
Fターム[3B150NC06]の内容
Fターム[3B150NC06]に分類される特許
161 - 180 / 317
ボタン穴かがりミシン
【課題】布切りメスで切開したボタン穴の周囲にボタン穴かがり縫目を形成するに際し、ボタン穴周囲の被縫布の繊維が解けたり抜けたりしないように、ボタン穴かがり縫目に補強のための縫目を形成する。
【解決手段】被縫製物に切開形成されるボタン穴の両側に沿う一対の側縫いと前記ボタン穴の少なくとも一端側に位置し両側縫いに連続する閂止めとによるボタン穴かがり縫目を形成する縫い形成手段を備えたボタン穴かがりミシンにおいて、
ボタン穴かがり縫目の形成前に、側縫い部よりも幅が狭いジグザグ縫い又は直線縫いで形成される補強縫いを複数回繰り返す重ね縫いを、針が同一点に落ちないように、前記側縫い及び両側縫いに連続する閂止めの形成位置に形成する制御手段を備える構成にした。
(もっと読む)
ボタン穴かがりミシン

【課題】布切りメスで切開したボタン穴の周囲にボタン穴かがり縫目を形成するに際し、ボタン穴周囲の被縫布の繊維が解けたり抜けたりしないように、ボタン穴かがり縫目に補強のための縫目を形成する。
【解決手段】被縫製物に切開形成されるボタン穴の両側に沿う一対の側縫いと前記ボタン穴の少なくとも一端側に位置し両側縫いに連続する閂止めとによるボタン穴かがり縫目を形成する縫い形成手段を備えたボタン穴かがりミシンにおいて、
ボタン穴かがり縫目の形成前に、側縫い部よりも幅が狭いジグザグ縫い又は直線縫いで形成される補強縫いを左右の側縫いの形成位置に形成し、これらの左右の補強縫いの開始点を、ボタン穴に直交する方向に対し設定可能とした制御手段を備える構成とした。
(もっと読む)
ミシン
【課題】構造が簡単で、製造コストが低く、且つ作動過程が精確な単一駆動源のミシンの提供。
【解決手段】単一の駆動モータを利用し、順に上糸保持装置及び糸切り装置を駆動するミシンであって、主に、ミシンの針板下方にベルクランク及び一組の複数本のリンク部材から構成されるリンク部材セットを設置し、ベルクランクが駆動ロッドに接続されて駆動モータに連動され、駆動モータが作動すると、順に上糸保持装置と糸切り装置を駆動することができる。
(もっと読む)
穴かがり縫いミシン
【課題】 形成される穴かがり縫い目の形状を微細に設定することのできる穴かがり縫いミシンの提供。
【解決手段】 本穴かがり縫いミシンでは、縫製機構及び送り台の制御によって形成される穴かがり縫い目の一対の千鳥縫い目の全体としての縫い目巾と、前後各閂止め縫い目の縫い目巾とを個々に設定することができる。この場合、セレクトキー431で設定されたプログラムモードにおいて、プログラムナンバキー421でパラメータの千鳥巾を選択した状態でアップダウンキー411により数値を増減することで千鳥縫い目の全体としての縫い目巾を変更することができる。また、プログラムナンバキー421でパラメータの前閂止め巾補正又は奥閂止め巾補正を選択した状態でアップダウンキー411により数値を増減することで前閂止め縫い目の縫い目巾又は奥閂止め縫い目の縫い目巾を変更することができる。従って、穴かがり縫い目70の左右のバランスを良好に調整することができる。
(もっと読む)
ミシン
【課題】糸の太さや布の厚さが異なってもメス幅を一定に形成すること。
【解決手段】ミシン1は、被縫製物の厚さを検出する検出手段5と、模様データを記憶する記憶手段85と、糸の太さを設定する設定手段71,72,73と、模様データを用いて被縫製物にボタンホール縫いを行う制御手段8と、を備え、各模様データは、ボタンホール幅及びメス幅が一定で、左右の側縫い幅がそれぞれ異なるデータとされ、記憶手段には、縫製に用いられる糸の太さに応じた模様データ及び押さえにより押さえつけられる被縫製物の厚さに応じた模様データがそれぞれ記憶され、糸の太さが設定された場合に、検出された被縫製物の厚さに対応した模様データに優先して設定された糸の太さに対応した模様データを選択する選択手段を有し、制御手段は、選択された模様データを用いてボタンホール縫いを行う。
