
Fターム[2G021AK11]の内容
Fターム[2G021AK11]の下位に属するFターム
リサージュ図形の利用
基準位相信号の移相
基準位相信号との位相差 (9)
その他 (1)
Fターム[2G021AK11]に分類される特許
1 - 20 / 25
磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法
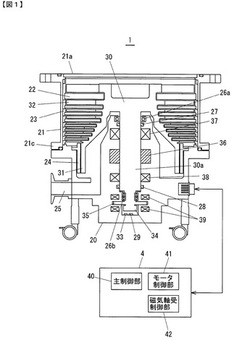
【課題】高速回転状態での振れまわり測定を行うことなく、波形振幅値を用いて振れまわりを容易に推定することができる振れまわり推定方法の提供。
【解決手段】磁気浮上式真空ポンプの振れまわり推定方法は、ロータ30を目標浮上位置に磁気浮上させる磁気浮上工程と、目標浮上位置に磁気浮上しているロータ30を複数の回転位置に順に停止させ、各停止時における2対の電磁石の電流をそれぞれ計測する電流計測工程と、2対の電磁石の少なくとも一方の対に関して、対を成す電磁石の電流の差分を複数の回転位置の各々について算出する差分算出工程と、ロータ30が一回転する間の差分の変化の振幅値を算出する振幅値算出工程と、予め得られている振れまわり量と振幅値との相関関係および振幅値算出工程で算出された振幅値に基づいて、ロータ30の振れまわり量を推定する推定工程と、を有する。
(もっと読む)
インペラの位相検出装置

【課題】アンバランス量を修正する作業工数を低減できるインペラの位相検出装置を提供する。
【解決手段】インペラの位相検出装置100であって、インペラ10の表面は、切削加工によって形成され、インペラ10の表面には、周囲の表面粗度Rz5よりも小さい表面粗度Rz1で加工される第1所定領域11が形成され、インペラの位相検出装置100は、第1所定領域11を検知する光センサユニット70と、インペラ10の位相を検出し、インペラ10のアンバランス量を算出するコントローラ50と、を具備し、コントローラ50は、光センサユニット70が第1所定領域11を検出するタイミングによって、インペラ10のアンバランス量を算出する。
(もっと読む)
トラックスケールにおける被計量車両の重心位置計測装置
【課題】既存のトラックスケール(演算処理装置を含む)に簡単な構成を付加することで、被計量車両の計量時に該被計量車両の重心高さ位置も同時に計測し得るようにする。
【解決手段】計量台10として、車両の全輪を同時に載せ得る面積の平坦面11とその前方位置に所定高さ段上げした前輪載せ台12を設けたものを使用し、被計量車両の前輪位置と後輪位置を検出し得る車輪位置検出器8を有し、演算処理装置3に、前後変位量算出手段と、車軸間距離算出手段21と、車両傾斜角算出手段22と、前輪軸重算出手段23Aと、後輪軸重算出手段23Bと、前後重心位置算出手段24と、記憶手段32と、前後重心変位量算出手段25と、車両重心高さ位置算出手段26とをそれぞれ備え、平坦面11上で算出した前後重心位置情報と前輪を前輪載せ台12上に載せた状態での前後重心位置情報とから算出された重心変位量と、車両傾斜角算出手段22で算出された車両傾斜角とから、被計量車両の重心高さ位置を算出するようにしている。
(もっと読む)
タイヤホイールアッセンブリの高速ユニフォミティ調整システム、高速ユニフォミティ調整方法、及び高速ユニフォミティ調整を施したタイヤホイールアッセンブリ
【課題】本発明の課題は、タイヤホイールアッセンブリの高速ユニフォミティを低減できる高速ユニフォミティ調整システムを提供することにある。
【解決手段】本発明のタイヤホイールアッセンブリの高速ユニフォミティ調整システム11は、タイヤホイールアッセンブリの高速ユニフォミティを計測する高速ユニフォミティマシン12と、計測した高速ユニフォミティのベクトルと、タイヤホイールアッセンブリに対して取り付けたバランスウエイトの遠心力のベクトルとの和で示されるベクトルの大きさが、計測した高速ユニフォミティのベクトルの大きさよりも低減するようにバランスウエイトの質量及び取付け位相を演算する演算装置21と、を備える。
(もっと読む)
タイヤホイールアッセンブリの高速ユニフォミティ調整システム、高速ユニフォミティ調整方法、及び高速ユニフォミティ調整を施したタイヤホイールアッセンブリとハブディスクアッセンブリとの組立体
【課題】本発明の課題は、タイヤホイールアッセンブリの重量を増加させることなくタイヤホイールアッセンブリの高速ユニフォミティを低減できる高速ユニフォミティ調整システムを提供することにある。
