
Fターム[2G017AA16]の内容
Fターム[2G017AA16]に分類される特許
1 - 20 / 158
方位誤差補償装置、方位誤差補償方法、方位誤差補償プログラム、誤差角度補償装置、3軸磁気センサ及びセンサモジュール
地磁気センサ
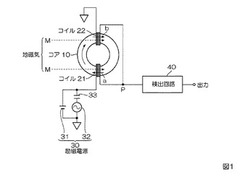
【課題】低消費電力化を図る。
【解決手段】地磁気センサは、閉磁路を構成するコア10と、コア10の互いに対向する位置に巻回され、コア10に同じ周回方向に磁束を発生させるように直列接続された一対のコイル21,22と、一対のコイル21,22に直流電流を重畳した交流電流を印加する励磁電源30と、一対のコイルの接続点Pに接続された検出回路40とを備える。従来のフラックスゲート型の地磁気センサのようにコアが磁気飽和するまで励磁するといったことは不要となる。
(もっと読む)
状態推定装置

【課題】非線形カルマンフィルタを用いて高速且つ正確な状態推定を行う。
【解決手段】携帯機器1は、3次元地磁気センサ70、3次元加速度センサ80、CPU10、状態推定プログラム100を備え、状態推定プログラム100は、複数の磁気データq1〜qNの示す座標を近傍に有する球面の中心点cSの座標を算出する中心点算出モジュール300と、複数の加速度データa1〜aMに基づいて、携帯機器の動きが安定しているか否かを判定する安定性判定モジュール400と、安定性判定モジュール400が行う判定結果が肯定である場合に初期ベクトルINIを算出する初期ベクトル生成モジュール500と、初期ベクトルINIを初期値とする状態ベクトルxを観測値ベクトルyを用いて更新するカルマンフィルタモジュール600とを備える。
(もっと読む)
磁気測定データ校正装置及び方位角計測装置
【課題】環境オフセットの変動に対する追従性を向上させる磁気測定データ校正装置及び方位角計測装置を提供する。
【解決手段】本発明は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される測定軸毎の磁気測定データのオフセットを求め、磁気測定データを補正する装置であり、測定された磁気測定データの測定軸毎の磁気データと、前回のオフセットとの差分から誤差関数を求める誤差関数計算部と、誤差関数及び前回の共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の磁気測定データの測定時のオフセットに対し、オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された磁気測定データを用い、以前に測定された磁気測定データを母集団とする磁気測定データの共分散行列を更新する共分散行列更新部とを備える。
(もっと読む)
地磁気測定装置
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】地磁気測定装置は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標を近傍に有する、第1楕円面、第2楕円面、及び第3楕円面の形状を表す、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzを生成する初期楕円面生成部310と、第1楕円面の中心点cxx、第2楕円面の中心点cyy、及び第3楕円面の中心点czzの相互間の距離が、第1閾値Δc以下であることを判定する初期楕円面中心点判定部322と、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzに基づいて初期楕円面補正行列T0を生成するとともに、中心点cxx、中心点cyy、及び中心点czzに基づいて初期中心点cE0を生成する初期補正値生成部330とを備える。
(もっと読む)
地磁気測定装置、地磁気測定方法、及び地磁気測定プログラム
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】機器1は、内部磁界Bi及び着磁磁界Bmを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標が、最適中心点cEOPを中心とする楕円面近傍に分布すると仮定して、当該楕円面上の座標を、最適中心点cEOPを中心とする球面上の座標へと変換する最適楕円面補正行列TOPを、対称行列である変数行列Tの各成分を変数とする楕円面最適化関数fEL(T,c)を最小化することにより算出する。そして、磁気データqiの示す座標を、最適楕円面補正行列TOP及び最適中心点cEOPの示す座標を用いて、変換後磁気データsiの示す座標に変換し、変換後磁気データsiの示す座標と最適中心点cEOPの示す座標に基づいて地磁気Bgの向きを算出する。
(もっと読む)
磁気センサ
【課題】 特に、軟磁性体と磁気抵抗効果素子間でオフセットが生じても、外乱感度を小さくすることができる磁気センサを提供することを目的とする。