(もっと読む)
布送り制御装置
【課題】
よりスムーズにしつけ縫いを行うことのできる布送り制御装置を提供すること。
【解決手段】
上軸8を回転させるミシンモータ2と、布を送るための送り歯11を上軸8の回転に同期して動作させる水平送りモータ3/上下送りモータ4と、上軸8の回転数及びその位相角を検出する回転数検出装置5と、水平送りモータ3/上下送りモータ4および回転数検出装置5と接続され、送り歯11を複数回連続して動作させるべく、上軸8の回転数に応じて水平送りモータ3/上下送りモータ4を制御するCPU6と、を布送り制御装置1が備える構成としたこと。
(もっと読む)
穴かがり縫いミシン
【課題】 2重縫いを実行する場合に、既に縫い目を形成している上糸を切断することのない穴かがり縫いミシンの提供。
【解決手段】 本穴かがり縫いミシンでは、縫製機構及び送り台の制御によって左右の千鳥縫い目と前後の閂止め縫い目とから成る穴かがり縫い目を形成することができる。そして、上記穴かがり縫い目の縫い始め及び縫い終わりを一方の閂止め縫い目に配設することにより、その閂止め縫い目を上記縫製機構に2重縫いさせる場合、縫い始め側の針落ち点と縫い終わり側の針落ち点とをずらして配設する。従って、2重縫いを実行する場合に、既に縫い目を形成している上糸を切断することがない。
(もっと読む)
ミシン
【課題】 送り歯の送り量を補正する補正値を自動で設定可能なミシンを提供する。
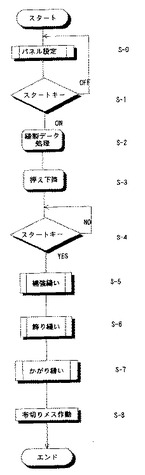
【解決手段】 送り補正値設定模様が選択されたら(S1)、縫製を開始し(S2)、まず後進送りで地縫い部の縫製を実行する(S3)。第一スイッチがオンとなったら(S4:YES)、反転して前進送りで地縫い部の縫製を行う(S5)。第二スイッチがオンで(S6:YES)、前進・後進の針数カウンタを初期化して「0」にする(S7)。次に、後進送りで針数をカウントしながらジグザグ縫製し(S8、S9)、第一スイッチがオンで(S10:YES)前進送りに切り替えて針数をカウントしながらジグザグ縫製する(S11、S12)。第二スイッチがオンとなったら(S13:YES)縫製を終了し(S14)、前進・後進の針数カウンタ値から補正値を算出して記憶する(S15)。
(もっと読む)
ミシンの糸切断装置
【課題】縫い糸を適切な長さに切断する
【解決手段】糸切り機構100は、糸捕捉部111を有し針板8の下方で進退移動して縫い糸Tを捕捉する第一糸捕捉体110と、糸捕捉部121を有し第一糸捕捉体110により捕捉されることで針穴9と糸捕捉部111との間に掛け渡された縫い糸Tを捕捉して固定刃150に案内し切断する第二糸捕捉体120と、第一糸捕捉体110による捕捉動作の後に第二糸捕捉体120による捕捉動作と切断動作とを行わせる動作装置200とを有する。そして、縫い糸Tを捕捉して最後退位置に後退した第一糸捕捉体110の糸捕捉部111と針穴9との間に掛け渡された縫い糸Tを、さらに第二糸捕捉体120で捕捉して固定刃150に案内して切断することで、該切断後に布側に残る縫い糸Tの残端長さを従来よりも短縮し、且つ、切断後にミシン1側に残る縫い糸Tの残端長さを従来より長く確保することができる。
(もっと読む)
ミシンの下糸張力制御装置
【課題】ユーザの望むタイミングで下糸に適切な大きさの張力を与えること。
【解決手段】ミシンの下糸張力制御装置1は、ボビンケースCの内周又は外周への接離により下糸Tへの張力を付与又は解放する磁性体から形成された糸調子バネ7に対向するように配置され、磁力により糸調子バネを動作させる動作体10と、動作体を所定の軸線回りに回転させる回転駆動装置と、回転駆動装置による動作体の初期位置からの回転角度を制御する回転制御装置と、を備え、動作体は、糸調子バネを磁力により当該動作体に向けて引く磁石11と、所定の軸線を通る直線を挟んで対向する位置で磁石に設けられた磁性体12と、を有する。
