
Fターム[3B150NC06]の内容
Fターム[3B150NC06]に分類される特許
121 - 140 / 317
ミシン
【課題】 持上げ装置とリフト位置調節装置とを設計する労力を低減させるミシンを提供する。
【解決手段】 ミシンは、縫っている間縫い生地を押さえつけるための少なくとも1つのソーイングフット(10)を有している。持上げ装置(13)はソーイングフット(10)を持上げるために機能する。リフト位置調節装置(30)はソーイングフット(10)の送りリフトを設定するために機能する。持上げ装置(13)とリフト位置調節装置(30)とは、共通の駆動装置(22)を有している。以上により、持上げ装置とリフト位置調節装置とを設計する労力が低減されるミシンをもたらす。
(もっと読む)
布切り装置

【課題】メスとメス受け部との間隔が広がったとしてもサイクルタイムの短縮化を図る。
【解決手段】布切り装置の制御部は合致位置検出モードと布切りモードとを実行可能である。合致位置検出モードは、メスとメス受け部とを原点位置から接近させる際、パルスモータのパルス数をカウントしながら、パルスモータを所定速度で回転させて、メスとメス受け部とを接近させ、回転量検出部からの検出結果とパルスモータの入力パルスとに偏差が生じると、パルスモータを停止させ、当該停止時のカウント値を合致パルス数として記憶する。布切りモードは、パルスモータのパルス数をカウントしながら、当該カウント値が合致パルス数になるまではパルスモータを第1設定速度で回転させ、カウント値が合致パルス数から所定パルス数まではパルスモータを第1設定速度よりも低速な第2設定速度で回転させて、メスとメス受け部とを接近させ布を切断する。
(もっと読む)
ミシンの下糸制御装置
【課題】ミシンを大型化することなく、下糸の張力を調整する際に内釜からボビンケースを取り出さずに、容易かつ正確に下糸の張力を調整する。
【解決手段】ボビン2を押圧するケース型アクチュエータ13、ケース型アクチュエータ13をボビン2に対して進退移動してボビン2に対する押圧力を調整する制御を行う制御回路23、外部からの通信信号を受信する外部インターフェース回路36、および内釜5および外釜6の外側に露出される外部受電回路33を備えた下糸張力制御ユニット11と、外釜6の外部に配置され、外釜6の非回転時に外部受電回路33および外部インターフェース回路36に接触する接触位置と外釜6の回転時に外釜6から離間する退避位置との間を移動し、外部受電回路33に接触して下糸張力制御ユニット11に電力を供給し、外部インターフェース回路36に接触して制御回路23にケース型アクチュエータ13の位置に関する信号を送信するプローブ38とを備える。
(もっと読む)
ベルトループの供給装置
【課題】より好適にベルトループを供給可能なベルトループの供給装置を提供する。
【解決手段】ベルトループの供給装置1は、繰り出し機構10と、引出し機構20と、
繰り出し機構10の駆動源としてのモータ12と、引出し機構20の駆動源としての第2のモータと、モータ12の回転角度を検出するエンコーダ12aと、モータ23の回転角度を検出するエンコーダ23aと、モータ12及びモータ23へのそれぞれの指令角度とエンコーダ12a、23aによって検出された回転角度との偏差を算出し、当該偏差に基づいてテープ材Tの繰り出し量が適切か判定して、適切でない場合はモータ12、モータ23の少なくとも一方のモータを駆動制御してテープ材Tの繰り出し量を適切に調節する制御装置40のCPU41と、を備える。
(もっと読む)
ミシンの上糸保持機構
【課題】縫製初期における上糸の保持力を適正な値とすることで、糸抜けを防止しつつ被縫製物のしわの発生や糸端部の上糸ループへの巻き込みを抑制できるミシンの上糸保持機構を提供する。
