
Fターム[3C007AS26]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 高所工事用(例;電線工事用) (9)
Fターム[3C007AS26]に分類される特許
1 - 9 / 9
作業用器具
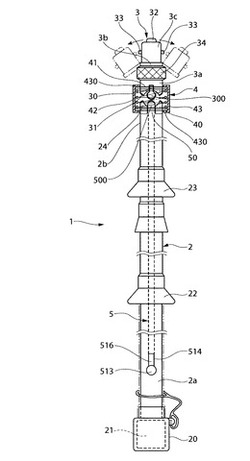
【課題】先端部において回動支持される工具を、手元の操作によって所望の角度位置で固定して、所要の作業を確実に行えるようにする。
【解決手段】筒状の操作棒2と、該操作棒2の先端部2aに同一軸線上に配置されるとともに、作業に使用される工具6が直接又は間接的に接続される接続体3と、操作棒2の先端部2bおよび接続体3の基端部3aが互いに離間する方向に付勢された状態で、操作棒2および接続体3を相対回動自在に連結する連結部4と、相対回動する操作棒2および接続体3を所望の角度位置で固定する位置固定操作、該位置固定を解除する解除操作が手元で行えるように構成される操作機構部5とを備える。
(もっと読む)
遠隔操作用把持工具

【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
遠隔操作用作業器具
【課題】簡単な構成で主操作棒に撓みが発生するのを効果的、且つ確実に防止できる遠隔操作用作業器具を提供する。
【解決手段】固定具4と回動具5とが支持回動軸19を介して回動可能に結合された先端作業工具3と、先端部に固定具4が連結された主操作棒1と、支持回動軸19より突出した回動具5の受動片5aに先端部が回動可能に連結された補助操作棒2と、主操作棒1に操作用回動軸10を介して回動可能に支持され、操作用回動軸10より受動片5aと同一方向に突出した作動片7aに補助操作棒2の基端部が回動可能に連結されて、梃子の作用で補助操作棒2を移動させて可動具5を固定具4に対し接離する方向に回動させる操作ハンドル7と、主操作棒1と補助操作棒2の間に配置されて、一端部が主操作棒1に固定され、且つ他端部が補助操作棒2に対し移動可能に連結または保持されて主操作棒1と補助操作棒2とを略一定の間隔に保って連結する連結保持具6と、を備えている。
(もっと読む)
汎用油圧工具の操作ユニット
【課題】1人の作業者であっても汎用油圧工具を容易に操作しながら確実に作業することができるとともに、全天候作業が可能な汎用油圧工具の操作ユニットを提供する。
【解決手段】グリップ部2に連設した操作部3に、油圧の少なくとも加圧用および加圧解除用の2種の操作スイッチ13、14と、両端が外部に開口した油路24とを設ける。絶縁操作棒4に内装した油管38の一端部を操作部3の油路24の一端部に連通接続し、汎用油圧工具1の作動油流路に、油管38の他端部を油圧用管継手52を介して連通状態に着脱自在に連結する。操作部3の油路24の他端部を、制御装置の油圧切換部にフレキシブル油圧配管31を介して連通接続する。油圧切換部を切換制御する電磁切換弁に各操作スイッチ13、14を電気配線22を介して接続する。
(もっと読む)
遠隔操作用ヤットコ
【課題】 硬くて円形断面を有する被把持物を含めた種々の被把持物を遠隔操作により確実に把持できる架線工事用の遠隔操作用ヤットコを提供する。
【解決手段】 固定把持部2の中間部11に、凹状把持面20を有するサブ把持体21を、可動把持部3側に向けて進出する進出位置と、後退する後退位置との2位置のいずれかに設定できるよう進退動可能に取付け、前記サブ把持体21を前記後退位置に設定したとき、被把持物40bを固定把持部2の先端把持面4と可動把持部3の先端把持面5との間に把持でき、前記サブ把持体21を前記進出位置に設定したとき、被把持物40bを可動把持部3の中間部13とサブ把持体21の凹状把持面20との間に把持できるように構成している。
(もっと読む)
万能把持スティック
【課題】 種々の形状や大きさの対象物を安定して把持することができ、さらには必要に応じて対象物を切断し、そのままこれを保持することができ、部材が入り組んだ場所でも容易に対象物を把持することができ、作業性が向上し、操作性がよく、取り扱い性に優れた万能把持スティックを提供する。
【解決手段】 ロッド本体3と、ロッド本体3の先端に備わる少なくとも2本の爪部材2とを有し、爪部材2の少なくとも1本は根元部を支点に回動可能な可動爪4であって、可動爪4を回動させて爪部材2を閉じることにより把持対象物に対して対向する方向から挟んで把持可能であり、爪部材2はブラケット15を介してロッド本体3に回転自在に取り付けられ、ブラケット15は周縁内側に貫通孔18が複数個形成されたフランジ部17を有し、フランジ部17は、ロッド本体3の先端と貫通孔18を挿通するノブ16を介してロッド本体3に固定される。
(もっと読む)
架空配電線路用作業装置
【課題】ブーム先端の重量増を抑え、さらには操作性を向上させ、安全にマニピュレータを誘導操作することが可能な架空配電線路用作業装置を提供する。
【解決手段】キャビン2と、キャビン2に取り付けられ、その先端に力センサ32を介して複数種の作業工具34を交換して装着可能なマニピュレータ31と、マニピュレータ31の動作を制御する制御装置38とからなり、キャビン2に搭乗したオペレータHがマニピュレータ31を操作して架空電線路に対して作業を行う架空配電線路用作業装置3において、制御装置38は、インピーダンス制御によって力センサ32で検出された外力の方向へマニピュレータ31を動作させる動作指令を生成する動作指令生成部を備え、動作指令生成部は、力センサ32の出力から、オペレータHが作業工具34へ加えた力のみを抽出する操作力抽出部を設けた。
(もっと読む)
アームの制御装置
【課題】3次元レーザ計測器で測定した3次元位置データから制御点データを直接設定できるようにすることで作業性を向上させるアームの制御装置を提供する。
【解決手段】少なくともアームの関節の目標角度を計算する制御手段を備え、アームの制御点の位置および姿勢に応じて制御手段で目標角度が計算されるアームの制御装置において、前記アームの制御点の位置を3次元位置計測手段により求めるようにした。
(もっと読む)
把持装置
【課題】 上方に作業スペースが確保できない箇所の、例えば、電柱の上部に作られた巣を容易に回収して撤去することのできる把持装置を提供すること。
【解決手段】 回動軸14を中心に回動する回動部材11、12と、この回動部材11、12の長尺部11c、12c先端に取り付けられた爪形状部13と、回動部材11、12の短尺部11b、12bに回転可能に取り付けられた回転軸15、16と、この回転軸15の雌ネジ部に雄ネジ21aが螺合するとともに回転軸16の貫通穴に一端部が回転自在に係合する雄ネジ部材21と、この雄ネジ部材21の一端側に連結されて雄ネジ21aを回転させる操作棒を連結するジョイント23と、を備える。この把持装置10は、雄ネジ部材21を回転させて爪形状部13の引掻爪13e〜13gを接離させることによりその間に画成される空間S内に巣などの目的物を把持することができる。
(もっと読む)
1 - 9 / 9
[ Back to top ]