(もっと読む)
ミシン
【課題】ボタンホール縫いを行うミシンを用いながらも必要な長さだけかん止め縫いを自動で行うことができ、かん止め縫いを一定の長さで実現する。
【解決手段】ミシン10は、縫いの種類がかん止め縫いであるか否かを判断するかん止め縫い判断手段3と、縫いの種類がボタンホール縫いであるか否かを判断するボタンホール縫い判断手段3と、かん止め縫いである場合に、ボタン径にかん止め縫い補正値を加算してかん止め縫いに必要な縫製長さを算出するかん止め長さ算出手段3と、ボタンホール縫いである場合に、ボタン径にボタンホール縫い補正値を加算してボタンホール縫いに必要な縫製長さを算出するボタンホール長さ算出手段3と、算出された縫製長さのかん止め縫い又はボタンホール縫いを行うように針上下動機構、送り機構及び針振り機構の駆動を制御する制御手段3と、を備える。
(もっと読む)
ミシンの布押え装置
【課題】最適な押圧力を被縫製物に与える布押え装置を提供する。
【解決手段】ミシンの布押え装置10は、被縫製物を押圧することで保持する布押え21を備えた布押え機構20と、内部にエンコーダを備えたステッピングモータ13と、ステッピングモータの駆動力を布押え機構に伝達する動力伝達機構50と、ステッピングモータ13を制御する制御装置と、を備え、制御装置は、布押えが被縫製物に加える押圧力の設定値を記憶する記憶部と、制御装置によって設定されたステッピングモータの予定パルス位相とエンコーダによって出力された実際の位相から押圧力を算出する演算部とを備える。
(もっと読む)
ミシン駆動装置
【課題】ステッピングモータの停止時における鉄損によるモータの温度上昇を押さえることができ、消費電力の低減も図ることのできるミシン駆動装置を提供すること。
【解決手段】被駆動部を駆動するステッピングモータであって、前記被駆動部を動作させる場合に高い電流を通電し、前記被駆動部を停止させる場合に低い電流を通電して駆動するステッピングモータを備えたミシン駆動装置において、前記電流をPWM周期をもって通電するとともに、当該PWM周期を高い電流を通電する場合と低い電流を通電する場合とにおいて可変制御する制御手段を有することを特徴とする。
(もっと読む)
ミシンの布切断装置
【課題】縫製作業中であっても動メスの上下動ストロークを調整可能なミシンの布切断装置を提供する。
【解決手段】ミシンの布切断装置は、針板に固定された下メス9と、針板上部に延出すると共に上下動することで下メスとその刃部同士が摺動するように配置された動メス8と、ミシンモータによって回転する主軸2の回転運動を上下方向の往復運動に変換して動メスに伝達するメス駆動カム4、メス駆動ロッド5、揺動腕7及び調整部20とを備え、調整部は、パルスモータの操作により動メスの上下動ストロークを調整可能とする。
(もっと読む)
ミシン
【課題】糸の太さに応じてパルスモータの出力トルクを変化させることができ、糸切り不良を抑制することができるミシンを提供すること。
【解決手段】ミシン100は、糸切り機構1と、パルスモータ2と、パルスモータに指令パルスを入力するパルス出力手段41と、パルスモータに入力される指令パルスを検出する指令パルス検出手段42と、パルスモータからの出力パルスを検出する出力パルス検出手段3と、検出された指令パルスと出力パルスの位相差を算出し、この位相差を負荷トルクとして算出する負荷トルク算出手段43と、パルスモータにかかる負荷トルクの閾値を記憶する太さ判断用閾値記憶手段44と、算出された負荷トルクが記憶された負荷トルクの閾値よりも大きい場合に、パルスモータの駆動速度を減速させるとともに出力トルクを増加させる駆動制御手段45と、を備える。
(もっと読む)
ミシン及びミシン制御プログラム
【課題】練習の縫製を行った後に本番の縫製を行うミシンを提供する。
