
Fターム[3B150GD26]の内容
Fターム[3B150GD26]の下位に属するFターム
針板 (10)
Fターム[3B150GD26]に分類される特許
1 - 20 / 51
ミシン
【課題】縫い代を安定して検出する。
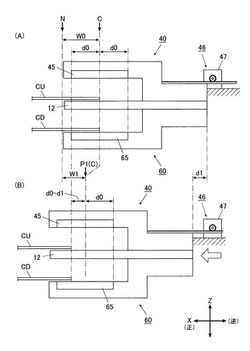
【解決手段】被縫製物を交差方向送る主送り機構20と横送り機構と、被縫製物の縫い代を検出する端部検出装置40,60と、縫い代が目標値となるように横送り機構を制御するミシン100において、端部検出装置は、光源と、複数の受光部が被縫製物幅方向に沿って複数並んで設けられ、被縫製物の側端部により遮蔽された照射光から当該被縫製物の側端部の被縫製物幅方向の位置検出を行う検出素子45,65とを有し、端部検出装置を被縫製物幅方向に沿って移動させるアクチュエータ47,67と、縫い代の目標値の変化に応じて、アクチュエータの移動制御を行う制御部13とを備えている。
(もっと読む)
ミシン及びミシンの制御方法

【課題】主軸と布送り機構を別のモータで駆動する場合に、主軸と布送り機構の同期が乱れた状態で縫製を行うことを防止できるミシン及びミシンの制御方法を提供する。
【解決手段】ミシンは、主軸を駆動するメインモータと布送り機構を駆動する布送りモータを備える。ミシンはメインモータ及び布送りモータの出力軸の回転角を取得する(S51、S56)。ミシンは、メインモータの回転角と布送りモータの回転角が同期するように2つのモータを駆動する。ミシンは、メインモータの回転角に対応して布送りモータの出力軸が位置すべき目標回転角を、メインモータの回転角から算出する(S57)。ミシンは、算出した目標回転角と、実際の布送りモータの回転角の偏差を算出する(S58)。算出した偏差が閾値よりも大きい場合(S59:NO)、ミシンは2つのモータが同期していないことを報知する(S61)。
(もっと読む)
ミシン
【課題】ミシンベッドが大型化することなく、縫製の不具合を早期に検知できるミシンを提供する。
【解決手段】ミシン1は、加工布を載置するミシンベッド2と、ミシンベッド2の内部に設けられ加工布を所定の送り方向に移動させる布送り機構と、ミシンベッド2に設けられ加工布の下面の第一範囲を撮像する第一撮像手段と、加工布の下面の第一範囲とは異なる第二範囲を撮像する第二撮像手段とを備え、第一撮像手段および第二撮像手段により撮像された送り方向に移動する加工布の下面のそれぞれの画像を合成し、合成された合成画像を表示部7に表示する。
(もっと読む)
ミシン
【課題】簡易な構成で送り台の移動原点への位置決めを容易に行う。
【解決手段】上下動する縫針を有し布地を縫製する駆動力伝達機構や針棒上下動機能と、布地を載置する移動体52と、移動体52を直交するX方向とY方向で移動させる布送り装置30と、を備えたミシン1において、布送り装置30は、Y方向に沿った移動体52の移動に対応して複数位置で原点信号を検出するY軸エンコーダ70を備え、Y方向においてY軸エンコーダ70が原点信号を検出する複数位置のいずれか1つを当該Y方向におけるY基準位置に設定し、移動体52が、Y基準位置上でX方向に沿って移動した際に、当該移動体52のX方向におけるX基準位置への到達を検出できるX軸原点センサ71を備える。
(もっと読む)
ミシンシステム、押え足収納装置、及びミシン
【課題】複数種類の押え足を保管すると共に、ユーザが選択した模様の縫製に適した押え足を、間違うことなく取出すことを可能とする。
【解決手段】ミシンベッドに装着される補助テーブル23に、縫製する模様に応じて使い分けられる5種類の押え足13を収納する押え足収納装置3を一体的に組込む。5個の収納室28を並んで備える箱状収容部29の上面に、1つの収納室28を開放させる窓部31aを有するカバー部材31を、駆動モータ等により移動可能に設ける。ミシンの制御装置は、ユーザにより模様が選択されると、その模様の縫製に適した押え足13が収納されている収納室28を決定し、当該収納室28の上方に窓部31aを移動させるように開閉機構30を制御する。
