する。確率伝播関数は、その確率伝播関数を高速化するよう、第1及び第2の画像に適用される決定論的マッチング関数(例えば、動的プログラミング)の結果により初期化される。システム及び方法は、更に、推定した視差から視差マップを生成し、それを奥行きマップに変換する。 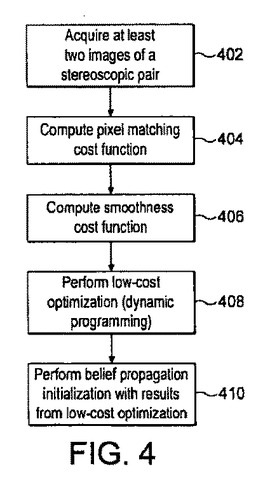 (もっと読む)
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】レーザ光の走査領域を予め設定された矩形形状とすることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】ミラー13によってレーザ光を走査領域において走査させる。ミラー13の回動に伴って回動する光学素子(ミラー15)によってサーボ光を光検出器(PSD106)の受光面上において走査させる。ミラー13は、レーザ光の走査領域が矩形形状となるよう、第1の方向および第2の方向に回動制御される。光検出器は、このようにミラーを回動制御したときの受光面上におけるサーボ光の走査領域の歪が抑制される方向に傾斜して配置される。
(もっと読む)
カメラ位置を得るための中央絞り開口を備えた、単一レンズ、単一センサー3D撮像装置
【課題】
デフォーカス技術を用いた三次元(3D)撮像装置および方法を開示する。
【解決手段】
この装置は、1つのレンズと、目標とする被写体の全体画像を投影するために、光軸に沿って位置づけられた1つの中央絞り開口と、光軸外に位置づけられた少なくとも1つのデフォーカス絞り開口と、被写体から出てかつレンズ、中央絞り開口および少なくとも1つのデフォーカス絞り開口を通過した電磁放射線を獲得するために動作可能なセンサーと、センサー情報を処理しかつ被写体の3D画像を生成するためにセンサーと通信可能に接続されたプロセッサとを有する。中央絞り開口用とデフォーカス絞り開口用とに、異なる光学フィルターをそれぞれ用いることができ、これにより、中央絞り開口により生成された背景画像が、デフォーカス絞り開口により生成されたデフォーカス画像から容易に区別できる。
(もっと読む)
変位測定方法および装置
【課題】簡便な構成で、真直度(z方向変位)と、ピッチングとローリング(x、y軸周りの回転傾き)のうち少なくとも一方とを、同時に測定する装置を提供すること。
【解決手段】光源から導かれた光を測定対象50上の互いに異なる2以上の方向に出射する光出射手段10と、該光出射手段10により出射された光が前記測定対象50に照射され、反射された光を受光して受光位置の変化を計測可能な2以上の受光手段30、40と、を有する。
(もっと読む)
物体の距離導出装置
【課題】物体の距離導出装置において、距離導出に要する時間を短くし、物体と撮像手段間の距離を正確に導出する。
【解決手段】距離算出手段は、n個の個眼像を一括して取得し、予め用意されている多数の離散的な仮距離Dnの中から最初の仮距離D1を設定し(S1)、各個眼像を構成する画素を、設定した仮距離D1に再配置して1つの再構成画像を作成する(S2)。同様にして、各個眼像を構成する画素を、設定した仮距離D1に逆投影してn個の逆投影画像を作成する(S3)。次に、再構成画像におけるxy座標の画素と、逆投影画像におけるxy座標の画素との偏差を、1つの再構成画像に対するn個の逆投影画像ごとに算出して合計し、仮距離D1における評価値SSDを算出する(S4)。上記工程を全ての仮距離Dnについて繰返し(S5)、評価値SSDが最小になるときの仮距離Dnを各xy座標の画素についての物体距離として決定する(S6)。
(もっと読む)
計測装置
【解決課題】正常に受光できなかった場合でも、低コストな構成で、位相差や距離を精度よく計測することができるようにする。
【解決手段】4つの電荷蓄積量データが、全ての受光信号が適切であると(120)、4つの電荷蓄積量データを用いて、検出物体までの距離を算出する(122)。また、電荷蓄積量データのうち3つが適切な値であると(124)、正常電荷量範囲外である電荷蓄積量データを補正し(126)、適切な値である3つの電荷蓄積量データと補正された電荷蓄積量データとから、検出物体までの距離を算出する(128)。また、2つの電荷蓄積量データのみが適切な値であると(130)、非発光時の電荷蓄積量データの取得し(132)、適切な値である2つの電荷蓄積量データの各々から外乱成分を除去した値に基づいて、検出物体までの2つの距離候補を算出し(134、136)、距離候補から正しい距離を選択する(138)。
(もっと読む)
遠赤外線撮像システム及び遠赤外線撮像方法
【課題】複数の遠赤外線撮像装置の出力値を、同一の対象物に対しては略一致するように補正することができる遠赤外線撮像システム及び遠赤外線撮像方法を提供する。
