
Fターム[2H051BA66]の内容
自動焦点調節 (17,376) | TTL測距方法 (3,889) | ボケ検出法によるもの (2,631) | サーチ走査を行うもの (418) | 撮影レンズにより行うもの (393)
Fターム[2H051BA66]に分類される特許
1 - 20 / 393
撮影装置の自動合焦方法、自動合焦装置、撮影装置
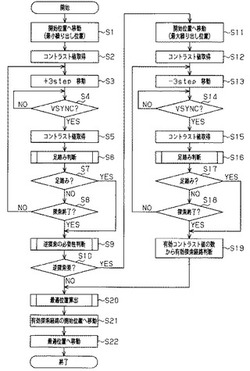
【課題】光軸方向において作用する重力がレンズ移動に影響を与えることを抑制し、従来に比して正確な合焦を可能とした撮影装置の自動合焦方法を提供する。
【解決手段】複数の光学レンズを備える写真レンズの該複数の光学レンズの一部または全部を、最小繰出し位置と最大繰出し位置との間の複数位置に、光軸方向において移動させるとともに合焦状態を測定することを複数回行うことにより複数の測定データを取得する第1工程と、前記複数の測定データに基づいて最適合焦位置を算出する第2工程と、前記最適合焦位置に前記光学レンズの一部または全部を移動させることにより自動合焦させる第3工程とを備える撮影装置の自動合焦方法において、前記自動合焦時に光軸方向に働く重力の影響の抑制を行うことを特徴とする自動合焦方法。
(もっと読む)
撮影装置、撮影方法、及びプログラム

【課題】被写体の前に障害物がある状況をより正確に判別し、かつ被写体に合焦した画像を容易に撮影可能とする。
【解決手段】CCD5の撮影画角内には、複数のオートフォーカス(AF)エリアが設けられている。CPU11は、所定のステップで近端ポイントから遠端ポイント(無限遠)までフォーカスレンズを移動し、所定のステップ毎にAFサーチ(合焦点検索)を行い、フォーカスレンズの位置と、AF検波のピーク数(合焦したAFエリア数)とに基づいて、複数の合焦点の中から1つの合焦点(被写体の合焦位置)を選択することで、デジタルカメラ1と被写体との間に存在する障害物40を排除し、被写体30にピントを合わせて撮影する。
(もっと読む)
駆動モジュール、電子機器及び駆動モジュールの制御方法
【課題】環境温度によってオートフォーカスの作動時間が長くなるのを防止することを目的とする。
【解決手段】駆動モジュールの駆動モードとして、形状記憶合金体に対して通電してその温度を漸次上昇させることでレンズ枠を全移動範囲に亘って移動させて焦点を探査した後、形状記憶合金体の温度を低下させて合焦位置までレンズ枠を移動させる第一駆動モードと、形状記憶合金体に対して通電してその温度を漸次低下させることでレンズ枠を全移動範囲に亘って移動させて焦点を探査した後、形状記憶合金体の温度を上昇させて合焦位置までレンズ枠を移動させる第二駆動モードと、を有し、制御手段が、環境温度を検出し、環境温度が閾値温度よりも低い場合に第一駆動モードを選択して環境温度が閾値温度よりも高い場合に第二駆動モードを選択し、選択された駆動モードに従い形状記憶合金体に対する通電を制御して駆動手段を駆動させる。
(もっと読む)
撮像装置
【課題】単一のモータ駆動回路であっても、高精度な位置決めとモータ駆動音の静音化が可能な撮像装置を提供する。
【解決手段】フォーカスレンズ111と、フォーカスレンズ111を駆動するブラシレスモータ112と、ブラシレスモータ112内のコイルへの通電を制御するモータ駆動部160と、モータ駆動部160に対してスキャン駆動と合焦駆動とを指示する中央制御部140とを有する撮像装置100において、中央制御部140は、フォーカスレンズ111を第2の駆動よりも高速で駆動可能な第1の駆動と、フォーカスレンズ111を第1の駆動よりも高精度に速度制御可能な第2の駆動とを切り替え可能であり、スキャン駆動においては第1の駆動を選択し、合焦駆動においては、合焦点位置までのレンズ駆動量が所定の閾値A以上である場合には第1の駆動を選択し、閾値Aよりも小さい場合には第2の駆動を選択する。
(もっと読む)
撮像装置
【課題】AFエリア内の評価対象から不要被写体を含む画像を除外すること。
