
Fターム[2H059AA01]の内容
Fターム[2H059AA01]の下位に属するFターム
Fターム[2H059AA01]に分類される特許
1 - 14 / 14
照明光学系と結像光学系とが統合された光学系、及びそれを含む3次元映像獲得装置

【課題】3次元映像獲得装置の深さ情報の正確性を向上させるために、照明光学系と結像光学系とが、相互の光軸が一致するように統合されている光学系、及びそれを含む3次元映像獲得装置を提供する。
【解決手段】3次元映像獲得装置用の光学系は、光軸が通過する中心部に開口が形成されている結像用レンズである結像用対物レンズ111と、対物レンズ111の開口内に配置された照明用レンズである照明用対物レンズ122と、照明用対物レンズ122に照明光を提供する光源121と、を備え、結像用対物レンズ111と照明用対物レンズ122とは、光軸上に同軸に配置されている光学系110。
(もっと読む)
画像処理装置及びその制御方法

【課題】 立体視可能な左眼用画像及び右眼用画像の補正を行う際に、左眼用画像の特徴と右眼用画像の特徴とを反映したγ補正カーブを用いて、適正なダイナミックγ補正処理を行う。
【解決手段】 立体視可能な左眼用画像及び右眼用画像のヒストグラムを作成し、左眼用画像のヒストグラムから低階調側の階調値である第1暗部特徴量及び高階調側の階調値である第1明部特徴量を検出し、右眼用画像のヒストグラムから低階調側の階調値である第2暗部特徴量及び高階調側の階調値である第2明部特徴量を検出する。第1暗部特徴量及び第2暗部特徴量を用いて統合暗部特徴量を決定し、第1明部特徴量及び第2明部特徴量を用いて統合明部特徴量を決定する。統合暗部特徴量及び統合明部特徴量に基づいた階調補正パラメータを設定し、左眼用画像及び右眼用画像の階調を補正する。
(もっと読む)
撮像装置および撮像方法
【課題】撮像装置で予め撮像した画像を、簡便に立体的に表示可能として出力する。
【解決手段】画像を撮像する撮像装置であって、画像を撮像する撮像部と、撮像した画像から右眼用の画像および左眼用の画像を生成する画像生成部と、右眼用の画像および左眼用の画像を記憶装置に書き込む書込部とを備える撮像装置および撮像方法を提供する。前記書込部は、右眼用の画像および左眼用の画像を、着脱可能な前記記憶装置に書き込んでもよい。また、前記画像生成部は、撮像した画像を左右にずらした右眼用の画像および左眼用の画像を生成してもよい。
(もっと読む)
撮像装置、複眼撮像装置及び撮像制御方法
【課題】手振れ補正機能を用いてユーザによって好ましいと感じる立体画像を取得する。
【解決手段】複数の撮影手段毎に検出した振れに応じて撮影レンズから撮像素子に至る光路を変更して撮影画像に対する振れの影響を補正する手振れ補正手段を備えた撮像装置において、撮像手段ごとに手振れ補正手段を制御することにより輻輳角を変更しならが順次画像を撮影して複数の画像を取得し、ユーザが好ましいと感じる立体画像を選択可能とする。
(もっと読む)
立体映像表示装置および立体映像表示方法
【課題】1次元IP方式において、処理速度を犠牲にせず、容易に視域が再調整されることを可能にする。
【解決手段】表示面内に画素がマトリクス状に配列され、要素画像を表示する要素画像表示部331と、要素画像表示部に対向して設置され、略垂直方向に直線状に延びるとともに略水平方向に周期的に並ぶ光学的開口部を有し、要素画像表示部からの光線を制御する光線制御素子332と、入力画像データにおける各要素画像の平均幅と、出力立体映像における最適な各要素画像の平均幅に基づいて、不足する画像データ部分を同一要素画像内の隣接視差成分によって置き換えるように画像データを変換する画像データ変換部と、を備えている。
(もっと読む)
ステレオカメラの調整装置
【課題】カメラの位置ズレの検出処理に要する時間を短縮可能なステレオカメラの調整装置を提供する。
【解決手段】算出部21bは、カメラ12によって調整用画像50を撮像して得られた画像をリファレンス画像とし、カメラ13によって調整用画像50を撮像して得られた対象画像をリファレンス画像に対して移動させながら、対照画像の位置毎に、2つの重なり合う調整用パターン51a,52aの外形の面積を算出する。位置検出部21bは、各位置の面積値を比較することによって、面積値が最も小さくなる最小位置を検出する。制御部21は、駆動装置23を制御して、前記最小位置に、カメラ13を最小位置に移動させて位置ズレの調整を行う。
(もっと読む)
立体視用画像撮影方法
【課題】立体視に用いられる映像の撮影は、多視点、多眼に行うことが望ましい。ところが、現実のカメラ・レンズの幅の制約により、狭ピッチで撮影することに限界があった。
【解決手段】カメラ・レンズを「W」字型に配列する。カメラ・レンズの幅の制約を受けずに、狭ピッチの撮影が実現する。
(もっと読む)
ライトボックスの画像取り込み装置の自動線形移動、及び、傾斜角制御装置
【課題】ライトボックスの画像取り込み装置の自動線形移動、及び、傾斜角制御装置を提供する。