【解決手段】 軟磁性体3のY1側部側に位置し、感度軸方向P1がY2、Y1からの水平磁界成分を受ける第1磁気抵抗効果素子S1と、軟磁性体のY2側部側に位置し、感度軸方向P2はY1、Y2からの水平磁界成分を受ける第2の磁気抵抗効果素子S2と、軟磁性体のY2側部側に位置し、感度軸方向がY2、Y2からの水平磁界成分を受ける第3磁気抵抗効果素子S3、軟磁性体のY1側部側に位置し、感度軸方向がY1、Y1からの水平磁界成分を受ける第4磁気抵抗効果素子S4と備える。S1とS2とが直列接続されたA素子群と、S3とS4とが直列接続されたB素子群が構成される。A素子群とB素子群とが直列接続されるとともに、A素子群とB素子群の間に出力端子が設けられる。
(もっと読む)
ホール素子の駆動回路
【課題】ホール素子への駆動電流への影響を低減しつつ、ホール素子を安定に駆動することを可能とするホール素子の駆動回路を提供する。
【解決手段】ホール素子から出力されるホール電圧の中点電位を出力する差動アンプ回路16及び分圧回路18と、分圧回路18から出力された中点電位に応じてホール素子10の入力電位を出力するオペアンプ14と、を備えるホール素子10の駆動回路100とする。
(もっと読む)
地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム
【課題】外部磁界の影響の程度を評価してオフセット値の採否を決定する。
【解決手段】機器1は、内部磁界Biを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データqiで示される座標の分布の3次元的な広がりの程度を示す分散評価値を算出し、複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする球面Sの近傍に確率的に分布すると仮定して、球面Sの中心点x0を算出し、複数の磁気データqiで示される座標が、球面S2を歪ませた形状の立体SDの表面近傍に確率的に分布すると仮定して算出される立体SDと球面S2との形状の相違の程度を示す歪評価値gD(E)が、歪許容値δ0以下である場合に、中心点x0を3次元磁気センサ60のオフセットとして採用する。
(もっと読む)
磁気データ処理装置、磁気データ処理方法及び磁気データ処理プログラム。
【課題】磁気データ測定装置のオフセットを更新する。
【解決手段】機器1は、内部磁界を発生させる部品と3次元磁気センサ60とCPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データに基づいて、部品の発生する磁界の成分を表す3軸の座標であるオフセットを、旧オフセットから新オフセットに更新する。新オフセットは、複数の磁気データで示される座標を表面近傍に有する球面と磁気データで示される座標との誤差を第1誤差、複数の磁気データの分散を表す共分散行列の最小固有値に対応する正規化された固有ベクトルと旧オフセットから見た球面の中心の座標を示す更新ベクトルとの内積に第1係数を乗じた第2誤差、及び共分散行列の中間固有値に対応する正規化された固有ベクトルと更新ベクトルとの内積に第2係数を乗じた第3誤差を要素とする誤差ベクトルの大きさを最小化する球面の中心の座標として算出される。
(もっと読む)
地磁気センサ
【課題】温度が変化しても磁性体コアが磁気飽和するまでの時間が変化しないようにし、同期検波の位相ずれによる出力誤差を低減する。
【解決手段】磁性体コア11に励磁コイル12と検出コイル13が巻回されたセンサ部10を有し、検出コイル13より得られる検出出力から直流成分を除去した出力を励磁コイル12を励磁する励磁周波数の2倍の周波数信号により同期検波し、検波後の出力を積分して検出コイル13に負帰還する地磁気センサにおいて、励磁周波数信号と励磁周波数の2倍の周波数信号とその2倍の周波数信号と位相が90度ずれている信号を出力する発振回路70と、前記直流成分を除去した出力と励磁周波数の2倍の周波数信号と位相が90度ずれている信号の位相差を検出して出力する位相差検出部50と、位相差検出部50の出力を積分する積分器60と、積分器60の出力により励磁コイル12に流れる励磁電流を制御する励磁制御部33を具備する。
(もっと読む)
磁気センサ
【課題】 特に、従来よりも少ないチップ数で複数軸の外部磁界検知を可能とする磁気センサを提供することを目的とする。
【解決手段】 磁性層と非磁性層とが積層されて成る磁気抵抗効果を発揮する複数の磁気抵抗効果素子S1〜S3と、各磁気抵抗効果素子と絶縁層4を介して非接触の位置に設けられた軟磁性体3とを有し、平面視にて前記軟磁性体3のX1−X2の両側に夫々、固定磁性層の固定磁化方向P1が、X1−X2方向に向けられた磁気抵抗効果素子S1〜S3が配置されており、磁気抵抗効果素子S1,S3と磁気抵抗効果素子S2とで固定磁化方向P1が互いに逆方向にされている。
(もっと読む)
磁気センサモジュール及び磁気センサモジュールの製造方法
【課題】一対の主面が実装面に対して垂直となるように、半導体基板(素子基板)を容易かつ確実に実装面上に実装することが可能な磁気センサモジュール、及び、当該磁気センサモジュールの製造方法を提供する。
【解決手段】一対の主面51,52に対して平行な磁場を検出する感磁部54が形成された半導体基板50と、該半導体基板50が実装される実装面21を有するモジュール基板20とを備える磁気センサモジュールに10おいて、半導体基板50を一対の主面51,52がそれぞれ実装面21に対して垂直をなす状態で該実装面21上に配置し、これら一対の主面51,52の双方を実装面21に対し金属バンプ60を介して接合する。