(もっと読む)
ミシン
【課題】イサリ量を低減する。
【解決手段】搬送される上布CUと下布CDの終端部をそれぞれ検出する上布と下布の検出手段91、81と、送られる上布のみを押圧する上布送り調節機構9と、送られる下布のみに押圧力を付与する下布送り調節機構5と、布送り機構の送り量と各検出手段の検出タイミングとによりイサリ量を算出する終端部位置算出部51と、イサリ量とそのイサリ量を生じた時の上布と下布の押圧力の差とを対応づけて記録する記録部54と、記録部の二以上の縫製によるイサリ量と上布と下布の押圧力の差との記録から適正な上布と下布の押圧力の差を求め、それ以降の縫製時に適正な上布と下布の押圧力の差を生じるように上布送り調節機構又は下布送り調節機構とを制御する調節制御部51とを備えている。
(もっと読む)
ミシンのアンダーカバー及びミシン
【課題】ミシンのペダルレバー、ペダルセンサをアンダーカバーに配置しても、ミシン操作者の身体に触れることを防ぐようにする。
【解決手段】アンダーカバー200は、ペダル30に連結した連結棒31の上下動をペダルセンサ32に伝達するリンク機構40とペダルセンサ32を、アンダーカバー200の後側の側面251に設けている。これにより、例えば当該リンク機構40をアンダーカバー200の下部に設けた制御ボックスに設ける構造に比べ、リンク機構をより上方に配置することができるので、リンク機構40が作業者の脚に干渉するのを抑制し、作業者の作業性を更に向上することができる。
(もっと読む)
ミシン
【課題】上糸保持動作の動作中に主軸の回転速度が急激に変化すると上糸保持装置の上糸の端部の保持量が変化する。
【解決手段】S10において、主軸回転角度AがA3と等しい場合(S10;Yes)、制御装置は、速度変更フラグF1を1にし(S16)、上糸保持用パルスモータの回転角度BがB0と等しいか否かを判定する(S17)。上糸保持用パルスモータの回転角度BがB0と等しい場合(S17;Yes)、制御装置は、ミシンモータの回転速度の変更を禁止する。それ故、主軸は現在の回転速度を維持したままS12へ移行する。一方、上糸保持用パルスモータの回転角度BとB0とが等しくない場合は、(S17;No)、制御装置は、設定値に示す主軸の回転速度になるように、ミシンモータの回転速度を変更することで主軸の回転速度を変更する。
(もっと読む)
ミシン
【課題】少ないセンサの数でケバによる縫い品質の低下を抑止する。
【解決手段】針板14上の被縫製物C1,C2に下方から接して送り動作を行う送り歯1と、被縫製物に上方から接する押さえ足2と、送り歯による送り方向に交差する方向について被縫製物の縫い目に沿った端部の位置を移動調節する端部調節機構と、被縫製物の端部が所定位置にあるか否かを検知する検知手段43と、被縫製物の端部と縫い目とが平行となるように検知手段による検知結果に基づいて端部調節機構の調節駆動源4,8を制御する制御手段13と、を備えるミシンにおいて、制御手段は、検知手段の被縫製物の端部の検知状態が継続する送り距離に基づいてケバの有無を判定し、判定結果に基づいて調節駆動源による調節動作を実行するという構成を採っている。
(もっと読む)
上下送りミシン
【課題】縫い形状、布の種類が変化しても、縫い代を安定させることができ、縫製品質を向上させること。