【解決手段】制御装置104は、撮影画面内に設定された複数のAFエリア内の画像の色相成分のエッジを検出し、検出した色相成分のエッジに基づいて、AFエリア内から不要被写体が含まれる範囲の画像を除外する。
(もっと読む)
測距装置、測距用モジュール及びこれを用いた撮像装置及び測距用モジュールの製作方法
【課題】 測距用レンズとガラス基板と半導体チップとを一体化して、小型化と低コスト化とを図ることのできる加工方法を用いた場合においても、高精度な遮光を実現することが可能な測距装置を提供する。
【解決手段】本発明の測距装置は、互いに光軸O1、O2に平行な一対の測距用レンズ11a、11bを有して各測距用レンズによりそれぞれ被写体像を撮像領域16a、16bに形成するレンズアレイ板11と、撮像領域が形成されたウエハ板14と、レンズアレイ板11とウエハ板14との間に介在されかつ各測距用レンズに入射する像形成光束を各測距用レンズに対応する各撮像領域に導く透明板12とを一体に有する。透明板12には、レンズアレイ板11に臨む面の側からウエハ板14に臨む面の側に向かって厚さ方向に延びる遮光用溝17aと、ウエハ板14に臨む面の側からレンズアレイ板11に臨む面の側に向かって厚さ方向に延びる遮光用溝17bとが形成されている。この両遮光用溝の少なくとも一方に遮光用樹脂18が充填されている。
(もっと読む)
電子カメラ
【構成】撮像装置16は、フォーカスレンズ12を通して被写界を捉える撮像面を有し、被写界像を繰り返し出力する。輝度評価回路26は出力された被写界像の輝度を評価し、高域AF評価回路28および中域AF評価回路30は出力された被写界像の合焦度を評価する。シャッタボタン48sが操作されると、CPU46は、輝度評価回路26,高域AF評価回路28および中域AF評価回路30の出力に基づいて、露光量やフォーカスなどの撮像条件を調整する。CPU46はまた、シャッタボタン48sの操作に先立って、このような調整処理に要する時間を輝度評価回路26,高域AF評価回路28および中域AF評価回路30の出力に基づいて予測する。予測された時間の長さに応じて異なる指標は、LCDモニタ38を通して操作者に向けて出力される。
【効果】操作性が向上する。
(もっと読む)
撮像装置及びその合焦制御方法
【課題】撮影シーンが変化した場合でも、合焦すべき被写体に対して迅速なピント合わせを可能にすること。
【解決手段】撮像装置は、撮像素子106によって被写体を撮像した画像データに基づいて合焦状態を示す焦点信号を得て焦点調節を行う。AF処理部105はシステム制御部112の指令に従い、焦点信号に基づいてフォーカスレンズ103を駆動する。システム制御部112は、撮像した画像データを用いて撮影画面内の輝度に関する時間的な差分量を算出し、該差分量を閾値と比較することで撮影シーンの状態を判定する。撮影シーンが確定するまでの間はその状態の監視が続行され、撮影シーンが確定した場合にはシステム制御部112の指令により直ちに焦点調節の動作が行われる。
(もっと読む)
カメラ
【課題】焦点検出を高速かつ高精度に行うことができるカメラを提供する。
【解決手段】レンズユニット60が交換可能なカメラ本体10を有するカメラは、位相差AF手段30に入射する撮影レンズ62からの撮影光束LF1と焦点検出用光束LF2との光軸方向における像面位置のずれ量を補正する補正値BPとずれの方向を格納するメモリ22又は72を有する。また、カメラ本体はカメラMPU20、SAF手段40、TVAF手段50を有する。焦点検出用光束LF2の像面位置が撮影光束LF1の像面位置よりも前ピン側と後ピン側の一方の側にある場合に、カメラMPU20は、SAF手段40が検出した焦点位置P11から前記一方の側とは反対側にのみスキャン方向を設定する。
(もっと読む)
電子カメラ
【構成】撮像装置16は、フォーカスレンズ12を通して被写界を捉える撮像面を有し、被写界像を繰り返し出力する。CPU30は、シャッタボタン44sの半押しに対応して撮像装置16から出力された被写界像の高域AF評価値および中域AF評価値に基づいて相対比を算出し、算出された相対比の大きさに応じて異なる広がりを示すレンズ移動範囲を定義し、そして合焦点の探索のためにフォーカスレンズ12を定義されたレンズ移動範囲で移動させる。CPU30はまた、シャッタボタン30が半押しされた時点のフォーカスレンズ12の位置に応じて異なるように、レンズ移動範囲の定義特性を調整する。