【解決手段】針板12の下面に設けた第1糸保持板21と、針孔12aを貫通した縫針11が通過する糸孔22bを備え、第1糸保持板21の下方において、第1糸保持板21に対して相対移動可能に設けた第2糸保持板22とを有し、縫製開始にともない、縫針11が糸孔22bを貫通するように第2糸保持板22を糸捕捉位置に移動し、縫針11が糸孔22bから離脱した後に第1糸保持板21に対して相対移動して、屈曲状の糸通過抵抗付与部Sを形成し、縫針11の目孔11aから下方に延びる上糸7の糸端を糸通過抵抗付与部Sに挿通保持する。
(もっと読む)
ミシン
【課題】縫製中の芯紐を安定させて、縫い目からのはみ出しや縫製中の詰まりを防止し、芯紐入りの鳩目縫いを美しく縫製する。
【解決手段】ボタン径から必要な縫製長さを算出すると共に、算出した縫製長さのボタンホール縫いを行う制御手段を備え、ボタンホール縫い目の形成の際に、当該ボタンホール縫い目を補強する芯紐Tをボタンホール縫い目の形成と共に被縫製物Cに縫いつけるミシンは、折り曲げられた芯紐Tの折曲部T1を保持する芯紐保持部Nと、押さえ枠22に形成され、折り曲げられた芯紐の各端部側を係止する芯紐係止部22dと、を備え、制御手段は、芯紐保持部で芯紐の折曲部を保持すると共に芯紐係止部で折り曲げられた芯紐の各端部側を係止した状態で、折曲部に最初に針落ちさせて被縫製物に鳩目ボタンホール縫い目を形成する。
(もっと読む)
ミシン及び縫製方法
【課題】加工布送りデータに基づいて加工布を送りながら模様縫製用の複数の針落穴を縫製進行方向に対して所定角度傾斜状に形成する穴開け装置を備えたミシンと縫製方法を提供する。
【解決手段】ミシンのアーム部に、セリエステッチ状の縫目形成用の針落穴を加工布に形成する鉛直な穴開け針22を保持する針保持体23と、この針保持体23を昇降駆動可能な昇降駆動手段24と、針保持体23を回動駆動可能な回動駆動手段25とを備えた穴開け装置20を設け、穴開け工程では針棒軸心に対する穴開け針の軸心のオフセット量を加味して加工布送りデータを補正した加工布送りデータに基づいて加工布を送りながら模様縫製用の複数の針落穴を形成し、縫製工程では加工布送りデータに基づいて縫製する。
(もっと読む)
ミシン
【課題】縫製の途中で異常が発生しても最初から縫製をやり直す必要がなく、被縫製物の傷みを防止し、作業効率を向上すること。
【解決手段】ミシン10は、縫製中に異常が発生した場合に、ミシン10の動作を停止させる入力を行うと共に送り量検出手段24により検出された異常発生時点での送り量と、縫製データから求まる針落ち位置と、を記憶させる旨の入力を行う指示入力手段90と、指示入力手段からの入力があった場合に、送り量と針落ち位置とを記憶する記憶手段32と、指示入力手段からの入力により縫製を中断した後、縫製を再開する旨の入力を行う再開入力手段91と、を備えている。そして、制御手段3は、指示入力手段からの入力があった場合に、送り量と針落ち位置とを記憶手段に記憶させると共に、再開入力手段からの入力があった際に、記憶手段に記憶された送り量と針落ち位置とに基づいて、縫製が中断した位置から縫製を再開させる。
(もっと読む)
帯状物の縫着方法
【課題】 簡易な方法で帯状物の切断端部を短くすることができる帯状物の縫着方法を提供する。
【解決手段】袋状生地70の開口周縁部71に伸縮性の帯状物Tを供給ローラ50,51対によって供給しながら開口周縁部71に帯状物Tを緊張状態で縫着する。縫着位置が開口周縁部71における帯状物Tの縫着終端部Tsに達したとき、前記帯状物Tの供給を停止した後、帯状物Tに供給方向と反対方向の引張り力を付与し、縫着終端部Tsの近傍で帯状物Tを切断する。
(もっと読む)
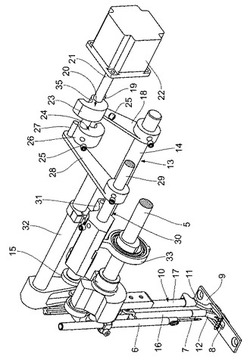
ミシンの天秤装置、ミシン、天秤ストローク変更用制御プログラム及び天秤ストローク変更用記録媒体
【課題】天秤の上下動ストロークを、予め設定した上下動ストロークに変更可能にすること、好ましくは縫製動作中に縫製条件に応じて天秤ストロークを調整可能にすること。