【解決手段】本発明の高速ユニフォミティ調整システム11は、タイヤホイールアッセンブリをハブディスクアッセンブリに取り付けたときに、推定又は計測したタイヤホイールアッセンブリの高速ユニフォミティのベクトルと、ハブディスクアッセンブリの重量アンバランスの重点位相に生じる遠心力のベクトルとの和で示されるベクトルの大きさが、推定又は計測した高速ユニフォミティのベクトルの大きさよりも低減するように取付け位相θを演算する演算装置21を備えることを特徴とする。
(もっと読む)
バランス修正方法と装置
【課題】回転機械に備えられる回転体のバランス修正において、回転体の切削対象部の傾きを考慮して、切削対象部を切削することで、バランス修正の精度を向上させることにある。
【解決手段】切削データ取得ステップS1で、アンバランスを除くために切削対象部を軸方向に切削する位相角と、当該切削の深さとを、それぞれ、切削位相角と切削深さとして予め求める。傾き計測ステップS2で、軸方向に対する切削対象部の加工開始面の傾きを計測する。移動距離取得ステップS3で、切削位相角と切削深さと傾きとに基づいて、切削位相角において、加工用初期位置から加工具を軸方向に移動させる移動距離を求める。切削ステップS4で、切削位相角において、移動距離だけ、加工用初期位置から加工開始面側の軸方向に加工具を移動させることで、切削対象部を切削する。
(もっと読む)
慣性乗積計測装置及び慣性乗積計測方法
【課題】慣性乗積を求める慣性乗積計測装置及び慣性乗積計測方法を提供する。
【解決手段】架台12と、架台12を水平角0°方向に沿って揺動させる転動子14と、架台12に対して回動可能に設けられ、被計測体200を載せ置くターンテーブル10aを備えた載置台10を有する慣性乗積計測装置において、ターンテーブル10aを回転させ、水平角0°とは異なる第1水平角αと第2水平角(90°−α)に被計測体200を設定し、被計測体200を第1水平角αの方向に設定した状態で架台12を揺動させて得られる第1揺動周期と、被計測体200を第2水平角(90°−α)の方向に設定した状態で架台12を揺動させて得られる第2揺動周期とを計測し、第1揺動周期及び第2揺動周期から被計測体200の慣性乗積を導出する。
(もっと読む)
バランス修正用加工データの演算装置
【課題】バランス修正のために回転体の除去対象部分を除去加工する場合において、高精度に除去加工すべき位置と量を取得する。
【解決手段】除去対象部は、回転中心から半径方向外端までの距離が方位によって異なる。仮加工方位および仮加工深さと、このデータで仮に除去加工した場合に除去されるアンバランスを示す仮除去アンバランスデータとを対応付けて、複数組の該加工データと該仮除去アンバランスデータとを記憶する記憶部21と、回転体について測定された測定アンバランスデータに最も近い仮除去アンバランスデータと、当該仮除去アンバランスデータの周辺にある1つまたは2つ以上の仮除去アンバランスデータとを、記憶部21内のデータの中から抽出するデータ抽出部23と、抽出した複数の仮除去アンバランスデータに基づいて、測定アンバランスデータが示すアンバランスを除去するための実加工方位と実加工深さを算出する加工データ算出部25と、を備える。
(もっと読む)
試し錘取付方位算出装置と方法
【課題】回転体の所定部分に対する試し錘の取付方位と、回転体の検出回転角とを正確に対応付けられる手段を提供する。
【解決手段】回転体11の所定部分に対する試し錘の取付方位と、回転体の検出回転角とを対応付ける対応角度情報を取得する対応角度情報取得装置20。所定部分11aには、回転中心C周りの周方向における所定の基準点を基準として試し錘が取り付けられる。回転体11の回転角を検出する角度センサ7と、角度センサ7の検出回転角が所定値となる回転姿勢にある所定部分11aを、軸方向から撮像する撮像装置23と、撮像装置23により得た画像において、既知である所定方位に対する、基準点の方位のずれ角を特定する画像処理部と、を備える。所定値およびずれ角を対応角度情報とする。
(もっと読む)
振れ修正装置
【課題】修正対象物の個体差にかかわらず、修正に必要な時間および修正の回数を低減しつつ作業工程が定量的に管理される振れ修正装置を提供する。