【解決手段】上下送りミシン100において、各押圧手段6,10は、通電した電流量に応じて各ローラ3,7を介して被縫製物に対する押圧力が調節自在とされ、被縫製物の縫製の際に、各ローラの被縫製物に対する押圧力を軽減する縫製位置を指定する指定手段80と、指定手段により指定された縫製位置において、各ローラによる押圧力を指定された押圧力にするように各押圧手段に通電する電流量を制御する押圧力制御手段13と、を備える。
(もっと読む)
ミシン及び糸調子調整プログラム
【課題】糸調子の判定及び調整を自動で行うことが可能なものにあって、糸調子の判定の正確性を十分に高いものとし、糸調子の調整を良好に行う。
【解決手段】縫目形成直後の加工布の縫目を、上面(表面)側から撮影する第1のカメラ39を頭部5に設けると共に、加工布の縫目を下面(裏面)側から撮影する第2のカメラ40をミシンベッド2に設ける。ミシン本体1の制御装置は、糸調子調整プログラムの実行により、加工布の縫目の糸調子の判定及び自動調整の処理を次のように行う。カメラ39,40により、加工布の表面側及び裏面側の双方から撮影された縫目の画像データを夫々取込み、それら画像データから交絡点に現れた反対側の糸の領域を抽出する。抽出した糸の領域の面積を算出し、糸調子率を判定する。その判定結果に基づいて、糸調子調整機構の糸調子調整用パルスモータを制御する。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、目飛びなどの糸条の走行異常の発生を非接触で確実に検知することができる装置を提供することにある。
【解決手段】本発明の走行監視装置10は、繊維機械12で使用される針糸14aと下糸14bの両方の走行を監視する。各糸条14a,14bに対してセンサー16a,16bが設けられる。センサー16a,16bには、光源18a、18bと差動型空間フィルタ素子20a,20bが含まれる。第1センサー16aの差動出力と第2センサー16bの差動出力は、糸条14a,14bの走行の有無を判定するための信号処理回路26に入力され、処理される。
(もっと読む)
玉縁縫いミシン
【課題】スタッカ装置により短時間で布を確実に引き出して綺麗に積み重ねること。
【解決手段】一方の大押さえ41Aを布排出方向Dに移動自在に支持すると共に、昇降機構43による各大押さえ41A、41Bの昇降動作の支点となる大押さえ支軸42aと、一方の大押さえに連結され、駆動により一方の大押さえを大押さえ支軸に沿って移動させるスライド機構42a,48,150と、を備え、制御手段60は、コーナーメス機構90による切れ目の形成後、昇降機構を動作させて他方の大押さえ41Bを上昇させ、次に、スライド機構を動作させて一方の大押さえをスタッカ装置200に向けて移動させ、次に、昇降機構を動作させて一方の大押さえを上昇させ、次に、スタッカ装置を動作させる。
(もっと読む)
下糸残量検知装置
【課題】下糸の残量を確実に検知することのできる下糸残量検知装置を提供する。
【解決手段】反射型光センサ2と、ボビン3の下糸Sが巻回される軸3aの外周面の一部に配設された光反射部4と、各部の動作の制御を司るための制御手段5とを設けるとともに、制御手段5は、反射型光センサ2が反射光を受光するオン状態の時間と、これに続く反射型光センサ2が反射光を受光しないオフ状態の時間とに基づいて下糸Sの残量検知を行うように形成する。
(もっと読む)
ミシン
【課題】ミシンの耐久性を高める。
【解決手段】被縫製物を保持する保持枠21を支持する送り台25と、第一の移動方向に移動可能とする第一のスライドガイド32と、第一のスライドガイドを第二の移動方向に移動可能とする第二のスライドガイド34と、第一及び第二の移動方向の駆動源となる固定設置された第一及び第二のステッピングモータ47,40と、第一のステッピングモータにより回転駆動を行うスプライン軸44と、スプライン軸と共に回転する回転体と、回転体を介して第一の移動方向の動作を送り台に付与する動作伝達手段と、第一のステッピングモータの出力軸又はスプライン軸により所定動作を付与される被検出体55と、被検出体の被検出部57を検出する固定設置された原点センサ56とを備え、被検出体の被検出部は、送り台の第一の移動方向の全範囲移動で一度だけ原点センサの検出位置を通過するように所定動作が付与される。