【効果】合焦性能が向上する。
(もっと読む)
立体撮影装置および撮影制御方法
【課題】平面画像および立体画像をそれぞれ適切な撮影条件で撮影することができるとともに、平面画像と立体画像とのタイムラグを低減すること。
【解決手段】平面画像の撮影範囲に対応する露出量EVAと立体画像の撮影範囲に対応する露出量EVBとの差分(露出量差)を△EVとしたとき、△EV≦閾値である場合には、撮影範囲が小さい方の画像に対応する露出量を用いると判定し、△EV>閾値である場合には、EVA、EVBをそれぞれ用いると判定する撮影条件判定部75と、露出量以外の撮影条件の差分が許容範囲内であって、△EV≦閾値である場合には、平面画像および立体画像の両方を一回の露出で取得し、△EV>閾値である場合には、小さい方の露出量で露出を行って第1の撮像画像を生成するとともに、△EVで露出を行って第2の撮像画像を生成し、画像合成部77により前記第1の撮像画像と前記第2の撮像画像とを合成する撮影制御部76を備えた。
(もっと読む)
立体撮影装置および撮影制御方法
【課題】平面画像の撮影範囲と立体画像の撮影範囲とが異なる場合にそれぞれ最適の撮影条件で撮影された平面画像および立体画像を取得すること。
【解決手段】第1の撮影レンズ30Lと被写体を撮像して第1の撮像画像を生成する第1の撮像素子34Lとを有する第1の撮像系11Lと、第2の撮影レンズ30Rと前記被写体を撮像して第2の撮像画像を生成する第2の撮像素子34Rとを有する第2の撮像系11Rと、合焦位置および露出量のうち少なくとも一方を撮影条件として検出する際に、平面画像の撮影範囲に対応する第1の検出エリアにて第1の撮影条件を検出するとともに、前記平面画像の撮影範囲とは異なる立体画像の撮影範囲に対応する第2の検出エリアにて第2の撮影条件を検出する撮影条件検出部73を備えた。
(もっと読む)
電子カメラ
【課題】 被写体までの距離に基づいた撮影倍率に自動的に調整した上で撮影を行う。
【解決手段】 光学ズーム倍率を変更することが可能な撮像光学系と、被写体距離を検出する検出部と、設定された前記光学ズーム倍率に基づいて、撮影が許容される距離を示す撮影許容距離を算出する算出部と、検出部における被写体距離が算出部によって算出された撮影許容距離から外れた場合に撮像光学系における光学ズーム倍率を変更し、被写体距離と撮影許容距離とを一致させる制御部と、を備えたことを特徴とする。
(もっと読む)
撮像装置
【課題】シャッターチャンスを逃さずに、写り込みの影響を軽減する撮像装置を提供する。
【解決手段】撮像装置は、撮像素子を備える。フォーカシングレンズを備える。撮像素子で撮像して得られた画像信号に画像処理を施す画像処理部を備える。画像処理部は、合焦制御において、フォーカシングレンズを光軸方向に移動させながら、画像信号から得られる輝度信号に基づくコントラスト検出値を生成する。合焦制御においてフォーカシングレンズが近距離合焦領域を移動する間に、画像上にコントラスト検出値が大きく変化しない領域がある場合に、画像処理において、領域を除外した切り出しを行う。
(もっと読む)
バックフォーカス調整機構を具えた撮像装置
【課題】撮像装置において日中撮影モードから夜間撮影モードに切り換えたときに実施すべきバックフォーカスの調整に要する時間を従来よりも短縮する。
【解決手段】本発明に係る撮像装置は、撮像素子が内蔵された装置本体とレンズユニットとを具え、装置本体には、バックフォーカス調整機構と、撮像素子の光軸に直交する方向へスライド可能なスライド部材が配備され、該スライド部材には、赤外線カットフィルター671とダミーガラス板672とが並置され、撮像素子の光軸上に赤外線カットフィルター671を配置したデイ撮影モードと、撮像素子の光軸上にダミーガラス板672を配置したナイト撮影モードとの間で、モードの切り換えが可能であり、ダミーガラス板672は、赤外線カットフィルターによる光路長の伸びと同等の光路長の伸びが得られることとなる厚さt2よりも、大きな厚さt3に形成されている。