【解決手段】天秤支え軸18を偏心軸とし、この天秤支え軸18を回転駆動させて偏心軸中心位置を変更させるステッピングモータ28を設け、天秤16の上下動ストロークを変更可能に構成する。加工布の布厚、上軸2の回転速度、縫製データ、縫製開始からの針数、縫製終了前の針数に応じて夫々設定された天秤16の上下動ストロークのデータテーブルに基づいて、縫製動作中に、ステッピングモータ28を駆動制御し天秤16の上下動ストロークを変更する。
(もっと読む)
ミシンの糸切り装置
【課題】縫い糸を適切な長さに切断すること。
【解決手段】ミシンの糸切り装置(100)は、待機位置と前進位置との間を移動する第1糸捕捉部材(110)と、第1糸捕捉部材を待機位置と前進位置に案内するガイド溝(252)と、固定刃(150)と、針孔と第1糸捕捉部材との間に架け渡された縫い糸を捕捉して、固定刃と協働して縫い糸を切断する第2糸捕捉部材(120)と、第1糸捕捉部材の捕捉動作の後、第2糸捕捉部材を駆動させる動作装置と、を備え、ガイド溝(252)は、第1糸捕捉部材を前進位置から捕捉位置に向けて案内する第1案内部(252b)と、第1案内部に連続して形成され、第1糸捕捉部材を待機位置に向けて案内すると共に、第1案内部を基準に、第2糸捕捉部材側から離間する方向に形成された第2案内部(252a)と、を有する。
(もっと読む)
ミシン
【課題】設定された縫目ピッチでフリーモーション縫いを行うことができると共に、ユーザが自分の技能に合わせて設定した縫製速度で、加工布の送りを適正に行うことができるミシンを提供する。
【解決手段】フリーモーション縫いにおいて、移動量ΔPと設定された縫目ピッチpとが比較され、移動台11の移動量ΔPが縫目ピッチp以上と判断した場合(ステップS23:Yes)に、X軸ブレーキモータ及びY軸ブレーキモータが同時に回転不能に制御される(ステップS24)。これにより、加工布を適正な送り出し量で移動させることができ、縫目のピッチ幅を揃えることができる。
(もっと読む)
ミシン
【課題】加工布に対する刺繍模様の縫製場所を容易に設定して縫製を行うことが可能なミシンを提供する。
【解決手段】刺繍模様の縫製を行う加工布に対して、配置位置及び配置角度が認識可能な標識がユーザにより貼付される。次に、ミシンのイメージセンサが加工布を撮影し(S15:YES)、あらかじめユーザにより特定されている標識の貼付領域について、標識の認識処理が実行される(S19)。標識が認識された場合は(S20:YES)、特定した標識の配置位置と配置角度とに基づいて、刺繍模様の座標情報を変換し(S21)、刺繍模様の縫製場所を特定する。そして、特定した縫製場所が加工布を保持する刺繍枠の縫製エリアからはみ出さないことを確認し(S23:NO)、刺繍模様の縫製が実行される。
(もっと読む)
ミシン
【課題】布移動機構の動作に遅れを生じさせないミシンを提供する。
【解決手段】ミシン1は、針棒と、上下動機構と、ミシンモータ41と、布移動機構と、布移動機構を駆動するX軸モータ21及びY軸モータ23と、X軸モータの回転角度を検出するX軸エンコーダ22と、Y軸モータの回転角度を検出するY軸エンコーダ24と、X軸モータ21及びY軸モータ23のフィードバック制御を行うメイン制御コントローラ10と、ミシンモータ41の制御を行うミシンモータ速度制御コントローラ30とを備え、メイン制御コントローラ10はX軸モータ21の必要トルクT2及びY軸モータ23の必要トルクT3に応じてミシンモータ41の指令速度V1を加減算する。
(もっと読む)
ミシンの針棒搖動機構
【課題】複雑な構成とならずかつコストアップも抑えられて、ガタつきがなく高速でかつ精度よくジグザグ縫いができるミシンの針棒搖動機構を提供する。
【解決手段】本発明のミシンの針棒搖動機構は、針棒21と、針棒21を上下可能に保持する針棒腕22と、針棒腕22に一端が保持されるリンク7と、リンク7の他端に連接しリンク7を介して針棒21を左右方向に搖動させるモータ8と、針棒21が搖動する左右方向の一方向に針棒腕22およびリンク7を付勢する付勢部材24と、付勢部材24による付勢力に対抗する他方向に針棒腕22およびリンク7を付勢する補助付勢部材9と、を有することを特徴とする。
(もっと読む)
ボタン穴かがりミシン