【解決手段】修正対象物であるロータ15の中心軸20を中心とする全周において振れ量が取得されると、振れ量が最大となる振れ量最大位置において荷重印加部13はロータ15へ第一荷重L1を加える。これにより、第一荷重L1に対応するロータ15の個体ごとに固有の変位量が変化パターンPとして取得される。修正パターン選択部35は、取得した変化パターンPを参考に、複数の修正パターンのうち誤差が最小となる最適修正パターンを選択する。最適修正パターンを用いて、ロータ15の目標となる振れ修正量Trに対応する第二荷重L2を算出し、算出された第二荷重L2を荷重印加部13からロータ15へ加える。
(もっと読む)
ターボチャージャ・コアアッセンブリの物理特性を測定する方法および装置
【課題】ターボチャージャ・コアアッセンブリの物理特性を測定する方法の提供。
【解決手段】センターハウジング(5)と、タービンホイール(7)、コンプレッサホイール(8)および該センターハウジング(5)内に保持されているシャフトを備えたロータ(6)とを装備した、ターボチャージャ・コアアッセンブリ(4)の物理特性を測定する。ターボチャージャ・コアアッセンブリ(4)を不釣合い測定装置内にセットし、コンプレッサハウジング(2)と連結する。その後、ロータ(6)をほぼ通常の使用速度まで加速させ、不釣合いに起因するターボチャージャ・コアアッセンブリ(4)の振動を測定する。同時に、加速したロータ(6)によって圧縮された空気流を、コンプレッサハウジング(2)の出口(23)から計測管に導き、圧縮された空気流内の圧力変動を測定し判定する。
(もっと読む)
回転バランス修正装置及び方法
【課題】より精度良く修正対象部の修正加工を行うことが可能な回転バランス修正装置を提供する。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサの出力信号及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出するバランス演算処理部と、修正角度を基に回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部と、磁気センサの出力信号からオフセット成分を抽出するローパスフィルタと、磁気センサの出力信号にローパスフィルタにて抽出されたオフセット成分を加算する加算部と、オフセット成分加算後の磁気センサの出力信号からバランス修正加工部による位置決め前の回転軸の原点復帰に必要な原点基準信号を生成する基準信号生成部とを備える。
(もっと読む)
回転バランス修正装置及び方法
【課題】より精度良く修正対象部の修正加工を行うことが可能な回転バランス修正装置を提供する。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサの出力信号及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出すると共に、磁気センサの出力信号に含まれるオフセット量を算出するバランス演算処理部と、修正角度を基に回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部と、磁気センサの出力信号に前記オフセット量を加算する加算部と、オフセット量加算後の磁気センサの出力信号からバランス修正加工部による位置決め前の回転軸の原点復帰に必要な原点基準信号を生成する基準信号生成部とを備える。
(もっと読む)
回転バランス修正装置及び方法
【課題】低コストで修正対象部の回転軸に対する固定方位を検出することができ、その固定方位に応じた補正を行うことで所望の切削量を実現して正確な回転バランス修正を行う。
【解決手段】N極とS極に2分して着磁された回転軸の軸端面に対向して設置された磁気センサと、高速回転体を高速回転可能に支持する回転支持体に設置された加速度センサと、磁気センサ及び加速度センサの出力信号に基づいて、修正対象部の修正量及び修正角度を算出するバランス演算処理部と、修正角度を基に前記回転軸の回転角を位置決めした後、修正量を基に修正対象部を修正加工するバランス修正加工部とを備え、バランス演算処理部は、回転軸の軸端面における着磁方位と修正対象部の回転軸に対する固定方位との関係に応じて修正量と修正角度の少なくとも一方を補正する。
(もっと読む)
回転体への挿入物のアンバランス測定方法及びアンバランス修正方法
【課題】 挿入物が回転体に対して非固定で挿入されている場合であっても、挿入物の単体としてのアンバランス量と位相の測定を容易に行い、そのアンバランスを適宜修正することを可能にした回転体への挿入物のアンバランス測定方法及びアンバランス修正方法を提供する。