(もっと読む)
撮影装置
【課題】 地磁気センサを搭載した撮影装置において、変位することで地磁気センサに及ぼす磁気的な影響量が変化する部品があっても、この影響を排除して正確な方位の計測を行えるようにすることにある。
【解決手段】 地磁気を検出する地磁気センサと、撮像を行う撮像部と、地磁気センサに磁気的な影響を及ぼす部位を含み、当該部位の位置が可変にされた可動部と、この可動部の変位量と可動部から地磁気センサに及ぼされる磁界との関係を表わす変位量対磁界データが記憶された記憶手段と、変位量対磁界データと前記可動部の変位量とに基づいて可動部から地磁気センサに及ぼされる磁界を求め(S8〜S10)、この磁界を地磁気センサの出力から差し引いて方位を算出する(S11)方位算出手段とを備えている。
(もっと読む)
物理量計測装置および物理量計測方法
【課題】測定対象であるベクトル物理量の大きさが均一な空間で取得された測定データ群でなくとも、状況に応じて迅速にまたは高精度に信頼性の高いオフセットを推定して、推定されるオフセットの信頼性を一段と向上させることを可能とする。
【解決手段】差分ベクトル群を用いた所定の評価式に基づいて、取得したベクトル物理量データ群に含まれるオフセットを統計的手法により推定する。オフセット推定は、ベクトル物理量データ群と、差分ベクトル群と、推定された複数の基準点とのうち少なくとも一つに基づき、基準点の信頼性情報を算出するための算出パラメータに従って、基準点の信頼性情報を算出し、該信頼性情報を判定閾値と比較することによって基準点の信頼性の有無を判定し、信頼性有りと判定された基準点をデータ取得手段の取得したベクトル物理量データに含まれるオフセットとして出力する。
(もっと読む)
3軸磁気センサ、電子コンパス
【課題】消費電力を抑制しつつユーザーが必要とするタイミングに正確な方位を計測できる電子コンパスを実現する。
【解決手段】3軸の磁気成分を所定周期で検出するとともに前記3軸の磁気成分を表すアナログ磁気データを出力する検出ユニットと、前記アナログ磁気データを前記デジタル磁気データに変換するAD変換ユニットと、オフセットを導出するための母集団を蓄積するためのバッファメモリと、前記デジタル磁気データ同士の距離に応じて前記デジタル磁気データを前記母集団とするか否かを判定し、前記母集団としての前記デジタル磁気データを前記バッファメモリに格納するとともに、前記母集団をプロセッサから要求されると前記バッファメモリから前記母集団を読み出して出力する論理回路と、を備える。
(もっと読む)
誤差要因判定方法およびその装置、並びに誤差補償方法、3軸磁気センサ、センサモジュール、誤差要因判定用のプログラム
【課題】計測および算出される方位角に含まれる誤差の要因を評価できると共に、その誤差を相殺して正確に方位角を決定する。
【解決手段】3軸磁気センサの磁界検知方向の空間ベクトルXm、Ym、Zmを計算すると共に(S1〜S4)、各磁気素子11X、11Y、11Zの磁界検知方向の空間ベクトルXe、Ye、Zeを計算する(S1〜S3、S5)。空間ベクトルXm、Ym,Zmについて、ベクトル間の互いの交角をそれぞれ計算すると共に、空間ベクトルXe、Ye,Zeについて、ベクトル間の互いの交角をそれぞれ計算する(S6)。磁界印加方向、素子の磁界検知方向、および3軸磁気センサの磁界検知方向の互いの一致性と、素子の磁界検知方向の3つの交角と3軸磁気センサの磁界検知方向の3つの交角の一致性と、を検証することにより、誤差の要因を判定する。
(もっと読む)
磁気検知装置
【課題】 地磁気を検知する3軸のセンサを用いた磁気検知装置において、球面座標の基準原点を求めるキャリブレーション処理を少ない演算量で行うことができるようにする。
【解決手段】 3つの地磁気センサからの検知出力に基づいて、地磁気ベクトルの座標点データDi(xi,yi,zi)を得る。この座標点データは、三次元検知座標の原点Oから離れたオフセット位置に中心Oc(xc,yc,zc)を有し、且つ検知誤差係数a,b,cの大きさの歪みを有する非球面座標Ga上に位置している。そこで、中心Ocを有し複数の座標点データDiとの誤差が最小となる仮球面座標G1を演算で求めて、座標点xc,yc,zcを特定する。一方検知誤差係数a,b,cは演算で求めるのではなく、予め用意された複数の数字の組み合わせの中から最も誤差の少ないものを選択する。
(もっと読む)
磁界検知装置
【課題】 地磁気などの検知する3軸の磁気センサを用い、方位センサとして機能できる磁界検知装置を提供する。
【解決手段】 初期姿勢のときのX0−Y0−Z0軸の三次元座標上で地磁気ベクトルを検知する。その後の磁気ベクトル動き量を角速度を積分することで演算する。最新の座標点データが得られたときのX0軸回りの角速度の積分値の積算値である角度変化量θpと、Y0軸回りの角速度の積分値の積算値である角度変化量θrだけ、三次元座標を元に復元させると、Z0軸回りの回転角度、すなわち方位の変化角度αを算出できる。
(もっと読む)
磁気計
1 - 20 / 158
[ Back to top ]