【解決手段】 マトリックス状に配列された撮像素子を有し、車両の周辺の画像を撮像した画像データを前記撮像素子の出力値として取得する複数の遠赤外線撮像装置が相互にデータ通信可能に接続してあり、撮像された画像に基づいて撮像素子ごとに出力値を補正して出力する。一の遠赤外線撮像装置は、画像中の路面を示す領域を設定し、設定された路面を示す領域の出力値の平均値を算出し、他の遠赤外線撮像装置へ送信する。他の遠赤外線撮像装置は、算出された平均値を受信し、画像中の路面を示す領域を設定し、設定された路面を示す領域の出力値の平均値を算出し、両平均値を略一致させるオフセット補正値を算出して、出力値を補正する。
(もっと読む)
カメラ用距離計測装置およびカメラシステム
【課題】 使い勝手が良く、カメラによる撮影時にも距離計測が可能なカメラ用距離計測装置およびそのカメラ用距離計測装置を備えたカメラシステムを提供すること。
【解決手段】 外部装置を装着するための装着部を備えたカメラに着脱可能なカメラ用距離計測装置であって、視差を有する少なくとも2枚の画像を生成する撮像部と、撮像部により生成した画像に基づいて、対象物までの距離を計測する計測部と、装着部に接続可能な接続部とを備える。なお、計測部による計測結果に基づく情報を表示する表示部をさらに備えても良い。また、カメラとの間の通信を行う通信部をさらに備えても良い。
(もっと読む)
ステレオカメラ装置
【課題】左右のレンズの焦点位置合わせの誤差を容易に小さくすることができるステレオカメラ装置を提供する。
【解決手段】一対のレンズ11,16とこの一対のレンズ11,16に対応する一対のCCD12,17とを有するステレオカメラ10を備えているステレオカメラ装置において、一対のレンズ11,16と一対のCCD12,17との間隔を駆動部60で調整する。一対のCCD12,17のうち間隔が調整されたCCD12から出力された特定パターンの画像データとCCD17から出力された特定パターンの画像データとを画像処理部40に入力し、画像処理部40で両画像データの差分を求め、この差分に基づいて駆動部60を制御するようにした。
(もっと読む)
3次元座標取得装置
【課題】 特別な装置を必要とすることなく、ステレオカメラのキャリブレーションを行うことの出来る3次元座標取得装置の提供。
【解決手段】 車両に搭載され、所定の設置距離で配置された、2台のカメラで取得された複数の画像を用いて、車両周辺の物標の3次元座標を取得する装置において、1台のカメラが取得した画像から、第1の特徴点を抽出し、その3次元座標を演算する手段、2台のカメラが同時に取得した2枚の画像から第2の特徴点を抽出し、2枚の画像の中で対応付ける手段、第2の特徴点の対応関係から基礎行列を演算し、カメラの仮のキャリブレーション値を推定して第2の特徴点の仮の3次元座標を演算する手段、同一の第1及び第2の特徴点についてそれぞれ演算された3次元座標を比較して、2台のカメラ間の距離スケールを求める手段、第2の特徴点の仮の3次元座標及び2台のカメラ間の距離スケールから、第2の特徴点の3次元座標を演算する手段からなる。
(もっと読む)
顔モデル作成システム
【課題】顔形状の特徴点からなるモデルを自動生成する。
【解決手段】正準化処理部112は、レンジファインダ100が取得したモデル化対象の顔(対象顔)の距離画像を、姿勢及び位置を正しく合わせる。2次元DPマッチング部114は、この距離画像と、標準顔パッチモデル距離画像122との画素同士の対応関係を、2次元DPマッチングにより求める。この対応関係に基づき、モデル変形部116が、標準顔パッチモデル126の各特徴点を対象顔の形状に合わせて移動させることで、標準顔パッチモデル126を変形して対象顔のパッチモデルを生成する。
(もっと読む)
距離計測装置・撮像装置、距離計測方法・撮像方法、距離計測プログラム・撮像プログラムおよび記憶媒体
【課題】精度の高い距離情報を取得すること。
【解決手段】本発明にかかる距離計測装置1は、撮像部10から出力された画像信号群に基づいて撮像視野内に位置する物体までの距離を演算する演算部24と、所定の検出範囲内に位置する物体までの距離を検出するレーダ60と、レーダ60における検出値に基づいて演算部24における演算値が正常または異常であるかを判定する判定部22と、判定部22が異常であると判定した演算値を修正する修正部23と、を備える。本発明にかかる距離計測装置1によれば、判定部22が異常であると判定した演算値を修正した距離データを出力するため、精度の高い距離情報を取得することができる。
(もっと読む)
61 - 80 / 90
[ Back to top ]