【解決手段】 回転体に対して非固定で取り付けられた挿入物の単体としてのアンバランス量と位相を測定する方法であって、挿入物の周上の任意の位置に第1の計測用ウェイトを装着した状態で挿入物と第1の計測用ウェイトと回転体からなる複合体のバランス測定を行い、挿入物の前記ステップにおけるウェイト装着位相から30°〜150°ずらした位置に第2の計測用ウェイトを装着した状態で挿入物と第2の計測用ウェイトと回転体からなる複合体のバランス測定を行った後、これら2つの条件で測定された複合体のアンバランス量と位相、各計測用ウェイトの質量、及び、挿入物に設定された基準位置からの各計測用ウェイトの位相に基づいて、挿入物の単体としてのアンバランス量と位相を演算する。
(もっと読む)
回転体のアンバランス修正方法及び装置
【課題】除去部分の重心方位とアンバランス重心方位とを一致させることでアンバランス修正を高精度に行う。
【解決手段】重心ズレ角度φ1(アンバランス重心方位D1の、除去対象部品の多角形の一つの頂点Vからの角度)に基づいて、除去加工部分の重心Gの方位がアンバランス重心方位D1と一致するような、回転体上の除去加工方位φ2を算出し、算出した除去加工方位φ2において除去加工を行う。
(もっと読む)
タイヤの高速ユニフォミティの推定方法
【課題】予め定めた推定式を用いることにより、低速RFV等から高速ユニフォミティを精度良く推定する。
【解決手段】タイヤの高速ユニフォミティの推定方法であって、同一品種のタイヤについて、低速RFVと、トレッド部の中央部でのRROと、トレッド部の両端部でのRROと、両サイドウォール部のLROと、静アンバランスとを用いて高速RFVを推定する推定式を設定する設定工程(S2)と、高速RFVが未知の前記品種のタイヤについて、低速RFVと、トレッド部の中央部でのRROと、トレッド部の両端部でのRROと、両サイドウォール部のLROと、静アンバランスとを測定する測定工程(S3)と、前記測定結果と前記推定式とに基づいて前記タイヤの高速RFVを推定する推定工程(S4)とを含むことを特徴とする。
(もっと読む)
高速回転体の回転バランス計測装置及び方法
【課題】回転速度が30万rpmを超える場合でも、角度計測の検出遅れが少なく、角度と加速度の位相のずれが少なく、修正箇所の角度を正確に検出でき、ペンキ剥離等による誤動作が本質的に生じない高速回転体の回転バランス計測装置及び方法を提供する。
【解決手段】軸端面2aがN極とS極に2分して磁化された回転軸2を有する高速回転体1を高速回転可能に支持する回転支持体12と、回転支持体の加速度を検出する加速度センサ14と、軸端面に近接して設けられ回転軸の回転により正弦波信号と余弦波信号を出力する磁気センサ16と、正弦波信号と余弦波信号から回転軸の回転角度を検出する回転角検出器18と、検出された加速度と回転角度から高速バランスの修正量とその角度を演算する演算処理装置20とを備える。
(もっと読む)
振れ測定用リム
【課題】RROを簡単かつ精度良く測定可能な振れ測定用リムを提供すること。
【解決手段】振れ測定用リム10のリム径Dを正規リムのリム径の99.8〜99.86%の範囲内に設定し、ビードシート幅Pを正規リムのビードシート幅の55.0〜85.0%の範囲内に設定し、さらに、ビードシート角度が16〜20°の範囲内としてビードシート角度を正規リムのビードシート角度よりも大きく設定することで、リム組みして内圧を充填した際に、従来よりもビード部16の外面を周方向に渡ってリムフランジ14に正しく接触させることができる。このため、RRO測定値のばらつきが極小となって測定精度が上がり、測定を複数回行って平均値を取るという煩雑な作業が必要無くなる。
(もっと読む)
無線型振動計測システム及び方法
【課題】回転体のロータの振動位相計測を効率良く行うことができる振動計測システムを提供することである。
【解決手段】ロータの回転振動変位を振動波形信号として検出する振動センサと、ロータの回転を回転パルス信号として検出する回転検出器と、前記振動センサで検出された振動波形信号及び回転検出器で検出された回転パルス信号に基づいてロータのアンバランス成分を検出する振動位相検出装置と、前記回転検出器で検出した回転パルス信号を無線で前記振動位相検出装置に伝送する無線伝送ユニットとを備え、振動位相検出装置は回転検出器からの回転パルス信号の伝送遅れを補正して振動位相を求める。
(もっと読む)
1 - 20 / 25
[ Back to top ]