(もっと読む)
ミシンの下糸残量検出装置
【課題】より好適に下糸の残量を検出可能なミシンの下糸残量検出装置を提供する。
【解決手段】ミシンの下糸残量検出装置100は、ボビン1の透過性を有する軸部1aの内部に光を入射させる照明2と、ボビン1の軸部1aの軸方向について下糸Tが巻回される全ての範囲Wの輝度を検出するラインセンサ3と、ラインセンサ3の検出した輝度から下糸の残量を判定するCPU11と、下糸の残量が減少したと判定された場合にその旨を報知するための画面を表示する操作パネル20と、を備える。
(もっと読む)
ミシン
【課題】設定された縫目ピッチでフリーモーション縫いを行うことができると共に、ユーザが自分の技能に合わせて設定した縫製速度で、加工布の送りを適正に行うことができるミシンを提供する。
【解決手段】フリーモーション縫いにおいて、移動量ΔPと設定された縫目ピッチpとが比較され、移動台11の移動量ΔPが縫目ピッチp以上と判断した場合(ステップS23:Yes)に、X軸ブレーキモータ及びY軸ブレーキモータが同時に回転不能に制御される(ステップS24)。これにより、加工布を適正な送り出し量で移動させることができ、縫目のピッチ幅を揃えることができる。
(もっと読む)
ミシンの上糸つかみ装置
【課題】上糸の糸端部の先端側が生地裏の縫い目に縫い込まれて糸捕捉部を通るループが形成された場合でも、糸捕捉部からループを容易に外すことのできるミシンの上糸つかみ装置を提供する。
【解決手段】切欠き34およびこの切欠き34の開口を開閉可能に配設された開閉体35を具備する糸捕捉部33を備え、開閉体35のうちの切欠き34の開口を閉塞する部位により第1挟持部24が形成された第1挟持部材31と、第1挟持部24に対し相対的に接離可能に配設され第1挟持部24との間で上糸Tの糸端部TAを挟持する第2挟持部25を具備する第2挟持部材32とにより上糸挟持手段26を形成する。第1挟持部24は、上糸Tを挟持した後に、上糸Tによって糸捕捉部33を開状態とするように可動に形成する。
(もっと読む)
ミシン
【課題】複数の縫製モードを実行可能であって、縫製不良の発生を防止するとともに、効率的に下糸を使用し、下糸の無駄を防止する。
【解決手段】下糸9の残量を検出する光センサ15と、複数の縫製モードのうち所望の縫製モードを選択可能なタッチパネル25と、各縫製モードの実行に必要な必要下糸残量が各縫製モード毎に記憶されたROM29と、選択された縫製モードの縫製開始前に、光センサ15により検出された検出下糸残量が、選択された縫製モードに応じた必要下糸残量より少ないか否かを判断し、検出下糸残量が選択された縫製モードに応じた必要下糸残量より少ないと判断した場合には、表示部23、警告灯33、警告ブザー35により下糸9の残量不足を報知する制御手段27とを有する。
(もっと読む)
縫い外れ検出装置
【課題】本発明の目的は、生地の縫い外れを迅速正確に検出する検出装置を提供することにある。
【解決手段】検出装置10は、ミシン針20の近傍に設けられた第1のセンサ22aと、第1のセンサ22aよりも遠方に設けられた第2のセンサ22bと、を有する。第1のセンサ22aの出力と第2のセンサ22bの出力との差動出力をとる差動増幅回路30と、差動出力の値が予め設定しておいた閾値よりも大きければ縫い外れが発生したと判定する出力回路32と、を含む。両方のセンサ22a、22bの出力を差動増幅させる。
(もっと読む)
1 - 20 / 51
[ Back to top ]