【解決手段】縫製開始スイッチが押下されると縫製処理が行われる。まず縫製準備が行われ(S21)、縫製停止スイッチが操作されず(S22:NO)、練習モードである場合(S23:YES)、合計針数Sが0であるか否かにより記録が行われていないかの判断が行われる。合計針数Sが0で縫目がまだ記録されていなければ(S24:YES)、記憶縫製制御処理が行われる(S25)。繰り返しS22〜S25の処理が行われ、縫目履歴テーブルに縫目の座標情報が記憶される。そして、縫製停止スイッチが押下されたら(S22:YES)、縫製停止の処理が行われる(S31〜S36)。また、合計針数Sが0でなければ縫目の記録が行われているので(S24:NO)、履歴再生縫製制御処理が行われる(S26)。繰り返しS22〜S24,S26の処理が行われ、記録された縫目が再現される。
(もっと読む)
刺繍枠の支持機構
【課題】キャリッジによる刺繍枠の支持力を強固にし、キャリッジに対する刺繍枠のがたつきを抑制すること。
【解決手段】外枠と内枠を有する刺繍枠50と、ミシンベッドの上面において一方向に往復移動可能に支持されたキャリッジに設けられた支持部62と、刺繍枠に設けられ、支持部に着脱自在に装着される装着部53と、を備える刺繍枠の支持機構100において、装着部は、支持部との接触部位に少なくとも一つのテーパ部53a,53bを有し、支持部は、装着部が嵌め込まれる嵌込部70aが形成された土台部70と、少なくとも一つのテーパ部53bの全面にわたって当接するテーパ面71aが形成され、テーパ部に対して接離可能な爪部71と、爪部をテーパ部に接近する方向に付勢する付勢部と、爪部をテーパ部から離間する方向に移動させるレバー部73と、を有する。
(もっと読む)
電動式ミシン
【課題】 糸払い時に生じる生地と上糸との摩擦抵抗に応じた適切な駆動力で糸払い機構の駆動源を駆動させ、縫製終了時の糸払いを確実に実行することができる電動式ミシンを提供する。
【解決手段】 制御部100は、ワイパー61の揺動時にパルスモータ65にかかる回転負荷を監視し、適宜、パルスモータ65の駆動を、低トルクで高速駆動する高速糸払いモードから、高トルクで低速駆動する低速糸払いモードへ切換える機能を備える。
(もっと読む)
ミシン
【課題】 縫針を左針落ち位置と右針落ち位置とに針振りさせながら縫製する場合に、確実に目飛びを防止できるようにすること。
【解決手段】 上軸プーリ42aとこれにスプライン結合された上軸用カム体47とが上軸23に外装され、上軸23を挿通した伝達ピン46が上軸用カム体47に形成された傾斜状のカム溝49に係合している。位相変更モータ55に固着した作動レバー56の先端部に固着した係合ピン54が上軸用カム体47の環状溝53に係合している。縫針が右針落ち位置NRのときであって右側出会いタイミングに際して、位相変更モータ55の駆動で作動レバー56が左方へ揺動して上軸用カム体47が左方に移動するので、ベルト伝動機構43を介して、上軸23の回転位相に対する下軸41の回転位相が遅くなり、右側出会いタイミングが遅れ側へ調整される。
(もっと読む)
ミシンおよび糸調子調整制御プログラム
【課題】糸駒が備える無線タグが記憶する上糸情報と、下糸ボビンが有する無線タグが記憶する下糸情報とに基づいて、糸調子を自動調整するミシンおよびプログラムを提供する。
【解決手段】本発明のミシンの自動糸調子制御では、縫製対象となる模様ごとに予め設定された上糸張力値に基づいて、選択された模様の上糸張力デフォルト値Mを設定する(S21)。次いで、選択された模様と上糸情報リーダによって糸駒の無線タグから読み取られた上糸の種類とに基づいて、上糸情報に基づく補正係数Pを設定する(S22)。さらに、下糸情報リーダによってボビンの無線タグから読み取られた下糸の種類に基づいて、下糸情報に基づく補正係数Sを設定する(S23)。そして、設定された補正係数P、Sを用いて、上糸張力デフォルト値Mを補正し(S24)、補正後の上糸張力値Xに基づいて、糸調子調整用パルスモータを制御する(S25)。
(もっと読む)
161 - 180 / 317
[ Back to top ]