【課題】芯糸の抜けを抑止する縫いを行う。
【解決手段】針棒を上下動させる上下動機構20と、針棒を揺動させる針振り機構30と、針棒との協働により加工布に縫い目を形成するルーパ機構40と、加工布を水平面に沿って移動させる移動機構70と、芯糸の端部を針振り縫い目の間に案内する芯糸案内手段90と、ボタン穴かがり縫い目を形成するための縫製データを記憶する記憶手段107と、縫製データに基づいてボタン穴の周囲に穴かがり縫い目を形成する制御を行う制御手段100とを備えている。
そして、制御手段は、縫い開始端部に、針棒の針振り幅又は前記ボタン穴に沿った縫いピッチの少なくともいずれか一方を他の縫い区間よりも狭くして縫いを行う芯糸保持区間Hを形成する制御を行う。
(もっと読む)
玉縁縫いミシンの玉布押さえ機構
【課題】玉布の生地厚に関らず好適に機能する玉縁縫いミシンの玉布押さえ機構を提供する。
【解決手段】玉布押さえ機構20は、水平板22aと垂直板22bとを有するバインダー22と、アーム25aによって回動可能に設けられて水平板22aの上面に対して昇降可能な生地ガイド23と、生地ガイド23を昇降させるパルスモータ25bと、パルスモータ25bの回転角度を検出することで生地ガイド23の昇降位置を検出するエンコーダ25cと、生地ガイド回動角度制御プログラム62aを実行することでパルスモータ25bの回転角度を制御するCPU61と、を備える。
(もっと読む)
ミシンの糸調子装置
【課題】リセット機構を駆動させるときの駆動トルクの増大を抑制すること。
【解決手段】複数の糸を用いて縫製を行うミシンにおける各糸の糸張力を一つの駆動源の駆動又は手動操作により同時に調整し、各糸毎に設けられた糸張力調整機構10と、各糸毎に設けられ、各糸の張力を手動操作で個別に微調節する糸張力微調整機構30と、各糸毎に設けられ、糸張力微調整機構により各糸に付与した張力を糸張力調整機構に連動させて基準値に復帰させるリセット機構50と、を備えるミシンの糸調子装置1において、リセット機構は、それぞれの糸の張力を基準値に復帰させるタイミングをずらして各糸の張力を基準値に復帰させる。
(もっと読む)
ミシンの中押さえ装置
【課題】縫製中に縫製物におけおる縫製箇所の厚みが変化した場合であっても、中押さえの下死点における針板からの高さ位置を調節することにより、ミシン主軸に過度の負荷が加わってしまうのを防止するとともに、縫製不良が発生してしまうのを防止する。
【解決手段】 中押さえ6を所望の前記高さ位置に下降させるために高さ調節モータ52が出力する初期出力値によって中押さえ6を下降させ、中押さえ6により縫製物を押さえつけた結果、高さ調節モータ52が実際に出力した現実出力値と初期出力値とを比較し、現実出力値と初期出力値との偏差が予め決定されている基準値を超えた場合には、偏差が基準値となるように高さ調節モータ52の出力値を修正し、修正した出力値に基づいて中押さえ6を下降させることにより、中押さえ6の高さ位置を調節する制御を行う制御手段55を有する。
(もっと読む)
ベルトループ供給装置
【課題】簡易な構成で、ベルトループの繰出し不良や使い果たしを判断することで、縫い付け不良を防止する。
【解決手段】ベルトループ供給装置13は、ステッピングモータ44を駆動源としてテープ材Tを所定の経路に沿って繰り出す繰出し手段37と、繰出し手段37によるテープ材Tの繰出しに負荷を与える付勢手段60と、ステッピングモータ44の実回転量を検出するロータリーエンコーダ65と、繰出し手段37に接離可能とされ、接近してテープ材Tの先端を挟持し、当該先端を挟持したまま離間して所定の経路の終端までテープ材Tを引き出す引出し手段38と、テープ材Tを所定の長さに切断する切断手段34と、引出し手段38により引き出されたテープ材Tを把持し、切断手段34により切断されたテープ材Tの両端を折り曲げてミシン本体12に供給するループ供給手段35と、繰出し手段37の駆動を制御する制御部51とを備えている。
(もっと読む)
121 - 140 / 317
[ Back to top ]