【解決手段】本発明のライトボックスの画像取り込み装置の自動線形移動、及び、傾斜角制御装置は、ライトボックス、線形移動ユニット、回転ユニット、及び、画像取り込み装置の固定座からなる。線形移動ユニットは、サーボモーター(Servo motor)、ボールネジ(Ball Screw)、線形スライドレール(Sliding Rail)、及び、スライドテーブル(Sliding Table)からなり、画像取り込み装置のライトボックス内の水平移動、及び、垂直移動を提供する。回転ユニットは、ステッピングモーター、ウォームギア、ウォーム歯車からなり、画像取り込み装置がライトボックスの側面に滑動する時の方向転換を提供すると共に、線形移動ユニットにより適当な撮影高度に滑動する時、画像取り込み装置を傾斜させて、被写体に照準させる。画像取り込み装置の固定座は、カメラを固定するもので、回転プラットフォーム上に配置する。
(もっと読む)
立体画像再撮影装置、立体画像奥行き変換装置およびそのプログラム
【課題】撮影装置に奥行きを制御するためのレンズを設けることなく、撮影装置で撮影した画像を用いて、立体画像の再生像の奥行き制御を行うことが可能な立体画像再撮影装置を提供する。
【解決手段】立体画像再撮影装置2は、要素画像群を表示する要素画像群表示部21aと、当該要素画像群表示部21aの表示面に開口部を平面状に複数配列した表示開口群21bとを備える表示手段21と、開口部を平面状に複数配列した撮影開口群22aと、要素画像群を撮影する要素画像群撮影部22bとを備える撮影手段22とを、所定距離を隔てて対面させ、表示手段21と前記撮影手段22との間に、要素画像が立体画像として表示される際の奥行きを制御する奥行き制御レンズLを備えていることを特徴とする。
(もっと読む)
立体映像生成システム
【課題】 自然な奥行のある立体映像を生成すること。
【解決手段】 物体の実像を結像させるレンズと、撮像デバイスとで構成される立体映像撮像手段を持ち、物体までの距離に応じて撮像位置を異ならせることにより、物体までの距離に応じた複数の映像を得、得られた距離毎に異なる映像を個別に表示する映像表示デバイスを含む立体映像表示手段を持ち、物体の本来あるべき位置までの距離に応じて映像の表示位置までの距離を異ならせることにより、奥行のある立体映像を表示する事が可能となる。
(もっと読む)
立体画像表示装置及び方法
【課題】 視差画像が表示領域を食み出た場合に生じる違和感を低減させる。
【解決手段】 鑑賞者に対して仮想空間内に立体画像を視認させる立体画像表示装置であって、上記右目用画像あるいは上記左目用画像のいずれか一方の画像の一部が上記表示面上に規定された表示領域を食み出た場合に、上記一方の画像の一部に対応する他方の画像の一部が欠如された画像信号を上記画像表示手段に出力する視差画像処理部13を備える。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法、ステレオ画像再生装置、ステレオ画像再生方法、ステレオ画像シート、ステレオ画像処理用プログラム、ステレオ画像再生用プログラムおよびコンピュータ読み取り可能な記録媒体
【課題】ファイルのヘッダ情報に拠らずに画像の立体視再生を行うことができるとともに、壊れたり消失した立体視表示のためのヘッダ情報を復旧させることのできるステレオ画像処理装置を提供する。
【解決手段】ステレオ画像を構成する複数の主画像を入力する画像入力部1と、入力された複数の主画像に対する立体視表示制御のためのステレオ情報をバーコードのような画像に符号化するステレオ情報エンコード部6と、入力された複数の主画像と、ステレオ情報の符号化画像とを領域を区分して合成する画像合成部8とを具備する。
(もっと読む)
三次元画像表示用多視点画像の作成方法およびプログラム
【課題】 レンズシフトを持たないカメラを用いて歪みのない多視点画像を得る。
【解決手段】 基準となる注視点を含む単一の基準投影面に対し垂直な方向に同一の距離離間して設けられる複数の視点を基準投影面に平行な第1の方向に一定間隔で離間させるステップと、各視点に対応して基準投影面を含む平面である投影面上に、それぞれが基準となる注視点とは異なる、複数の視点の垂線の足となる複数の個別注視点を設けるステップと、複数の視点から取得する画像の前記投影面における領域である個別投影面の形状と面積を一定とし、複数の視点の最端に位置する2視点から取得される個別投影面のオーバーラップした領域に基準投影面が含まれるように個別投影面の形状とサイズを決定するステップと、各視点から取得された個別投影面から基準投影面の領域だけ切り出して三次元画像表示用多視点画像とするステップと、を備えている。
(もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 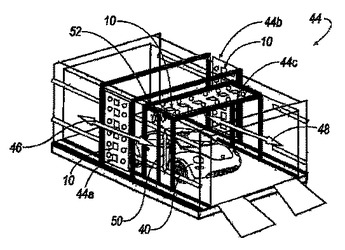 (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]