(もっと読む)
オートフォーカス装置、オートフォーカス方法及びプログラム
【課題】正確な合焦位置にフォーカスレンズを移動させることができるオートフォーカス方法を提供すること。
【解決手段】本発明の一態様に係るオートフォーカス方法は、フォーカスレンズを含む撮像光学系による被写体の結像から生成された画像信号に基づいてフォーカスレンズを移動させ、当該フォーカスレンズの位置を移動させる際に生成される複数の画像信号の焦点評価値をそれぞれ算出し、合焦指示に応じて、算出された複数の焦点評価値に基づいてフォーカスレンズの移動方向を決定し、フォーカスレンズを移動させる。
(もっと読む)
焦点調節装置、及び焦点調節方法
【課題】合焦動作をする時までに、画面内の合焦すべき被写体領域を判断して、撮影準備時に合焦すべき被写体に素早くピントを合わせることができる焦点調節装置及び方法を提供する。
【解決手段】焦点調節装置は、被写体像を電気信号に変換する光電変換手段108と、その出力信号から被写体の輝度に関する特定周波数帯域の信号成分を抽出する抽出手段110を有する。撮影準備前に、AFスキャン動作を行って、合焦すべき被写体領域を特定する第1の動作を実施する。撮影準備時に、AFスキャン動作を行って合焦動作をする第2の動作を実施する。第1の動作の終了前に撮影準備指示があった場合、第2の動作を行わず、第1の動作におけるAFスキャン動作を継続し、その結果に基づいて合焦動作をする。
(もっと読む)
撮像装置及び撮像方法
【課題】 被写体が動いても素早く焦点を合わせることができる撮像装置および撮像方法に関する。
【解決手段】 撮影レンズと、撮影レンズを介して受光した被写体光をもとに画像データを取得する撮像手段と、撮像手段から連続的に取得した画像データに基づいて被写体の動きを検知する動き検知手段と、動き検知手段が被写体の動きを検知したときに撮影レンズを駆動させて取得した画像データに基づいて合焦位置判定データを算出する焦点検出手段と、合焦位置判定データに基づいて合焦位置を推定する合焦位置推定手段と、を有する撮像装置による。
(もっと読む)
撮像装置、方法およびプログラム
【課題】 立体撮像装置がピントの合った被写体に合わせて電子的に輻輳角を調整できるようにする。
【解決手段】合焦状態にある第1画像データと第2画像データからそれぞれ検出された特徴点と対応点の組の総数が、所定の閾値th1を超えた場合、視差量のヒストグラムを生成するよう視差ヒストグラム生成部101を制御し、視差量のヒストグラムのビンから、代表視差量を決定するよう代表視差情報決定部102を制御する。代表視差情報決定部102は、焦点調節部33の決定したサーチ方向に従って、ヒストグラムの各ビンの有効性を、ビンの頻度fが所定の閾値th2を上回っているか否で判断する。代表視差情報決定部102は、有効ビンに属する視差量に基づいて代表視差量を決定する。立体表示制御部45は、決定された代表視差量に基づいて、第1画像データおよび第2画像データの切り出し範囲を決定する。
(もっと読む)
立体撮像装置及び立体撮像方法
【課題】合焦位置のズレを防いで立体視し易く眼が疲れにくい立体視画像を得ることができ、しかも装置サイズをコンパクトにすること。
【解決手段】左撮像系11Lのフォーカスレンズ130FLの被撮影空間における合焦位置P1、及び、右撮像系11Rの被撮影空間におけるフォーカスレンズ130FRの合焦位置P2を検出する合焦位置検出部144と、左撮像系11Lと右撮像系11Rとの視差量が許容範囲内になる撮影空間における立体視可能範囲を算出する立体視可能範囲算出部42と、各合焦位置P1、P2が立体視可能範囲内にあるか否かを判定する合焦位置判定部58とを備え、合焦位置P1、P2のうち立体視可能範囲内にあると判定されたひとつの合焦位置に、左撮像系11Lのフォーカスレンズ130FL及び右撮像系11Rのフォーカスレンズ130FRを合焦させる。
(もっと読む)
1 - 20 / 393
[ Back to top ]